
Fターム[4F035BA03]の内容
噴霧制御装置 (2,732) | 噴霧物質の放出の制御 (361) | 放出の時間的制御 (112) | 複数放出口のためのシーケンス制御 (11)
Fターム[4F035BA03]に分類される特許
1 - 11 / 11
噴霧装置
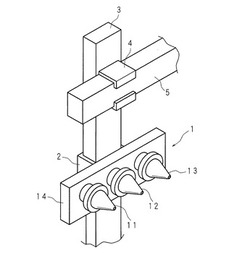
【課題】異なる種類の溶液、微粒子または気体を精度良く噴霧することができ、厚さが均一な交互吸着膜を成膜できる噴霧装置を提供する。
【解決手段】噴霧部1では、同様の構成をした3つのノズル(アニオン溶液を噴霧するアニオン用ノズル13、カチオン溶液を噴霧するカチオン用ノズル11、リンス溶液を噴霧するリンス用ノズル12)が同一の水平方向に向いてノズル配置部14に配置されている。これらのノズル間の間隔に関する間隔情報に従って各ノズル夫々に応じて補正された経路でノズル配置部14を移動させながら、各ノズルが対応する溶液を噴霧する。
(もっと読む)
噴霧システム

【課題】装置規模の増加を可能な限り抑制しつつ、複数の液体を植物に供給可能な噴霧システムを提供すること。
【解決手段】噴霧システム1は、水タンク5と、薬剤タンク6と、電解水タンク7,8と、切替弁10と、サブタンク15と、液体供給系30i(iは、1以上の自然数)と、制御系とを備えている。切替弁10は、液体供給系30iへと流動させる液体を、水Wa,液体状の薬剤ac、酸性水aw、アルカリ水iwのうちのいずれか1つに切り替える。液体供給系30iは、少なくとも、複数の噴霧ノズル31と、複数の回路モータバルブ35ijと、流動パイプ36iと、流体機械45iとを1つの系統として備え、それぞれ、規定された区画である規定区画70iへと、切替弁10から出力された液体を噴霧する。制御系は、液体の種類を決定して、当該種類の液体が噴霧ノズル31から噴霧されるように制御対象を制御する。
(もっと読む)
ロボット塗装システム及びこれを用いた塗装方法
【課題】被塗装対象に生じる塗装ムラの発生を抑制することができ、塗装のサイクルタイムを短縮することができるロボット塗装システム及びこれを用いた塗装方法を提供する。
【解決手段】ロボット塗装システムは、ロボット及び塗装治具を備えており、塗装治具は、フレーム部30、駆動源33及び複数の塗装ガン4を有している。複数の塗装ガン4A,4B,4Cは、それぞれ一定方向Eに広がる状態で塗料を噴射し、一定方向Eにおいて、塗料の噴射によって形成される中心塗膜層71の両側に、中心塗膜層71よりも塗膜が薄いダスト塗膜層72を形成する。駆動源33は、フレーム部30の形成状態を、複数の塗装ガン4A,4B,4Cが直交方向Wに対して傾斜する右斜め方向に並ぶ第1塗装状態と、複数の塗装ガン4A,4B,4Cが直交方向Wに対して傾斜する左斜め方向に並ぶ第2塗装状態とに可変させるよう構成されている。
(もっと読む)
離型剤の塗布装置
【課題】型開き時における金型間のスペースに制約があっても、複数の成形面に離型剤を塗布できるようにする。
【解決手段】塗布装置Aは、駆動装置200に取り付けられるベース部材10と、ベース部材10に着脱可能であって複数のノズル72を有するノズルユニット50と、複数のノズル72における離型剤Rの吐出を個別に制御する複数のバルブ28を備える。複数のノズル72を複数の成形面100M,101Mと対応させ、各ノズル72における離型剤Rの吐出を個別に制御するので、駆動装置200としてレシプロケータを用い、ノズルユニット50を直線的に移動させることができる。直線運動に必要なスペースは、ロボットアームのような三次元的な動きに必要なスペースに比べて小さくて済む。
(もっと読む)
デュアルスプレイ式自動ディスペンサ
本発明に係る自動ディスペンサは、2個の液容器(A,B)に入っている幾ばくかの液体を周期的にエアロゾル化して吐出する。互いに異なる性質を有する複数種類の液体、例えば互いに異種の香料や活性物質を、同じ自動ディスペンサに備わる別々の液容器(A,B)に入れて交互に噴霧させることができる。 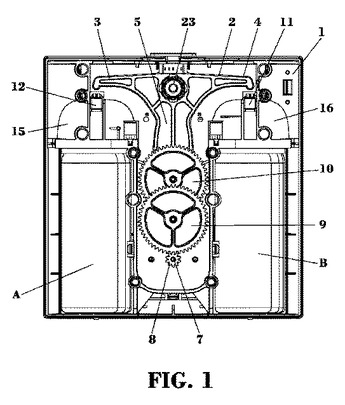 (もっと読む)
(もっと読む)
遠隔制御されるエアロゾル供給システム
本発明は、各々が散布用の液体の貯留部に付属して単一の制御ユニットによって作動させられ制御される複数のエアロゾルディスペンサを有する、エアロゾルを供給するシステムを提供する。香油が供給されることが好ましく、また、任意の散布手段が用いることができるが、圧電的に作動する散布が好ましい。  (もっと読む)
(もっと読む)
噴霧媒体を使用する塗料噴霧装置を制御するための噴霧パラメータを決定するための方法
【課題】噴霧媒体を使用する塗料噴霧装置を制御するための噴霧パラメータを決定する。
【解決手段】第一の噴霧媒体を使用するための、既知の噴霧パラメータにより決定された既知の噴霧パターンが与えられ;前記の噴霧パラメータ及び第二の噴霧媒体の特性を用いて、暫定的な噴霧パターンが計算され;更なる噴霧パターンを与える変更された噴霧パラメータを取得するために、前記既知の噴霧パラメータが変更され;前記更なる噴霧パターンが、前記既知の噴霧パターンに、基準の範囲内で類似するポイントに達するまで、前記変更された噴霧パラメータが変更され;前記更なる噴霧パターンに対応する前記変更された噴霧パラメータが、前期第二の噴霧媒体のための噴霧パラメータとして意図され、前記第二の噴霧媒体が使用されるときにはいつでも、前記塗料噴霧装置に与えられ;前記噴霧パラメータは、前記塗料噴霧装置の噴霧挙動に影響を与える複数の空気の流量を有する。
(もっと読む)
少量排気スプレー塗装処理装置
【課題】
塗装室に吸引されて外部へ排気される空調空気量を削減し、工業的に経済的で、環境保全の側面からも、少ない排気量で可能な塗装室を得ることを目的とし、特に大形の被塗装物であっても少ない排気で塗装を可能とする小形の塗装室を実現する。
【解決手段】
排気装置を備えた塗装室と、予め記憶され設定された作動信号により繰り返し作動を行う塗装ロボットを一体的に塗装ユニットとして構成し、この塗装ユニットを、前記塗装室内を通過する被塗装物に対して必要な塗装位置になるよう制御可能な移動手段によって往復動可能にする。制御手段はサーボアクチュエータ等で塗装ロボットの作動制御と連動させ限定された範囲での塗装を行い、塗装位置に追随する小形の塗装室での塗装を可能とする。
(もっと読む)
塗装装置及び塗装プログラム
【課題】 効率良く回転塗装を行い教示が容易な塗装ロボットを提供する。
【解決手段】 ワークは、コンベアによって搬送される回転体に取り付けられる。回転体の回転方向は転換点の上流側と下流側で逆転する。塗装ロボットはコンベアの傍らに取り付けられる。オペレータは転換点の上流側のワークに対して教示を行い、それとともにそのワークが取り付けられている回転体の中心座標を入力する。制御データ作成装置は、入力された中心座標を中心とするミラー変換をして、転換点より下流側に位置する回転体に取り付けられるワークに対する塗装ロボットの動作を指令するためのデータを自動生成する。
(もっと読む)
板材の塗装装置
【課題】 均一な塗膜で、生産性高く、板材の一部の区域に塗装する板材の塗装装置を提供する。
【解決手段】 板材1を搬送する搬送ライン2。搬送される板材1を検知するセンサー3。センサー3より搬送ラインの前方に配置され塗料4をスプレー塗布するスプレーガン5。センサー3で板材1が検知されてからスプレーガン5の塗布位置に板材1の所定箇所が達する時間後にスプレーガン5の塗布を開始させると共に、スプレーガン5の塗布開始から所定時間後にスプレーガン5の塗布を停止させるように、スプレーガン5の作動を制御する制御手段6。これらを備えて塗装装置を形成する。板材1をセンサー3で検知してから、所定の時間後にスプレーガン5の塗布を開始すると共に、所定の時間後にスプレーガン5の塗布を停止することによって、搬送ライン2で板材1を一方向に送る間に、板材1の所定の区域に塗装することができる。
(もっと読む)
自動スプレーガン
【課題】 塗料容器から塗装ガンへの塗料の供給経路を短く設定できる自動スプレーガンを得る。
【解決手段】 自動スプレーガン10では、塗装ガン118に塗料容器144が一体的に設けられた構成であるため、従来の自動塗装機の如く塗料供給装置が塗装ガンとは独立して離れて設置されている場合に比べて、塗料の供給経路(連結管148及び継手142)を大幅に短く設定できる。これにより、例えば、自動塗装機の全体構成を簡素化できると共に、塗料供給経路の充分な洗浄が可能であるため、所謂塗料コレステロールの堆積による所謂塗ブツ不良の発生を防止でき、さらに、色替え・洗浄に伴うロス塗料および洗浄シンナーの量を大幅に低減できる。またさらに、自動塗装機本体に着脱自在に取り付けられる構成であるため、例えば、色替えや洗浄のための段取り作業を、実際の塗装作業とは別のラインで実施でき、生産性が大幅に向上する。
(もっと読む)
1 - 11 / 11
[ Back to top ]