
Fターム[4C601DD23]の内容
Fターム[4C601DD23]に分類される特許
61 - 80 / 194
弾性映像具現装置および方法
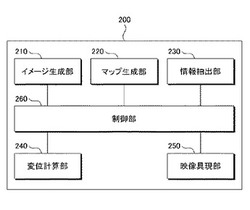
【課題】弾性映像具現装置および方法を提供する。
【解決手段】本発明の実施形態に係る弾性映像具現装置は、超音波映像データの最大圧力値と最小圧力値を補間して複数の第1データを生成する補間部と、生成された複数の第1データを用いてピラミッド映像を生成するイメージ生成部と、生成されたピラミッド映像を用いてモーション方向を含むモーションマップを生成するマップ生成部と、生成されたモーションマップに基づいて変位を計算する変位計算部と、計算された変位を用いて弾性映像を具現する映像具現部とを備える。
(もっと読む)
超音波探触子及び超音波診断装置

【課題】弾性画像診断における高画質な弾性画像を、任意の時相において安定して描出できるようにする。
【解決手段】超音波送受信面に配置された圧迫板31と、圧迫板と被検体との間の圧力を測定する圧力計測部21と、圧力計測部によって計測された圧力に基づいて圧迫動作を制御する自動圧迫機構22とを備えて超音波探触子10を構成する。これにより、超音波探触子を被検体に対して、所望の一定速度にて、自動で一方向に圧迫操作させることができるから、任意の時刻において高画質な弾性画像データを取得することができ、かつ、圧迫動作の再現性を保持することができる。
(もっと読む)
圧力情報を提供する超音波システムおよび方法
【課題】圧力情報を提供する超音波システムおよび方法を提供する。
【解決手段】本発明における超音波システムは、対象体に圧力を印加する第1の時間に超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して第1の超音波データを取得し、前記対象体に印加された前記圧力を解除する第2の時間に超音波信号を前記対象体に送信し、前記対象体から反射される超音波エコー信号を受信して第2の超音波データを取得する超音波データ取得部と、前記第1および第2の超音波データに基づいて圧力振幅(圧力の大きさ)情報、圧力印加周期情報および超音波プローブ傾斜情報を含む圧力情報を形成するプロセッサとを備える。
(もっと読む)
超音波診断装置及びその制御プログラム
【課題】弾性画像表示領域における生体組織の弾性に関する物理量を、より正確に演算することができる超音波診断装置及びその制御プログラムを提供する。
【解決手段】エコー信号Sa,Sbにおいて、関心領域における生体組織深部側の端部に相当する部分である点P,P′を相関ウィンドウWa,Wbの設定開始点とし、この設定開始点P,P′から前記関心領域における体表面側の端部に相当する部分であるQ,Q′へ向かって前記エコー信号Sa,Sbに前記相関ウィンドウWa,Wbの設定を順次行なって、これら相関ウィンドウWa,Wb間で相関演算を行ない、生体組織の各部における変位の算出を行なうことを特徴とする。
(もっと読む)
超音波診断装置およびその制御プログラム
【課題】弾性画像を表示させるか否かの判定を適切に行なうことができる超音波診断装置及びその制御プログラムを提供する。
【解決手段】生体組織の弾性に関する物理量に基づいてフレーム毎の弾性画像を作成し表示する超音波診断装置1であって、生体組織に超音波を送信して得られたエコー信号に基づいて、生体組織における各部の変位データHDからなる変位フレームデータHFDを作成する変位フレームデータ作成部51と、前記変位データHDの中からエラーデータEDを特定するエラーデータ特定部52と、前記変位フレームデータHFDに基づいて作成される弾性画像を表示させるか否かを、前記変位フレームデータHFDにおいて前記エラーデータEDを除いたエラー除外データ群RDを対象にして判定する判定部53と、を備えることを特徴とする。
(もっと読む)
超音波診断装置、超音波画像処理装置、医用画像診断装置及び医用画像処理装置
【課題】三次元トラッキングによって算出した三次元の心内外膜面位置情報等の組織位置情報から、心内膜面や心外膜面の局所面積や心内外膜間の局所体積を算出し壁運動情報として用いることで、精度の高い三次元的かつ定量的な壁運動評価を可能とする超音波診断装置等を提供すること。
【解決手段】各時相において診断対象となる組織を三次元的に構成する各点の位置座標情報を取得し、当該位置情報を用いて、診断対象となる組織の運動を評価するための定量値を算出し、所定の形態にて出力する。従って、三次元的なトラッキングによって取得された壁運動情報を二次元情報に変換せず、三次元的な位置座標情報を用いて運動評価のための定量値を算出しているため、より精度の高い医療情報を提供することができる。
(もっと読む)
熱付与量を低減した超音波撮像のためのシステム及び方法
【課題】音響放射圧インパルス(ARFI)撮像において組織内に預託されるエネルギー量を低減させる方法を提供すること。
【解決手段】超音波撮像法を提供する。本方法は、関心領域内部に複数の箇所を特定する工程と、複数の箇所のうちの2つ以上の箇所にある決まった順序でプッシングパルス及びトラッキングパルスを含むパルスシーケンスを伝達する工程と、パルスシーケンスが伝達される複数の箇所の各々に運動補正シーケンスを適用する工程と、を含む。
(もっと読む)
超音波測定に用いられる圧迫装置とその圧迫制御方法、および光音響計測装置とその制御方法
【課題】被検体との音響インピーダンスの整合をとることができると共に、マッチング液が漏れることや溢れることを抑制することが可能となる超音波測定に用いられる圧迫装置等を提供する。
【解決手段】被検体からの超音波を受信して該被検体の生体情報を取得する超音波測定に用いられる、該被検体を圧迫するための圧迫装置であって、
前記被検体を圧迫する際に用いられる、水平面に対し垂直方向に対向させた二枚の圧迫プレートと、
前記垂直方向に対向させた二枚の圧迫プレートの上部端の間に張り渡された、被検体を挿入するための可撓性シートと、
前記垂直方向に対向させた二枚の圧迫プレート間の距離を相対的に移動させ、前記可撓性のシートに挿入された被検体を該可撓性シートを介して挟んで圧迫する圧迫機構と、
前記可撓性シート上にマッチング液を供給するための供給手段と、を有する構成とする。
(もっと読む)
超音波測定に用いられる圧迫装置とその圧迫制御方法、および光音響計測装置
【課題】被検体との音響インピーダンスの整合をとることができると共に、マッチング液が漏れることや溢れることを抑制することが可能となる圧迫装置等を提供する。
【解決手段】光音響計測に用いられる被検体を圧迫するための圧迫装置であって、
前記被検体を圧迫する際に用いられる、水平面に対し垂直方向に対向させた二枚の圧迫プレートと、
前記垂直方向に対向させた二枚の圧迫プレートの両側面間と下面間とを覆って封止すると共に、該二枚の圧迫プレートの上面間を覆わずに上部が開口するように配設されたフレキシブル部材と、
前記垂直方向に対向させた二枚の圧迫プレート間の距離を相対的に移動させ、前記被検体を挟んで圧迫する圧迫機構と、
前記二枚の圧迫プレートと該二枚の圧迫プレートの両側面間と下面間に配設されたフレキシブル部材とで囲まれた空間部に、マッチング液を供給し、該供給されたマッチング液を廃液する配管ユニットと、を有する。
(もっと読む)
超音波診断装置
【課題】 診断部位の深さ方向における超音波反射率の大きい部位と弾性率の大きい部位との関係を理解することが可能な超音波装置を提供する。
【解決手段】 反射率演算回路9及び弾性率演算回路10により被検体13内への超音波走査方向における生体組織の超音波反射率と弾性率とを計測し、診断部位の深さ方向を示す深度軸と、前記深度軸に直交する時間軸として、スキャンコンバータ11は順次時間軸方向にスクロールさせて前記深度軸における被検体13内の部位の超音波反射率と弾性率とを画像化して画像表示装置12に表示する。
(もっと読む)
超音波診断装置及びプログラム
【課題】生体組織に超音波の送受信を行い、生体組織の弾性画像と、この弾性画像以外の生体組織に関する非弾性画像とを表示する超音波画像装置において、フレームレートを向上させる。
【解決手段】生体組織の弾性画像とBモード画像とを合成して得られる超音波画像G1を作成するにあたり、前記弾性画像を作成するエコー信号を得るための弾性画像用超音波送受信E1と弾性画像用超音波送受信E2との間に、前記Bモード画像を作成するエコー信号を得るためのBモード画像用超音波送受信B1を行う。
(もっと読む)
超音波診断装置
【課題】圧迫の程度に応じて弾性が異なるという生体組織の非線形性を定量化した画像を得ることができる超音波診断装置を提供する。
【解決手段】被検体の生体組織に圧迫を加えながら超音波を送信して得られた取得時刻が異なる一対のフレームを構成する各エコー信号に基づいて、生体組織の各部における変位を算出する変位算出部51と、変位算出部51によって算出された変位に基づいて、生体組織の弾性画像を作成する弾性画像作成部53と、前記変位算出部51によって生体組織の同一部分について複数算出された変位の分散を生体組織の各部について算出する分散算出部52とを備え、前記弾性画像作成部53は、変位の分散を反映した弾性画像を作成することを特徴とする。
(もっと読む)
超音波診断装置
【課題】実際の生体組織の弾性をより正確に反映した弾性画像を安定して表示させることができる超音波診断装置を提供する。
【解決手段】被検体に超音波を送信して得られたエコー信号に基づいて、生体組織の変位を算出する変位算出部61と、変位算出部61によって算出された変位に基づいて、弾性画像フレームデータを作成する弾性画像フレームデータ作成部62と、エコー信号の信頼度に基づいて重み付け係数を設定する重み付け係数設定部65と、前記重み付け係数が乗算された時間的に異なる複数の弾性画像フレームデータを加算処理して表示部に表示される弾性画像を作成する表示弾性画像作成部63と、を備えることを特徴とする。
(もっと読む)
組織境界判別装置、組織境界判別方法、組織境界判別プログラムおよび当該プログラムを記録した記録媒体
【課題】エコー信号を用いた組織境界の自動判別における判別精度を向上した組織境界判別装置を提供する。
【解決手段】本発明に係る組織境界判別装置100は、形状を変化させていない状態の被測定物において検出される第1の反射位置と、形状を変化させた状態の被測定物において検出される第2の反射位置とを検出する反射位置検出部11と、第1の反射位置と第2の反射位置とから、被測定物の形状変化による反射位置の変化率を算出する変化率算出部12と、第1の反射位置および変化率を参照して、第1の反射位置がいずれの組織に属するのかを判別する判別部20と、を備えている。
(もっと読む)
超音波検査ロボットシステムおよび超音波検査ロボットの制御方法
【課題】操作者に違和感を与えることなくその手の動きにロボットアームが追随し、操作者が超音波プローブから手を放したときにも、超音波プローブの位置を保持することを可能にする。
【解決手段】超音波プローブ12と、超音波プローブを保持するロボットアーム11と、超音波プローブに加わる三次元方向の力を検出する力センサ13と、この力センサの検出結果に基づき、操作者の手の動きにより超音波プローブに加えられる三次元方向の外力を認識し、前記外力に従ってロボットアームを動かすアクチュエータ制御部16と、所望の部位の画像を記憶する画像記憶部と、超音波プローブからの画像と前記記憶された画像とを比較する画像比較部とを有する。
(もっと読む)
超音波診断装置
【課題】被検体内に挿入される超音波探触子に設けられたバルーンに流体を出し入れして生体組織を圧迫して弾性画像を生成する超音波診断装置において、適切な圧迫操作をサポートする。
【解決手段】本発明の超音波診断装置は、被検体内に挿入される超音波探触子に設けられたバルーンを用いて生体組織を圧迫して弾性画像を生成するものである。バルーン内部の圧力を計測する圧力センサを有しており、画像表示部に、圧力センサで計測された圧力の推移を表す圧力ステイタスモニタ60、及び圧力センサで計測された圧力に基づくバルーンの膨張及び収縮度合いを表すバルーンステイタスモニタ62を表示する。これにより、検査者は自らの手動操作により生体組織に対してどのような圧迫が加えられているのか、バルーンがどのように膨張及び収縮しているのかを視覚的に把握することができる。
(もっと読む)
骨検査システムおよび下腿支持装置
【課題】下腿の骨に荷重を加え、骨の変形に基づく検査を行う骨検査システムにおいて、下腿の位置決めを容易に行う。
【解決手段】被検者Pの下腿Lを、回動ベース24上に設けられた近位支持ブロック26と、遠位支持ブロック28上に載置する。近位支持ブロックは腓骨頭を支持し、遠位支持ブロックは頸骨遠位端の外顆または内顆を支持する。回動ベースは、主ベース22に対して、被検者の膝付近に位置する回動軸回りに回動可能に支持され、一方、足首付近に設けられた上下機構30によりこの部分が上下させられる。上下機構により、下腿を載せた状態で回動ベース24を回動させ、下腿を水平に位置決めする。
(もっと読む)
トランスデューサー配置、及び物質の超音波エラストグラフィデータと超音波データを取得する方法
本発明は、トランスデューサー配置、特に組織情報を得るためのトランスデューサー配置と、組織情報を得るためのトランスデューサー配置を用いる方法と、トランスデューサー配置を含む手袋とに関する。物質40を分析するためのトランスデューサー配置21は、分析される物質40に機械的変位を誘起し及び受け取るための第1のトランスデューサー要素51と;及び分析ユニット30とを有する。前記配置が分析される物質40の曲がった表面に適合させるために柔軟性であるように設けられ;及び前記トランスデューサー配置21が、機械的変位の低周波数スペクトルから第1のシグナルを取得するようにされ、前記第1のシグナルが分析される物質40の超音波エラストグラフィ的性質に関連し;及び前記トランスデューサー配置21が、前記第1のトランスデューサー要素51により受け取られた機械的変位の高周波数スペクトルから第2のシグナルを取得するようにされ、前記第2のシグナルが分析される物質40の超音波的性質に関連する。本発明によるトランスデューサー配置を用いて、分析される物質の組織分布解剖学的情報と、弾性性質についての情報を平行して生成することが可能となる。これにより本トランスデューサー配置は、物質の表面の不均一性に対して最適に適合させることができる。これにより検査者又はトランスデューサー配置の使用者が、通常不均一な表面プロファイルを持つ領域であって、そのような領域に到達することが非常に難しく、又はその領域の検査が検査される人と同様に検査者にも不都合を生じる恐れがある領域の分析を可能とする。 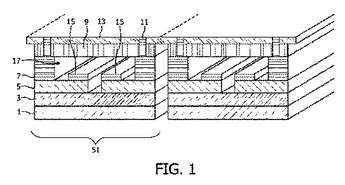 (もっと読む)
(もっと読む)
超音波診断装置
【課題】超音波ビームにより表面ポイントを特定する装置に適した表示画像を提供する。
【解決手段】骨表面114においては、比較的大きな振幅の受信信号が得られ、エコートラッキングの技術を用いて、骨表面114に対応した表面ポイントがトラッキングされる。Bモード画像110内に表示されるカーソルライン120は、エコートラッキング用の超音波ビームに対応している。各カーソルライン120の位置にエコートラッキング用の超音波ビームが形成されていることを示している。各カーソルライン120上には、ゲートマーカ130が設けられている。各ゲートマーカ130は、表面ポイントが抽出される範囲を示している。さらに、エコートラッキング用の超音波ビームに沿って得られる受信信号(RF信号)のうち、ゲートマーカ130に対応したゲート期間内の信号を映し出した波形画像も形成される。
(もっと読む)
骨検査システム
【課題】下腿の骨に荷重を加え、骨の変形に基づく検査を行う骨検査システムにおいて、下腿の位置決めを容易に行う。
【解決手段】被検者Pの下腿Lを、回動ベース24上に設けられた近位支持ブロック26と、遠位支持ブロック28上に載置する。近位支持ブロックは腓骨頭を支持し、遠位支持ブロックは頸骨遠位端の外顆または内顆を支持する。回動ベースは、主ベース22に対して、被検者の膝付近に位置する回動軸回りに回動可能に支持され、一方、足首付近に設けられた上下機構30によりこの部分が上下させられる。上下機構により、下腿を載せた状態で回動ベース24を回動させ、下腿を水平に位置決めする。
(もっと読む)
61 - 80 / 194
[ Back to top ]