
Fターム[5B050BA13]の内容
Fターム[5B050BA13]に分類される特許
161 - 180 / 899
表示装置、表示制御方法、および表示制御プログラム

【課題】画像を切り替える場合に、ユーザが違和感を覚えることを防止する表示装置、表示制御方法、および表示制御プログラムを提供する。
【解決手段】ディスプレイに表示されている画像である第一画像が三次元画像であり、第一画像に変えてディスプレイに表示される画像である第二画像が三次元画像である場合に、所定の視差度より大きい第二画像における領域が表示される(S613)。次いで、所定の視差度より大きい第一画像における領域が消去される(S615)。次いで、所定の視差度以下の第二画像における領域が表示される(S617)。次いで、所定の視差度以下の第一画像における領域が消去される(S619)。これによって、第一画像と第二画像とが切り替えられる。
(もっと読む)
分解形状表示装置および分解形状表示方法

【課題】設計後の設計データに基づいて3次元モデルの内の部品間の位置関係の把握を容易にする。
【解決手段】設計データに基づいて複数の部品から構成される3次元モデルの分解ビューを表示装置に表示するための画像データを生成する分解形状表示装置であって、前記複数の部品の内の一部の部品を回転させた状態の3次元モデルの分解ビューを表示装置に表示するための画像データを生成する対象部品回転表示処理部18を具備する。
(もっと読む)
視差画像生成装置、及びその方法
【課題】 複数の手法によって求められた画面内の奥行き分布による立体感を保持しつつ、オブジェクトの凹凸を表現する視差画像の生成
【解決手段】 第1画像を用いて相互に視差のある少なくとも1枚の視差画像を生成する視差画像生成装置において、複数の方法に基づいて、前記方法毎に3次元空間における再現範囲における前記第1画像内の奥行きの分布を示す分布情報を推定する第1推定部と、複数の前記分布情報を合成して第1奥行き情報を求める第1合成部と、を有する第1算出部と、前記第1画像内のオブジェクト毎の相対的な凹凸を示す第2奥行き情報を求める第2算出部と、前記第1奥行き情報と、前記第2奥行き情報とを前記第1合成部とは異なる方法で統合して第3奥行き情報を求める第3合成部と、前記第3奥行き情報と、前記第1画像とに基づいて、前記視差画像を生成する生成部と、を備えることを特徴とする視差画像生成装置。
(もっと読む)
組版装置、小組作成方法及び小組作成プログラム
【課題】セット商品の商品レコードを同一の小組に自動で割り付けることができる組版装置等を提供することを課題とする。
【解決手段】各商品の属性情報を商品レコードにそれぞれ対応づけて記憶する前記データベースを有する。小組レイアウトフレームに設定された流し込み設定に従って、前記属性情報が同一である複数の前記商品レコードを、前記小組レイアウトフレームを構成するフレームに割り付けて小組を作成する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】重畳表示データをユーザの視野内に重畳して得られる重畳画像を閲覧しやすくする。
【解決手段】画像処理装置100は、環境マップに基づいて、入力画像内に写っている物体のうち所定の平面または曲面を有する物体の位置を決定する重畳表示位置決定部と、重畳表示位置決定部により決定された物体の位置に重畳表示データを設定することで重畳表示画像を生成する重畳表示画像生成部と、ユーザの視野内に重畳表示画像を重畳して表示部に表示させる画像重畳部と、を備える。
(もっと読む)
拡張現実システム、マーカ端末、撮影端末、拡張現実方法、ならびに、情報記録媒体
【課題】拡張現実画像において、現実世界の様子を表す画像に合成されるオブジェクト画像を適切に変化させる。
【解決手段】マーカ端末211において、符号化部212は、伝達すべき情報を、図形コードの列に符号化する。マーカ生成部213は、図形コードのそれぞれに基準画像を合成したマーカ画像を生成する。マーカ表示部214は、生成されたマーカ画像を表示する。撮影端末231において、撮影部232は、現実世界を撮影する。マーカ認識部233は、撮影画像からマーカ画像を認識する。復号部234は、順次認識されたマーカ画像から図形コードの列を得て、伝達された情報を復号する。画像生成部235は、伝達された情報にオブジェクト画像を生成して、撮影画像を背景としてオブジェクト画像を合成し、拡張現実画像を生成する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】ユーザの視野内に対してAR技術を用いて情報を重ね合わせてHMDによって表示する形態においてユーザによる操作の入力を簡便化する。
【解決手段】画像処理装置100は、環境マップに基づいて、入力画像内に写っている物体のうち所定の平面または曲面を有する物体の位置を決定する重畳表示位置決定部と、重畳表示位置決定部により決定された物体の位置に重畳表示データを設定することで重畳表示画像を生成する重畳表示画像生成部と、ユーザの視野内に重畳表示画像を重畳する画像重畳部と、入力画像内に写っている操作体を認識する操作体認識部と、操作体認識部により認識された操作体の位置に基づいて選択される項目に応じた処理を実行する処理実行部と、を備える。
(もっと読む)
設計支援システムおよび設計支援プログラム
【課題】図形要素の形状を容易に制御することができるシステム等を提供する。
【解決手段】本発明の設計支援システム100によれば、ユーザにより与えられた変形指示にしたがいながらも自由度がある変形条件にしたがって図形要素が変形される。この結果、変形指示そのものが制限されることはないため、少なくともその分だけ容易に図形要素の形状が制御されうる。また、変形条件に自由度があるため、設計上無理のある補正図形要素が作成される可能性を低減しながら図形要素の形状が制御されうる。
(もっと読む)
画像検索システム
【課題】オブジェクトの内容やレイアウトを考慮した画像検索を行う。
【解決手段】入力された検索キーワードにもとづいて、オブジェクト情報データを参照して前記検索キーワードに関連するオブジェクト画像を取得し、前記オブジェクト情報データに含まれるオブジェクト画像のサイズ及び位置情報をもとに、オブジェクト画像のレイアウトを推定し、オブジェクト画像が頻出する位置にオブジェクト画像を配置した合成画像を生成し、合成画像をクエリ画像として検索対象の画像を検索することで、キーワードを入力とした画像検索を実現する。
(もっと読む)
ゲームプログラム、ゲーム装置、ゲーム制御方法
【課題】現実世界において、ある事象に対して選手が受ける意識の影響を再現できるゲームを、提供することにある。
【解決手段】本プログラムでは、まず、第2領域MCが画像表示部3に表示される。次に、第1キャラクタから送出された移動体BBの到達位置M1が、認識される。そして、第1領域70上の到達位置M1に対応する、第2領域MCの内部の部分領域が、第1対応部分領域TB1として認識される。また、第1領域70において到達位置M1に相対する相対位置に対応する、第2領域MCの内部の部分領域が、第2対応部分領域TB2として認識される。すると、第1対応部分領域TB1が拡大され、第2対応部分領域TB2が縮小される。そして、これら領域TB1,TB2の形態変更に応じて、第2領域MCの全体の形態が補正される。そして、補正後の第2領域MCが、画像表示部3に表示される。
(もっと読む)
画像管理装置、画像管理方法およびプログラム
【課題】 キーワード入力を必要とせずに画像の検索を行う。
【解決手段】 画像管理装置(2)は、複数の画像を蓄積する画像蓄積手段(25)と、蓄積された各画像の撮影日時や撮影場所および撮影元を含む撮影情報を記憶する撮影情報記憶手段(26)と、複数の画像を含む基準画像を検索条件とし、この基準画像と同じグループに属する複数画像を検索するグルーピング検索の要求を受信する検索要求受信手段(20)と、グルーピング検索の要求があった場合に撮影情報記憶手段に記憶されている撮影情報の中から、検索条件として指定された基準画像に含まれる複数の画像の撮影情報に対して所定の類似性を持ち、かつ、撮影元が同じであるものを検索する撮影情報検索手段(21)と、撮影情報検索手段により検索された撮影情報に対応した複数の画像を蓄積手段から読み出す画像読み出し手段(21)とを備える。
(もっと読む)
パーツカタログ作成装置、パーツカタログ作成方法及びパーツカタログ作成プログラム
【課題】モデルの全体形状を把握しつつ内部に組みつけられたパーツを容易に選択させることが可能なパーツカタログ作成装置、パーツカタログ作成方法及びパーツカタログ作成プログラムを提供することを目的としている。
【解決手段】三次元空間上における視線方向を示すパラメータを取得する視線方向パラメータ取得手段と、前記視線方向と直行する視野平面に前記三次元モデル画像を投影させた二次元画像において、前記複数の前記パーツの面積を算出する面積算出手段と、前記面積の大きい前記パーツから順に、所定条件に基づき前記パーツを選別するパーツ選別手段と、を有する。
(もっと読む)
情報処理装置、情報処理方法およびプログラム
【課題】現実空間を解析して認識される仮想空間に現実空間の重力方向を反映する。
【解決手段】情報処理装置10は、現実空間の3次元空間構造を解析して仮想空間を認識する仮想空間認識部152と、前記仮想空間に配置するオブジェクトを記憶している記憶部158と、前記仮想空間に配置された前記オブジェクトを表示装置に表示させる表示部154と、現実空間の重力方向を検出する重力方向検出部156と、前記検出部により検出された前記重力方向を前記仮想空間に反映させる重力方向反映部162と、を備える。
(もっと読む)
仮想物体を現実の物理物体に変換する方法
情報処理装置および情報処理装置の制御方法
【課題】 操作者の負担を軽減させつつ、複雑なロボットシステムの構成部材を適切に配置すること
【解決手段】 撮像手段を有し、当該撮像手段の撮像画像に基づき作業を行うロボットシステムの構成部材の配置を設定するための情報処理装置であって、
前記ロボットシステムの作業空間に対応する仮想空間に、前記構成部材に対応する仮想物体を配置する配置手段と、前記撮像画像に対応する、前記仮想物体が配置された前記仮想空間の仮想空間画像を取得する第一の取得手段と、前記仮想空間画像に基づき、前記ロボットシステムの作業に対する前記仮想物体の配置の適合を示す評価値を取得する第二の取得手段とを有することを特徴とする。
(もっと読む)
画像レイアウト編集装置及びその制御方法
【課題】 見開きページ上に配置される画像のレイアウトを簡単な操作で変更できるようにすること。
【解決手段】 画像レイアウト編集装置は、見開きページ上の画像をプレビュー表示するための画面201を表示する。画面201には、プレビュー表示画面201の見開きページ一覧202に見開きページ上の画像が表示されるとともに、レイアウト候補表示領域203に見開きページ上の画像のレイアウトパターンを指定するための複数のアイコンが表示される。レイアウト候補表示領域203に表示された複数のアイコンのうちのいずれか1つを選択し見開きページ一覧202に表示された見開きページ上の画像に移動する操作が行われると、当該移動されたアイコンに対応するレイアウトパターンに従い当該移動先の見開きページ上の画像のレイアウトが変更される。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】キャラクタがオブジェクトに触る様子を表す画像を生成することが可能なゲーム装置を提供すること。
【解決手段】仮位置/方向取得手段(52)は、オブジェクトに触るために用いられるキャラクタの部位の仮位置、又はキャラクタ本体から部位への仮方向を取得する。線取得手段(54)は、仮位置又は仮方向に基づいて、キャラクタの代表点からオブジェクトに向けて伸びる少なくとも3本の線を取得する。交点取得手段(56)は、少なくとも3本の線の各々とオブジェクトとの交点を取得する。キャラクタ制御手段(58)は、交点取得手段(56)によって取得される少なくとも3つの交点を含む面に基づいて、キャラクタの前記部位の位置を制御する。画像生成手段(60)は、仮想空間に設定された視点から見たキャラクタ及びオブジェクトを表す画像を生成する。
(もっと読む)
拡張現実における動的モデリングによる頑強なオブジェクト認識
動的モデリングに基づいて、頑強なオブジェクト認識方式を提供するための技術が一般に説明される。セル状領域をより高次のエンティティグループグループ化するために、セル状領域の微小スケールの時間的構造内の相関を用いることが可能である。これらのエンティティは、リッチな構造を表し、ハイレベルなオブジェクトを符号化するために使用可能である。オブジェクト認識は、弾性グラフマッチングとしてフォーマット可能である。 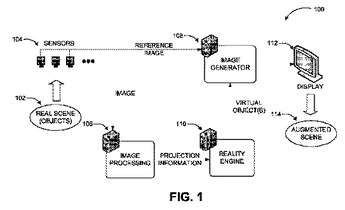 (もっと読む)
(もっと読む)
画像合成システム
【課題】本願発明の課題は、例えば工事完成後の景観を視覚的にイメージできる合成画像を作成するシステムであって、計画された構造物等の寸法、形状、あるいは配置位置の変更にも容易かつ柔軟に対応できる画像合成システムを提供することにある。
【解決手段】本願発明の画像合成システムは、実写画像を表示する表示手段と、一又は二種類以上の描画物を記憶するとともに、それぞれの代表寸法及び代表形状を記憶する描画物モデル記憶手段と、描画物の種類を選択する描画物選択手段と、表示された実写画像上に描画物を配置するための基準となる配置基準位置を指定する基準位置指定手段と、描画物選択手段で選択された描画物の種類と、その代表寸法及び代表形状と、基準位置指定手段で指定された配置基準位置と、に基づき、実写画像上の対象物の遠近に応じて、表示された実写画像上に描画物を作図する合成画像作図手段と、を備えたものである。
(もっと読む)
ボトリング製品検索装置
【課題】特定の規約に基づくIDコードの設定等を行うことなく製品検索ができるボトリング製品検索装置を提供する。
【解決手段】ボトリング製品のラベル貼付部をカメラにより撮影したカメラ撮影画像から対象ボトリング製品を検索するボトリング製品検索装置であって、ラベルのボトル貼付面への中心投影画像に外接する矩形枠を所定のアスペクト比に座標変換して正規化したインデックス画像をボトリング製品の属性に関連付けて格納するデータ格納部と、前記カメラ撮影画像から抽出したラベル画像に外接する矩形枠を座標変換して前記インデックス画像のアスペクト比に一致させる画像変換部6と、画像変換部6での出力画像をインデックス画像中から検索して撮影したボトリング製品を特定する検索部7と、を有する。
(もっと読む)
161 - 180 / 899
[ Back to top ]