
Fターム[5B047AA07]の内容
Fターム[5B047AA07]に分類される特許
1 - 20 / 144
スキャナ装置
画像読取装置及びその画像読取方法
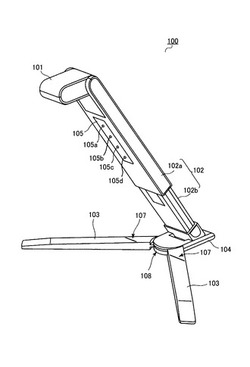
【課題】照明により撮影対象(例えば書籍など)の白飛現象の発生を防止し、かつ、撮影対象の端部のラインを適切に検出することができる画像読取装置及びその画像読取方法を提供する。
【解決手段】画像読取装置100は、撮影部101と原稿載置面(撮影面)との距離を変化させる方向に伸縮可能なアーム102と、アーム102に設けられて、撮影面に載置された書籍(撮像対象物)を斜め方向から照らす光源部105と、を備える。また、画像読取装置100は、光源部105が、書籍を斜め方向から照らして書籍の端部に影部分を発生させ、発生した影部分を含む撮影データを取り込むデータ取得部と、取り込んだ撮影データに基づいて、撮像対象物のエッジ特徴を検出するエッジ検出部と、を備える。エッジ検出部は、2値化データが、撮像対象物の端面のラインに、所定数以上、連続して発生した場合、エッジ特徴を検出する。
(もっと読む)
画像読取装置及びその画像読取方法

【課題】消費電力を削減しつつ、照明により白飛現象が発生しにくい画像読取装置及び画像読取装置の画像読取方法を提供する。
【解決手段】画像読取装置100は、撮影部101と原稿載置面(撮影面)との距離を変化させる方向に伸縮可能なアーム102と、アーム102に設けられて、撮影面を斜め方向から照らす光源部105と、を備える。MPUは、アーム102の長手方向に並んで設けられたLED105a〜105dのうち、[消灯範囲2]として照明範囲外を照らすLED105aを消灯する。また、MPUは、照明範囲の照度が所定以上の場合、[消灯範囲1]として照明範囲に近いLED105c,LED105dを消灯する。
(もっと読む)
撮像装置
【課題】2眼カメラにより検出した距離情報を利用して特定被写体の背景をぼかす機能において、2眼カメラの画角差が大きい、または光軸ずれが大きいと共通領域が狭くなり撮影画角が狭くなってしまう。
【解決手段】2眼カメラ画像の共通領域外の距離情報を共通領域の距離情報から推定し、推定できない画素の距離情報値に関しては、背景ぼかし画像の指定領域の距離情報値に比べて大きい値とすることにより、非共通領域を含む広画角の画像の背景ぼかし画像を生成することができる。
(もっと読む)
電子測定器
【課題】測定対象物の寸法を電子的に測定可能な電子測定器を提供する。
【解決手段】等ピッチで1列に並べられた受光素子アレイ20と、受光素子アレイ20に結像するレンズ系16と、測定対象物25へ光を照射する光源26と、測定対象物25から反射した光を受光素子アレイ20により受光して出力されるアナログ信号をディジタル処理する信号処理部28と、信号処理部28によって得られたディジタル計数値DSを表示する表示部12とを備え、ディジタル計数値DSにより、測定対象物25の大きさを表示することを特徴とする電子測定器10。
(もっと読む)
三次元分光的符号化撮像のための方法と装置
【課題】簡単な構成で、深度に関して解像度の良い、広い、三次元撮像方法の実現。
【解決手段】位相感知分光的符号化撮像を使用する、三次元表面測定値を得るための方法および装置が記述される。横方向および深度の両者についての情報は、単一モード光ファイバを介して送信され、本手法を小型プローブへの組み込むことが可能となる。
(もっと読む)
歪み補正量取得装置及び方法
【課題】小規模な装置構成で容易に且つ高精度に、撮像装置の歪み補正量を取得する。
【解決手段】レーザ発光器4と、該レーザ発光器4から出力されるレーザ光を偏向し、角度を変えて撮像装置1に入射させる光偏向器5を用いる。画像処理装置6は、光偏向器5によって角度を変えて撮像装置1にレーザ光を入射して得られる該レーザ光の実際の結像位置と、撮像装置1に歪みがないと仮定して、該撮像装置1に角度を変えてレーザ光を入射したときに得られる該レーザ光の理想結像位置との差分(歪み変化量)を算出し、該歪み変化量から当該撮像装置1の歪み補正量を求める。
(もっと読む)
撮像装置
【課題】 複数の主撮像光学系を備えず、従来の撮像操作と同じ操作によって立体画像の撮像をする撮像装置に関する。
【解決手段】 複数の測距レンズに対向して配置された副撮像素子を有してなる測距光学系、各副撮像素子の受光面に結像された被写体像に基づく画像データを用いて被写体までの距離を算出する被写体距離算出手段、被写体までの距離から2次元の距離マップ画像を生成する距離マップ画像生成手段、主画像と距離マップ画像の各画像特徴量とを算出する画像特徴量算出手段、各画像特徴量を用いて主画像と距離マップ画像をマッピングしたデータを生成するマッピングデータ生成手段、マッピングデータと距離マップ画像を用いて2次元奥行き情報画像を生成する2次元奥行き情報画像生成手段、2次元奥行き情報画像から3次元視差画像を生成する立体画像生成手段、を有してなる撮像装置による。
(もっと読む)
高速反射屈折式ライトフィールドレンダリングのための光線画像モデル化
【課題】ライトフィールドを取得する単純かつ経済的な反射屈折式カメラ及び方法を提供する。
【解決手段】反射屈折式カメラが、光線構造絵素(レイクセル)の2Dアレイとして定義される光線画像を作製することによって3Dシーンから画像のライトフィールドを作り出す。各レイクセルは光強度、ミラー反射ロケーション、及びミラー入射光の光線方向を取得する。次に、対応するレイクセルを組み合わせることによって光線画像から3D画像がレンダリングされる。
(もっと読む)
撮像用走査式照明装置
【課題】画像センサ等の撮影領域を少ない消費電力で照明できる照明装置を提供する。
【解決手段】光ビームを出射する光源2、CCDカメラ11の撮影領域Aに対して光源1から出射された光ビームを反射しその反射光ビームを2次元走査するガルバノミラー4と、ガルバノミラー4による撮影領域Aの走査周期とCCDカメラ11の画像データを取込む画像取込み部12の画像の取込みタイミングとを同期させる同期制御部6とを備えて構成した。
(もっと読む)
通行監視システム
【課題】複数の監視カメラを用いることなく監視カメラの死角を解消することにより、立入制限エリアへの非許可者の不正侵入を確実に監視し得る通行監視システムを得る。
【解決手段】通行監視システムは、所定の出入口の近傍領域を第1方向から撮影するカメラ1と、カメラ1の画角内において、第1方向とは異なる第2方向から出入口の近傍領域が映るように配置された鏡11と、カメラ1によって撮影された映像内の鏡11に映し出された第1映像と、カメラ1によって第1方向から出入口の近傍領域を撮影した第2映像とに基づいて、出入口を通行する人物が一か複数かを判定する処理部4とを備え、処理部4は、第1映像に基づき第1のアルゴリズムを用いて人物の単複判定を行い、第2映像に基づき第1のアルゴリズムとは異なる第2のアルゴリズムを用いて人物の単複判定を行う。
(もっと読む)
非接触式高分解能の手形取り込みのための装置及び方法
【課題】異なる複数の焦点距離の各々において対象の手の手形画像全体を取り込むための非接触式手形取り込みのためのシステム及び方法を提供する。
【解決手段】、画像取り込みデバイス(14)は、撮像カメラ(32)と、偏向状態に基づいた様々な光路長を伴う複数の光変調素子(42)及び偏向感受型光学素子(40)を有する電気光学配列(34)と、を含む。該デバイスに対して異なる焦点距離の各々において手形画像を取り込ませるように制御システム(38)を画像取り込みデバイス(14)に結合させており、ここで各手形画像は冗長な手形画像データが取り込まれるように隣接する焦点距離における手形画像の焦点深度と重複した焦点深度を有する。制御システム(38)は、各手形画像を位置データと位置合わせすると共に、異なる焦点距離で取り込んだ手形画像から合成手形画像を作成している。
(もっと読む)
三次元形状計測装置、プログラム、コンピュータ読み取り可能な記録媒体、及び三次元形状計測方法
【課題】広い視野に渡る計測対象の三次元形状情報を迅速かつ容易に計測する。
【解決手段】三次元形状測定装置10は、計測対象に投影された光パタンを解析することによって、計測対象の三次元形状を計測する装置である。ここで、三次元形状測定装置10は、光パタンが投影された計測対象を画像として読み取るためのラインセンサ16と、ラインセンサ16により読み取られた画像における光パタンを空間縞解析法に基づいて解析して、計測対象の三次元形状の情報を算出する画像解析部とを備えている。
(もっと読む)
画像出力装置
【課題】 台面上に載置されているものを上方から撮影する場合、例えば本の紙面が湾曲している状態で撮影しているので、歪んだ状態で撮影されてしまう。
【解決手段】
台面上には所定の被写体を載置することが可能であり、カメラ部によりこの台面よりも高い複数の位置から同台面上の撮影を行なう。すると、歪み修正パラメータ演算部は、複数の位置で撮影された画像データに基づいて上記台面上に載置された被写体の表面形状を求め、この表面形状を平面状に戻すパラメータを演算する。そして、画像データ歪み修正演算部が、演算された歪み修正パラメータに基づいて上記画像データに生じている歪みを軽減した平面状の画像データに変換する。この後、出力部は歪みを軽減した平面状の画像を出力する。
(もっと読む)
画像出力装置
【課題】 台面上に載置されているものを上方から撮影する場合、例えば本の紙面が湾曲している状態で撮影しているので、歪んだ状態で撮影されてしまう。
【解決手段】
台面上には所定の被写体を載置することが可能である。投影部がこの台面よりも高い位置から同台面上に所定の絵柄の光を投影すると、カメラ部は上記台面上の撮影を行なう。台面上に被写体が置かれている状態であれば、上記絵柄は立体表面に投影され、歪み修正パラメータ演算部はカメラ部にて上記投影される絵柄を撮影した画像データに基づき、同絵柄の歪みから上記台面上に載置された被写体の表面形状を平面状に戻すパラメータを演算する。そして、画像データの歪み修正演算部は、演算された歪み修正パラメータに基づいて上記カメラ部にて撮影される画像データに生じている歪みを除去した平面状の画像データに変換する。最後に、歪みを除去した平面状の画像を出力する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】多眼カメラにて撮影された複数枚の画像における対応点探索精度を向上させると共に、被写体についてのより多くの色情報を取得すること。
【解決手段】多眼カメラにより撮影された複数の撮影画像の画素値から第一の色情報を算出し、前記算出された第一の色情報を用いて前記複数の撮影画像間の対応点を算出する。算出された対応点を用いて、前記撮影画像の被写体の奥行き情報を算出する。被写体の色を忠実に再現するために用いる第二の色情報を前記複数の撮影画像の画素値から算出する。前記算出された奥行き情報及び第二の色情報を用いて、前記複数の撮影画像を合成する。
(もっと読む)
撮像装置および画像処理情報生成プログラム
【課題】本発明は、光外乱の多い環境でも利用でき、構成が簡易な撮像装置を提供することを目的とする。
【解決手段】撮像装置1は、照明Lで照らされる被写体Aを撮像して、被写体Aの奥行き値を示す奥行き情報と、被写体Aの反射特性を示す反射特性情報と、照明Lの条件を示す照明情報とを画像処理情報として生成するものであって、ステレオ画像として扱える撮像画像を撮像するカメラCと、照明Lと、カメラCが撮像した撮像画像を用いて、画像処理情報を生成する画像処理情報生成装置100とを備え、カメラCが、偏光方向が互いに直交する2つの偏光フィルタを有するレンズと、偏光ビームスプリッタと、偏光ビームスプリッタで分光された光を撮像する2つの撮像素子とを備える。
(もっと読む)
情報処理装置、情報処理方法
【課題】 パターン画像を高速に投影して撮像する為の技術を提供すること。
【解決手段】 ストライプ状の模様が記されたパターン画像を定期的に送信するPC201から、該パターン画像を受信する。パターン画像の送信周期内に、パターン画像におけるそれぞれ異なる水平ラインごとに、該水平ライン上の画素群を繰り返し用いて形成される投影画像を投影部207に入力する。投影部207が投影画像を投影する毎に、該投影のタイミングでカメラ103に撮像させる。
(もっと読む)
スキャナ装置
【課題】 被写体の実際の寸法を測定することなく、正確な寸法で表された被写体のデータを取得できるスキャナ装置を提供する。
【解決手段】 被写体Xに向けて光を放射し且つ被写体Xで反射した光を読み取る読取手段2と、被写体Xを載置されるステージ31とを備え、読取手段2及びステージ31は、所定方向で相対的に変位可能に構成されるスキャナ装置1において、読取手段2と一体的に構成され、前記所定方向に平行な複数のライン光が互いに平行となるように、被写体Xに向けて複数のライン光を照射するライン光照射手段4と、ライン光を照射させた状態で読み取ったデータにおけるライン光のデータに基づき、ライン光の照射を停止させた状態で読み取った被写体のデータを補正する補正手段636とを備えることを特徴とする。
(もっと読む)
カーソルの表示方法およびカーソルの表示プログラム
【課題】二次元画像の奥行き方向における位置の把握や指示をすることができるカーソルを表示するカーソルの表示方法、およびカーソルの表示プログラムの提供を目的とする。
【解決手段】三次元座標上に分布するレーザ点群データ1を所定の視点位置により示した二次元画像内において移動操作自在に注目点を指示するカーソル2を表示するカーソルの表示方法であって、
前記二次元画像内の注目点の三次元座標上における対応位置を演算し、この対応位置を含み、視点位置方向に対して直交する所定の平面状図形領域3を前記対応位置を基準にして三次元座標上に定義し、
前記視点位置から平面状図形領域3内を通過する視野領域を平面状図形領域3を基準に分割し、いずれかの分割領域内に配置されたレーザ点群データ1を非表示処理してカーソルの表示方法を構成する。
(もっと読む)
1 - 20 / 144
[ Back to top ]