
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
1,921 - 1,940 / 2,648
道路画像解析装置及び道路画像解析方法
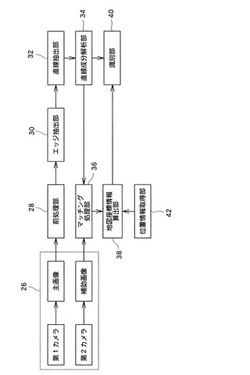
【課題】道路標示とガードレールとを明確かつ高速に区別することができ、正確な位置情報を取得できる道路画像解析装置及び道路画像解析方法を提供する。
【解決手段】撮像部26が取得した主画像データに対して前処理部28がサブエリアを設定し、エッジ抽出部30がサブエリア毎にエッジ成分を抽出する。直線抽出部32は、上記抽出されたエッジ成分を解析して直線成分を抽出し、この直線成分を使用して直線成分解析部34が直線成分の中から連続成分を抽出する。マッチング処理部36は、上記連続成分の頂点と補助画像データとのマッチング処理を行い、各連続成分の3次元位置情報を取得する。識別部40は、3次元位置情報に含まれる各連続成分の高さ情報に基づき、連続成分が道路標示かガードレールかを識別する。
(もっと読む)
周辺状況認識装置及び方法

【課題】画像認識を用いて自車両の進行方向に存在する交差点の通行に影響を与える障害物を認識する場合において、当該認識対象としての障害物の形状や色彩等の様々な違いによる影響、或いは周辺に存在するノイズ成分となり得るものの影響を受け難く、安定的に障害物の認識が可能な周辺状況認識装置及び周辺状況認識方法を、比較的簡易な構成により実現する。
【解決手段】地物情報に基づいて画像情報Gに含まれているべき地物fについて、当該地物fの全部又は一部の画像が画像認識手段により認識できない場合に、交差点の通行に影響を与える障害物Bが存在すると認識する。
(もっと読む)
車線認識装置
【課題】破線状に標示された車線の標示部分が撮像画像上に撮像されていなくても車線位置を的確に推定し安定して車線認識を行うことが可能な車線認識装置を提供する。
【解決手段】車線認識装置1は、前方の道路を含む風景を撮像して画素ごとに輝度値p1ijを有する一対の画像を出力する撮像手段2と、撮像された一対の画像に基づいて少なくとも一方の画像Tの各画素について実空間における距離Lijを算出する画像処理手段6と、輝度値および距離の情報に基づいて一方の画像Tから車線候補点Sを検出して車線候補点Sに基づいて車線位置LR、LLを検出する検出手段9とを備え、検出手段9は、距離の情報に基づいて車線候補点Sを実空間上の座標に変換し、自車両の挙動により画像T中に見出されなくなった過去の車線候補点Saの実空間上の座標を自車両の挙動に基づいて更新して記録し、少なくとも過去の車線候補点Saの座標に基づいて車線位置を検出する。
(もっと読む)
車両検出装置及び車両検出方法
【課題】車両検出を行うための閾値の設定に手間がかからず、何らかの外乱が発生しても車両候補を確実に検出することができる車両検出装置を提供する。
【解決手段】逐次画像を撮像し現画像として入力する現画像入力手段1と、複数の現画像に基づいて背景画像を作成する背景画像作成手段2と、現画像および背景画像に基づく差分画像から特徴のある領域を有する車両候補領域を検出する外接矩形検出手段5と、特徴のある領域を車両として認識する車両認識手段6と、認識車両を車両であると確定する車両確定手段8とを有し、車両確定手段8は、車両候補領域における分散値を示す現分散値を算出し、複数の現画像の車両候補領域における分散値に基づいて分散閾値を算出し、現分散値と分散閾値との比較を行った結果、現分散値が分散閾値より大きい場合に認識車両を車両であると確定する。
(もっと読む)
運転支援方法及び運転支援装置
【課題】車両状況又は路面状況によらず、良好な画質の駐車支援画像を表示することができる運転支援方法及び運転支援装置を提供する。
【解決手段】駐車支援ユニット2は、車両に設けられたカメラ30の基準姿勢に対する傾きを検出し、カメラ30から取得した画像データに対し、カメラ30の傾きを補正する処理を行って合成データを生成し、合成データに基づく駐車支援画像をディスプレイ22に出力する。
(もっと読む)
視認不可能領域抽出装置、及び視覚支援装置
【課題】1台のカメラでドライバの視野における視認性を高めることを可能とする視覚支援装置、及び視覚支援装置に供される視認不可能領域抽出装置を提供する。
【解決手段】可視光カットフィルタと近赤外光カットフィルタとが交互に配置されたフィルタを介して被写体を撮像し、該被写体を示す画像データを生成し、生成された前記画像データから、前記可視光カットフィルタを介して取得された赤外光画像データを生成し、前記画像データから、前記近赤外光カットフィルタを介して取得された可視光画像データを生成し、前記可視光画像データと、前記赤外光画像データとから、可視光輝度が第1の閾値未満であって、赤外光輝度が第2の閾値以上である画素を視認不可能領域として抽出する。
(もっと読む)
車線位置検出装置
【課題】自車輌の前方風景の撮像画像中から自車輌の左右に標示されている車線や破線を的確に検出し、車線の位置を確実に検出することが可能な車線位置検出装置を提供する。
【解決手段】車線位置検出装置1は、前方風景を撮像して一対の画像を出力する撮像手段2と、一方の画像Tの設定領域ごとに実空間での距離Lijを算出する画像処理手段6と、画像T上を探索して輝度値p1ijと距離Lijに基づいて、道路面上にある画素の中から輝度値と輝度微分値の閾値pth1、Eth1以上の画素を車線候補点として検出し、車線候補点に基づいて車線位置LR、LLを検出する検出手段9とを備え、検出手段9は、所定距離内にある車線候補点をグループ化し、車線候補点のグループが所定個数以上検出され、各グループの実空間上における距離方向の長さ等がそれぞれ所定の数値範囲内にある場合には、それらのグループを道路面上に標示された破線BLとして検出する。
(もっと読む)
自影判定方法
【課題】移動体に設置されたカメラによって撮像された撮像画像内に存在する影の中から、移動体の影(自影)を判定する。
【解決手段】例えば、車両やロボットなどの移動体に設置されたカメラ(撮像装置)11で撮像された撮像画像が影認識装置12に供給され、撮像画像内に写っている影の認識が行われる。影認識装置による影認識結果は自影判定装置13に供給され、自影判定装置13において、撮像画像内に複数存在する影の塊の中から移動体の影(自影)が特定される。自影判定装置13で特定された自影に係る情報は影補正装置14に供給され、影補正装置14において、例えば撮像画像内における自影の影響が少なくなるように、撮像画像の補正(改善)が行われる。これにより、自影の影響で見えにくかった撮像画像の自影領域の画質が改善される。
(もっと読む)
車載カメラのキャリブレーションシステム
【課題】車載カメラのキャリブレーションシステムにおいて、自動操作によってパラメータを調整することができるものとする。
【解決手段】車両200の上方に設置されて、車両200の周囲にマーカM(指標)を投影するプロジェクタ10と、マーカMおよび車両200を撮影する位置検出用カメラ20(上方カメラ)と、車載カメラ210で撮影された第1画像座標系におけるマーカMの位置と実空間座標系(ワールド座標系)におけるマーカMの位置との対応関係に基づいて、車載カメラ210の設置パラメータをキャリブレーション処理する演算処理専用コンピュータ30(演算手段)と、得られた実際の設置パラメータを記憶媒体に記憶させる記憶装置50(記憶手段)と、車載カメラ210の映像を無線送受信する2つの無線電送装置60,70(第1の無線伝送手段、第2の無線伝送手段)とを備える。
(もっと読む)
運転支援装置
【課題】この発明は、入力画像に対してレンズ歪み補正を行なう場合に、入力画像を複数の領域に分け、各領域別に歪み補正強度を変えることができる運転支援装置を提供することを目的とする。
【解決手段】車体に搭載されかつ車体の周辺領域を撮像する撮像装置、撮像装置によって撮像された入力画像に対してレンズ歪み補正を行なうレンズ歪み補正手段、およびレンズ歪み補正手段によって得られた画像を表示するための表示器を備えており、レンズ歪み補正手段は、入力画像を複数の領域に分け、領域毎に異なる歪み補正強度でレンズ歪み補正を行なうものである。
(もっと読む)
画像処理装置及びプログラム
【課題】Uターンのような大きな旋回を行う場合や、その場で転回が可能な特殊な車両がその場で転回を行うような場合であっても、どの程度転回したかを容易に把握することができる画像処理装置等を提供する。
【解決手段】自車両画像のみが自車両の移動に伴って移動し、周辺画像の構図は変化しない画像を出力する。このようになっていれば、ユーザは、従来のように周辺画像中の特徴点を抽出して覚えておく必要はなく、この特徴点よりも覚えやすい自車両の初期位置だけを覚えておき、転回後(又は転回中)に自車両の初期位置と現在位置とを比較することによって自車両の転回具合を把握することができる。
(もっと読む)
走行目標点設定装置、車線追従支援装置および車線逸脱防止装置
【課題】車両の逸脱回避制御や車線追従制御において基準となる走行目標点を的確に設定可能で、しかも自車両が走行レーン内を滑らかに安定性良く走行できるように走行目標点を設定可能な走行目標点設定装置を提供する。
【解決手段】走行目標点設定装置1は、自車両の左右に車線位置LR、LLを検出する車線検出手段2と、車線位置LR、LLからオフセット距離Ror、Rolだけ内側に離間した位置に左右のオフセット位置OR、OLを設定し、両方のオフセット位置の間を走行目標点設定範囲LIMとして設定する範囲設定手段3と、自車両の挙動が所定の目標挙動になるように算出した走行目標点設定位置に走行目標点GPを設定する走行目標点設定手段4とを備え、走行目標点設定手段4は、走行目標点設定位置が走行目標点設定範囲LIM外に位置する場合は、走行目標点設定位置を走行目標点設定範囲内に補正する。
(もっと読む)
車両周辺画像提供装置および方法
【課題】車両周辺の立体物の有無を判定することが可能な車両周辺画像提供装置および方法を提供する。
【解決手段】車両周辺画像提供装置1は、画像検出部54によって俯瞰画像データ上に特徴点を設定し、この特徴点の移動量と自車両の変化とから特徴点が立体物上に設定されているか否かを判断する。ここで、自車両が移動した場合、特徴点が移動することとなる。この特徴点の移動による変化は、特徴点が基準面である地面上に存在する場合と、特徴点が立体物Oに設定されている場合とで異なる。このため、特徴点の変化によって特徴点が立体物上に設定されているかを判断することができる。
(もっと読む)
車両用方向者検出装置
【課題】昼間であっても、遠赤外線による歩行者の検出精度の向上を図ることができる車両用歩行者検出装置の提供。
【解決手段】車両に搭載された車両用歩行者検出装置であって、車外の遠赤外線画像を撮像する遠赤外線カメラ1と、撮像された遠赤外線画像から歩行者像を含むの可能性がある候補領域を抽出する候補領域抽出部61と、遠赤外線画像に影響を与える車外環境を検出する車外環境検出手段3と、遠赤外線画像の歩行者モデルを車外環境状況と対応付けて記憶したROM4と、車外環境検出手段3によって検出された車外環境に対応する歩行者モデルを、ROM4から抽出する歩行者モデル抽出部62と、候補領域抽出部61によって抽出された候補領域と、歩行者モデル抽出部62によって抽出された歩行者モデルとを対比して、候補領域が歩行者像を含むか否かを判定することにより、歩行者を検出する歩行者判定部63とを備える。
(もっと読む)
車両検出装置及び車両検出方法
【課題】ヘッドライトによる路面反射が1つになり広がってしまった場合でも、正確に車両の車頭及び車尾を検出することができる車両検出装置を提供する。
【解決手段】現画像を入力する現画像入力手段11と、背景画像を作成する背景画像作成手段2と、差分画像を作成する差分画像作成手段3と、路面反射領域を検出する路面反射認識手段8と、差分画像から路面反射領域を除いた新差分画像から特徴のある領域を有する車両候補領域を検出する外接矩形検出手段5と、特徴のある領域を車両として認識する車両認識手段6とを有し、路面反射認識手段8は、輝度算出領域毎に輝度を算出し、最大輝度に基づいて輝度閾値を算出し、輝度閾値を上回った輝度を有する輝度算出領域が位置的に連続することで構成する路面反射候補領域の面積が所定値より大きい場合に、路面反射候補領域を路面反射領域として検出する。
(もっと読む)
周辺状況認識装置及び方法
【課題】画像認識を用いて自車両周辺に存在する障害物を認識する場合において、当該認識対象としての障害物の形状や色彩等の様々な違いによる影響、或いは周辺に存在するノイズ成分となり得るものの影響を受け難く、安定的に障害物の認識が可能な周辺状況認識装置及び周辺状況認識方法を、比較的簡易な構成により実現する。
【解決手段】地物情報に基づいて画像情報Gに含まれているべき地物fについて、当該地物fの全部又は一部の画像が画像認識手段により認識できない場合に、自車両Caと当該地物fとの間に障害物Bが存在すると認識する。
(もっと読む)
車線検出装置
【課題】横断歩道等の車線位置検出に不要な幅広の標示は適切に排除し、必要な幅広の車線や標示は検出して的確に車線位置を検出することが可能な車線検出装置を提供する。
【解決手段】車線検出装置1は、自車両前方を撮像して画素ごとに輝度値p1ijを有する一対の画像を出力する撮像手段2と、一方の画像Tの各画素について実空間における距離Lijを算出する画像処理手段6と、画像Tにおける輝度値と距離に基づいて車線の一方のエッジ部分に対応する画素を車線候補点として検出し、検出した車線候補点に基づいて車線位置LR、LLを検出する検出手段9とを備え、検出手段9は車線候補点と車線の反対側のエッジ部分との実空間上の距離を算出し、その距離が検出車線幅閾値Wthd以下の場合にのみその車線候補点を車線位置の検出に用いる。また、検出車線幅閾値Wthdは自車両の走行環境または道路環境により可変とされている。
(もっと読む)
フロントガラスの範囲検出装置、方法及びプログラム
【課題】一台のカメラと簡単な構成の計測部を用いてフロントガラスの範囲を判定する。
【解決手段】物体が移動する場所を俯瞰するカメラにより、当該場所を周期的に撮影し、撮影した画像内に走行車両が検出された場合に、その走行車両の画像に表れる、走行車両の進行方向に垂直な走行車両の特徴ラインを検出し、前記特徴ラインを画面上で追跡することにより、当該特徴ラインの高さを算出する。これらの特徴ラインの高さ情報を用いて、フロントガラス上端及び下端となる特徴ライン位置を特定する。
(もっと読む)
道路標識データベース構築装置
【課題】撮影環境の変化や類似物が存在しても、道路標識を正確に識別し、データベースかできる道路標識データベース構築装置を提供する。
【解決手段】ステレオ画像取得部34が取得したステレオ画像を色分割部36が所定の色毎に分割して2値化画像を生成する。また、エッジ抽出部38は、上記ステレオ画像から、輝度等が大きく変化するエッジ部分を抽出してエッジ画像を生成する。差分処理部40は、上記2値化画像とエッジ画像との差分を演算して差分画像を生成する。画像解析部42は、上記2値化画像及び差分画像から道路標識に使用されている円、三角形、四角形などの形状や、その形状の中に描かれたパターンを抽出し、これと道路標識のパターン及び形状とマッチングして道路標識画像を決定する。
(もっと読む)
3次元座標取得装置
【課題】複眼ステレオと単眼ステレオの技術を融合して利用する3次元座標取得装置の提供
【解決手段】 車両に搭載され、所定の設置距離で配置された、少なくとも2台のカメラを有し、該少なくとも2台のカメラで取得された複数の画像を用いて、該車両周辺の物標の3次元座標を推定取得する装置において、少なくとも2台のカメラの内の1台のカメラが経時的に取得した2枚の画像から、車両周辺の物標の3次元座標を推定演算する単眼ステレオ処理部、少なくとも2台のカメラの内の2台のカメラが同時に取得した2枚の画像から、車両周辺の物標の3次元座標を推定演算する複眼ステレオ処理部、それら単眼ステレオ処理部及び複眼ステレオ処理部に接続され、それら処理部でそれぞれ演算推定された物標の3次元座標を、所定の基準で選択、統合して、求めるべき前記物標の3次元座標と推定し、その結果を出力する、結果統合・切替手段、を有する。
(もっと読む)
1,921 - 1,940 / 2,648
[ Back to top ]