
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
1,961 - 1,980 / 2,648
車両用画像表示装置および画像合成方法

【課題】 車両に設置された複数の撮像カメラの撮像画像を合成表示する車載用画像表示装置において、障害物を表示する際、表示画像上で違和感が生じないようにする。
【解決手段】 出力制御部8はハンドル舵角検出部6より検出されるハンドル舵角と車両情報記憶部7に記憶される車両情報とに基づいて車両の進行予測軌跡を算出し、この進行予測軌跡に基づき画像境界線を設定し、撮像カメラ画像の撮像画像を合成し、ディスプレイ9で表示する。
(もっと読む)
移動体検出装置および移動体検出方法

【課題】自車両前方の画像を処理して特徴点を抽出し、抽出した特徴点を示す画素の移動情報および位置に基づいて移動体を検出するとともに、移動体の幅および他の移動体との位置関係に基づいて移動体の中から歩行者を検出する移動体検出装置および移動体検出方法を提案する。
【解決手段】撮像部101で撮像した自車両前方の画像から特徴点を抽出する特徴点抽出部103と、特徴点を表す画素の画像上の移動速度および移動方向を移動情報として算出する移動情報算出部105と、画素の位置を所定の範囲の俯瞰座標における位置に変換する座標変換部104と、変換後の画素の位置および移動情報に基づいて特徴点を平面物、立体物、移動体と判定する物体属性判定部107と、移動体の場合は特徴点の幅および他の移動体との位置関係に基づいて歩行者かどうかを判定する移動体識別部108とを備える制御部100を備える。
(もっと読む)
物体検知装置
【課題】ユーザが直感的かつ簡単な操作で物体検知領域の設定をすることが可能なインタフェースを用いて、物体検知装置の性能向上を行うこと。
【解決手段】撮像を行い撮像した画像を出力する撮像手段と、3次元位置を検出し3次元位置情報を出力する3次元位置検出手段と、ユーザが検知領域を設定するための検知領域設定用データの入力を行うユーザ入力手段と、画像に変換処理を行って、生成した画像を出力する画像処理手段と、を有する物体検知装置によって構成される。ユーザが入力した検知領域設定用データを用いて検知領域を3次元空間中で決定し、3次元位置検出手段によって検出した3次元位置が検知領域の内部にあるか外部にあるかを判定し、その結果に基づいて、撮像手段から出力した画像に変換処理を加えることで、画像上に検知領域を明示する。これにより、物体検知装置において、ユーザが検知領域を設定する際の操作性の向上を図ることが可能となる。
(もっと読む)
カメラの姿勢変化の検知方法及びその装置
【課題】静止部に固定的に設置されたカメラにより撮像された画像を処理して何らかを情報を得る場合にその情報の精度の低下を招くような事態を比較的簡単な処理で精度良く安定して検知する。
【解決手段】姿勢変化検知装置4は、静止部に固定的に設置されたカメラ1により撮像された画像のうちの所定領域の画像信号に基づいて、前記所定領域内の直線をハフ変換処理により検出する。姿勢変化検知装置4は、前記検出された直線を示すパラメータρ,θに基づいて、カメラ1の姿勢変化の有無を判定する。
(もっと読む)
表示装置および方法、並びにプログラム
【課題】運転者の安全を確保するとともに、より確実にメッセージを通知する。
【解決手段】表示情報生成部72は、運転者に通知すべきメッセージである表示情報を生成する。視線検出部73は、撮像部34により撮影された運転者の顔の画像に基づいて、運転者の視線の方向を検出する。表示選択部74は、視線の方向の検出結果に基づいて、複数の表示部31のうち運転者が視線を向けている表示部31を、表示情報を表示させる表示部31として選択する。本発明は、車両に設置される表示装置に適用することができる。
(もっと読む)
画像認識装置
【課題】 自転車や二輪車およびそれらの乗員と歩行者との判別精度を向上させた画像認識装置を提供する。
【解決手段】 カメラで取得した画像Im(t1)(ステップS1)と過去画像Im(t2)(ステップS3)から、オプティカルフローを算出する等して対象物の移動速度を求める(ステップS7〜S23)。求めた対象物の移動速度に応じて認識辞書を設定し(ステップS25)、設定した認識辞書を用いてパターンマッチングを行うことで物体認識を行う(ステップS27)。このため、速度領域の異なる対象物と誤認識するケースを効果的に抑制できる。
(もっと読む)
画像処理装置
【課題】動画像中からの特定対象の抽出の成否やノイズの検出に起因する画像上のちらつきを低減し、動画像中から安定して特定対象を抽出することが可能な画像処理装置を提供する。
【解決手段】画像処理装置1は、移動体に搭載され移動体の周囲を撮像する撮像装置21と、処理プログラムに基づいて撮像装置21により時間間隔をおいて撮像された複数枚の画像Iに画像処理を施して画像中から特定の対象Pを抽出し特定の対象Pが抽出された出力画像Oを形成する画像処理部3と、画像処理部3から出力された現在から所定フレーム前までの出力画像Oの各画素の輝度値を重み付けして重ね合わせて結果画像Rを形成する重ね合わせ処理部4とを備え、重ね合わせ処理部4は、移動体の移動状態に基づいて出力画像Oの重ね合わせの条件を決定する。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】車両の乗員に対して移動体の存在を早期に認知させることのできる画像処理装置及びプログラムを提供する。
【解決手段】車両の後退走行中(S101:YES)、後方の撮影画像を座標変換して鳥瞰画像を生成し(S102)、生成した鳥瞰画像に、その鳥瞰画像よりも前の時点での撮影画像に基づき生成した鳥瞰画像である履歴画像を合成した周辺画像を生成する(S103)。また、車両の周辺に歩行者等の移動体が存在するか否かを判定し(S104)、移動体が存在すると判定した場合には(S104:YES)、移動体の存在を示唆する移動体画像を周辺画像に重畳する(S105)。こうして生成した画像を、表示用画像として出力する(S106)。
(もっと読む)
障害物追跡装置及びその方法
【課題】検出された障害物候補領域に対してあいまい性を考慮して、障害物の正確な位置を検出する障害物追跡装置を提供する。
【解決手段】移動体に搭載されて障害物に関する時系列画像を取り込む画像入力部1と、時系列画像から現時刻の障害物候補領域を検出する障害物検出部2と、障害物の前時刻に関する状態仮説群を保持し、また、障害物候補領域の位置毎の観測仮説と障害物が検出されなかったとする観測仮説を合わせた観測仮説群を生成する仮説生成部3と、状態仮説群と観測仮説群との組み合わせ毎の尤度をそれぞれ計算し、まつ、尤度が最大になる観測仮説群と状態仮説群の組み合わせを選択し、この選択した状態仮説群を現在時刻の状態仮説群として更新する尤度計算部5と、現在時刻の状態仮説群の中で前記尤度が最大となる状態仮説を障害物の検出した状態とする仮説選択部6とを具備する。
(もっと読む)
警報装置
【課題】相手車両の運転者が自身に気付いているか否かを判断することによって安全に走行することができる警報装置を提供する。
【解決手段】運転者を撮像する撮像手段101と、運転者の視線方向を検出する視線検出手段102と、視線方向が複数に区分けされた範囲のいずれの区分け範囲に属するかを決定する視線範囲決定手段103と、車両の車両情報を取得する車両情報取得手段104と、決定された区分け範囲の情報と車両の車両情報を発信する発信手段105と、他の車両の運転者における視線方向の区分け範囲の情報及び他の車両の車両情報を受信する受信手段106と、車両の車両情報と他の車両の車両情報に基づき、車両に対する他の車両の方向を算出する方向算出手段107と、その方向が他の車両の運転者における視線方向の区分け範囲内にあるか否かを判断する判断手段108と、判断結果に基づき車両の運転者に警報を行う警報手段109とを備える。
(もっと読む)
監視装置および方法、画像処理装置および方法、並びにプログラム
【課題】監視の対象となるものの周囲の状況をより正確に把握できるようにする。
【解決手段】監視装置11は、監視の対象となるものに接近する接近者を検出し、接近者を特定する個人ID、姿勢を示す姿勢情報、接近者のものに対する位置を示す位置情報、および接近者の行為を示す行為情報からなる検出データを、センタ装置12を介して端末装置13に送信する。端末装置13は、受信した検出データに基づいて、監視の対象となるものおよび接近者の通知画像を生成して表示する。本発明は、車両を監視する監視装置に適用することができる。
(もっと読む)
車両管理装置
【課題】車両の使用者がコンタクトレンズを装着しているかを確実に識別することを可能とする車両使用管理装置を提供する。
【解決手段】カード読込み書込み部11は、電子運転免許証2から車両運転の条件を示す運転条件情報を取得する。目画像取得部12aは、車両使用希望者の目画像を撮影して目画像データを取得し、顔画像取得部12bは、車両使用希望者の少なくとも目周辺の顔画像を撮影して目周辺の顔画像データを取得する。制御部14は、目画像データから抽出した虹彩情報と、記憶部13に記憶された虹彩情報との対比処理を含む使用者認証処理と、運転条件情報に基づく運転可否判別処理と、目画像データに基づいて車両使用希望者がコンタクトレンズを装着しているかどうかを識別するコンタクトレンズ識別処理を行う。コンタクトレンズ識別処理は、目画像データから円形エッジを抽出し、抽出した円形エッジの数及び大きさに基づいてコンタクトレンズの装着を識別する。
(もっと読む)
画像処理装置および方法、記録媒体、並びに、プログラム
【課題】画像内の光源、または、光源からの光の正反射光が写っている領域を簡単かつ正確に検出する。
【解決手段】輝度変化検出部131は、撮像装置111により撮像された入力画像において、水平方向の行および垂直方向の列ごとに、隣接する画素間の輝度の変化が所定の大きさ以上となる位置を検出する。領域検出部132は、輝度変化検出部131により検出された位置および入力画像の端部により区分される領域のうち、隣接する領域と比較して輝度が高い領域に含まれる画素により構成される領域を、光源、または、光源からの光の正反射光が入力画像に写っている領域として検出する。本発明は、画像の階調を変換する画像変換装置に適用できる。
(もっと読む)
画像認識装置、車両制御装置、画像認識方法および車両制御方法
【課題】危険度の高い歩行者との距離を優先して算出し、警告や車両制御の実行タイミングを早期化すること。
【解決手段】カメラ31が撮影し、前処理部11による処理が施された入力画像から歩行者認識部18が歩行者認識を行なうとともに、優先度設定部19aが画像内における歩行者像のサイズや位置、移動状態に基づいて優先度を設定する。算出順序決定部19bは、優先度の高い歩行者から順に距離を算出するように算出処理部19cによる距離算出の処理順序を決定する。
(もっと読む)
車両周辺視認装置
【課題】重要な情報を含む車両近辺の映像の画質の劣化を最小限に抑えながら、車両遠方の映像の画質劣化を改善することにより、最適な画像品質を実現することができる車両周辺視認装置を提供すること。
【解決手段】車両周辺を撮像可能に車両に取り付けられた撮像手段(カメラ10)と、前記撮像手段(カメラ10)により撮像された映像を俯瞰変換処理して俯瞰画像とする俯瞰変換処理手段(俯瞰変換装置11)と、前記俯瞰変換処理手段(俯瞰変換装置11)により俯瞰変換された俯瞰画像をフィルタ処理する画質改善フィルタ(12)と、前記画質改善フィルタ(12)によりフィルタ処理された画像を映し出すモニター(13)を備えている。しかも、前記画質改善フィルタ(12)は、前記俯瞰画像の画素を車両近辺から車両遠方に向かうに従ってフィルタ処理の強さを順次大きくするように設定されている。
(もっと読む)
移動物体検出装置および移動物体検出方法
【課題】特定の移動物体がカメラの視野内で長時間にわたって停止したような場合であっても、移動物体を正しく検出することが可能な移動物体検出装置を提供する。
【解決手段】現画像入力部10と、背景画像作成部30と、差分画像作成部51と、移動物体を認識する車両認識部54と、停止物体を認識する停止車両認識部56と、第1の停止物体が認識された後、第2の停止物体もしくは移動物体と第1の停止物体との間の距離が所定距離よりも近い場合、両者は同一であると認識する同一性認識部とを有し、背景画像作成部30は、第1の停止物体が認識された場合、第1の停止物体を含む領域を有する現画像の領域を背景画像中に取り込むことで更新済み背景画像を作成し、同一性認識部によって同一であると認識された場合、更新済み背景画像の領域を現画像もしくは背景画像に基づいて復元する。
(もっと読む)
情報処理装置および方法、記録媒体、並びに、プログラム
【課題】ドライバが運転中に正面を向いている場合の顔の向きを迅速かつ確実に検出する。
【解決手段】顔検出部12は、カメラ11により運転席に座っているドライバを撮影した画像である入力画像におけるドライバの顔の位置を検出する。イニシャル方向検出部13は、入力画像におけるドライバの顔の位置と、ドライバが運転中に正面を向いている場合の顔の向きであるイニシャル方向とが予め関連づけられている変換テーブルを記憶部15から読み出し、変換テーブル、および、顔検出部11により検出されたドライバの顔の位置に基づいて、イニシャル方向を検出する。本発明は、ドライバの顔の向きを検出する顔向き検出装置に適用できる。
(もっと読む)
通信システム及び通信方法
【課題】車両形状の違いによる車載機(通信端末)設置位置の違いから生じる通信エラーを低減することが可能な通信システムを提供すること。
【解決手段】通信システムは、走行車両の形状を検出する車両形状検出手段と、前記車両形状検出手段による形状検出結果に基づき通信開始タイミングを制御する通信制御手段と、前記通信制御手段による通信開始タイミングに基づき前記走行車両に搭載された通信端末と通信する通信手段とを備えている。
(もっと読む)
画像データにおいて重要対象物を識別するための仮想スポットライト
車両を運転しているときに運転者を支援するために、支援システムがますます用いられている。この目的のために、カメラを用いて、車両の周辺エリアから画像データを記録し、画像データ(1)の少なくともいくつかが、対象物識別と画像処理に続いてディスプレイに表示される。画像データがカメラによって記録された後で、それらは、対象物(2、3)を識別するために、対象物識別を用いて処理される。このような方法で識別された対象物(2、3)の少なくともいくつかが、画像データ(1)をディスプレイに表示するときに強調表示される。この場合に、識別された対象物(2、3)は、表示される画像データ(1)が2つのタイプの領域に分割されるようにして、強調表示される。この場合に、第1のタイプの領域には、識別されて強調表示されることになる対象物(2、3)と、それに対応してこれらの対象物にそれぞれ直接隣接する周囲領域(2a、3a)と、が含まれる。次に、第2のタイプの領域には、第1のタイプの領域に割り当てられなかった画像データ(1)が含まれる。次に、画像データ(1)における対象物は、両方のタイプの領域における画像データが、異なるやり方で操作されて、強調表示される。 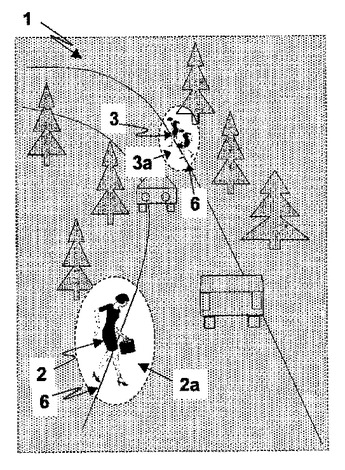 (もっと読む)
(もっと読む)
メーカ判定プログラムおよびメーカ判定装置
【課題】低解像度のカメラで撮影された画像データに基づいて画像中の車両のメーカを特定することができるメーカ判定プログラムおよびメーカ判定装置を提供すること。
【解決手段】メーカ判定装置100は、画像データにおける車両のエンブレム部分を認識するエンブレム認識部111と、エンブレム認識部111によって認識されたエンブレム部分の輪郭形状を抽出するエンブレム形状抽出部112と、エンブレム形状抽出部112によって抽出された輪郭形状が所定の特性を有するかを評価する形状特性評価部113と、形状特性評価部113の評価結果に基づいて、輪郭形状が最も類似するエンブレムをもつメーカを判定するメーカ判定部114とを備える。
(もっと読む)
1,961 - 1,980 / 2,648
[ Back to top ]