
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
2,041 - 2,060 / 2,648
画像速度算出装置及び画像速度算出方法
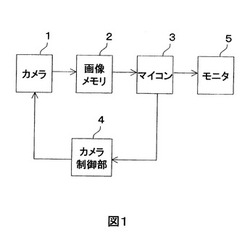
【課題】画像上で画像速度算出対象が高速で移動する場合でも、画像速度の算出を可能にする。
【解決手段】マイコン3により、カメラ1により撮像された画像上にカメラ1の露光中に発生する画像の流れを判定し、判定された画像の流れに基づいてカメラ制御部4によりカメラ1の露光時間を変更し、変更されたカメラ1の露光時間に基づいて、画像速度を算出する。
(もっと読む)
画像処理装置及び画像処理方法

【課題】夜間走行する車両の車灯と路面反射とを判別して、精度良く車灯の存在を判定することができる画像処理装置及び画像処理方法を提供する。
【解決手段】画像処理部24は、ビデオカメラ1で撮像して得られた撮像画像を2値化し、2値化画像において、ラベルリング処理により隣接する領域を連結して車灯候補領域を抽出する。画像処理部24は、抽出した車灯候補領域の円形度を算出し、算出した円形度が閾値以上であるか否かを判定し、円形度が閾値以上である場合、その車灯候補領域を車灯領域として特定する。画像処理部24は、円形度が閾値より小さい場合、その車灯候補領域を路面反射であるとして撮像画像から除去する。
(もっと読む)
車両の周辺監視装置
【課題】複数の撮像手段を介して取得される画像から車両周辺の対象物を検出する際に、検出対象物と背景対象物とが基準画像上で重なる可能性を低減して、対象物を精度良く検出することができる車両の周辺監視装置を提供する。
【解決手段】車両10に搭載された撮像手段2R,2Lを介して取得した画像から、車両10の周辺に存在する対象物を検出する。撮像手段2R,2Lを介して取得された画像のうちの所定の基準画像に対して、対象物を抽出する処理を実行する対象物抽出手段1と、車両10の走行環境を検出する走行環境検出手段1と、検出された走行環境に応じて対象物抽出手段1の処理で使用する基準画像を新たに選択する基準画像選択手段1とを備える。
(もっと読む)
画像処理装置
【課題】 本発明は、撮像対象物の3次元情報を把握可能な画像処理装置を提供する。
【解決手段】 視野領域が隣接するカメラ間で視野の一部領域が重なり合う複数のカメラ11〜14の画像中の重なり領域についてステレオ視処理部24により、ステレオ視処理することで、被写体の空間位置情報を求め、連続性判定部25において、視野が重なりあわない領域の被写体と重なり合う領域内の空間位置情報が既知の被写体との連続性を判定することで、視野が重なり合わない領域内の被写体についての空間位置情報を補間する。
(もっと読む)
車線検出装置および車線逸脱警報装置
【課題】自車両が車線のある方向へ逸脱している場合と車線のない方向へ逸脱している場合とで異なる警報を行うことができるようにする。
【解決手段】車線検出装置2は、カメラ4で撮像した路面画像から生成した俯瞰画像に対して複数の車線検出領域を設定し、各車線検出領域において算出した輝度プロファイルに基づいて、自車両の走行車線、およびこの走行車線の両側外側における車線の有無を検知する。車線逸脱警報装置1は、車線検出装置2で得た車線検知情報と、横移動速度検出部12で検出された横移動速度情報とに基づいて、自車両が走行車線から車線のない隣側または車線のある隣側のいずれかの側に逸脱傾向にあるか否かを判定し、自車両が車線のある方向へ逸脱している場合と車線のない方向へ逸脱している場合とで異なる警報を行う。
(もっと読む)
画像認識装置、画像認識方法および画像認識プログラム
【課題】単眼カメラによって歩行者と路面との接地部分が明瞭に撮像されていなくても、画像内の歩行者の接地位置を推定することを課題とする。
【解決手段】この車両制御装置は、検出された候補領域に所持する複数のパターンのあてはめを行い、所定の相関の得られた相関パターンの抽出を行う(図1の(2)参照)。かかる相関パターン抽出の後、この車両制御装置は足元位置の推定を行う(図1の(3)参照)。具体的には、この車両制御装置は、抽出した歩行者の一部のパターンから全身の大きさを把握し、候補領域内の歩行者の画像上の足元位置をその全身の大きさから推定する。
(もっと読む)
駅ホーム監視システム
【課題】人と人の重なりなどホーム上における事情を考慮せずに高精度の監視を行う。
【解決手段】撮像を行って画像情報を得る複数の赤外画像式撮像装置である撮像装置1−1〜1−nと、前記撮像装置1−1〜1−nを駅ホーム監視を行う撮像位置と監視を行わない退避位置との間において移動させるカメラ移動装置3−1〜3−nと、前記撮像装置1−1〜1−nから得られる画像情報を処理して列車の軌道に人の有無を検出する画像処理装置2とを具備する。カメラ移動装置3−1〜3−nは、列車が通過する軌道上の位置から、列車の通過を妨げない位置までの間において移動させる。
(もっと読む)
交通管理システム
【課題】本発明の目的は、道路交通の円滑性を向上させることが可能な交通管理システムを提供することである。
【解決手段】本発明による交通管理システムは、複数の車両番号検出装置(101〜104、100、200、300)と、車両情報データベースを格納した記憶部を有する統合管理装置(400)とを具備している。ここで、前記複数の車両番号検出装置の各々は、道路網の所定の地点に配置され、前記地点を通行する対象車両から前記対象車両の車両番号情報を検出し、前記車両番号情報と、前記地点を示す地点情報と、前記車両番号を検出した時刻を示す時刻情報とを含む車両情報を前記統合管理装置に対して送信する。前記記憶部は、前記車両情報を前記車両情報データベースに追加して記憶する。
(もっと読む)
画像上移動物体追跡方法及び装置
【課題】移動物体の計測誤差を低減できる計測点及びこのような計測点を求めるための代表点を求める。
【解決手段】クラスタ後端が入口スリットの後端を完全に通過したと判定すると、初期値決定部26は、IDオブジェクトマップに基づいて、クラスタの幾何学的重心位置を移動物体の代表点RP(t0)として求め、また、動きベクトル平均値算出部27から代表動きベクトルRMV(t0)を取得し、代表点RP(t0)を始点としRMV(t0)と逆方向でクラスタ内の最も外側のエッジ位置を終点とするオフセットベクトルOFV(t0)を求める。代表点追跡部28は、RP(t0)に、順次求められる代表動きベクトルRMV(t)を累積加算して、代表点の軌跡RP(t)を求める。計測点追跡部2Aは、RP(t)を始点とするオフセットベクトルOFV(t)=−|OFV(t0)|・μ(i,j)/μ(i0,j0)・RMV(t)/|RMV(t)|を求める。
(もっと読む)
物体識別装置
【課題】センサで検出した物体が人(または動物)であるかを正確に識別し、その位置や距離を求めることができる物体識別装置を提供する。
【解決手段】レーザレーダ制御部8はレーザレーダ2で所定強度以上の反射が有った場合に、物体が存在するとして判定するとともに、その物体の方向、および距離を求める。画像処理部4は、カメラ3で撮影した画像から人の顔を検出する。座標変換部5は、画像認識により検出した顔の座標をレーザレーダのスキャン範囲内の位置に置き換える。空間対応処理部7は、この顔の位置に対応する物体を人として識別する。これによりレーザレーダで検出した物体が人であるかを正確に識別することができ、人の存在する方向や距離を求めることができる。
(もっと読む)
画像リサイジング機能付撮像装置及び画像表示システム
【課題】表示装置側への画像の伝送手段として現状のNTSC信号等を使用した場合でもイメージセンサの高解像度化のメリットを活かすことができるとともに、表示装置側で必要とする部分の画像を取得できるようにした「画像リサイジング機能付撮像装置及び画像表示システム」を提供すること。
【解決手段】撮像装置10は、イメージセンサ12と、取得要求の対象とされる画像の種類に応じて予めリサイジングの態様を規定したテーブルを格納した記憶手段17と、制御手段15とを備える。制御手段15は、外部からの画像要求信号RQに応答してテーブルを参照し、イメージセンサ12で取得された画像データを、画像要求信号RQにより指示される画像の種類に対応したリサイジングの態様により、所要の解像度に合わせた出力画像サイズに変換して出力する。
(もっと読む)
パワーウインドウ装置
【課題】ウインドウによる異物の挟み込みを、実際に異物を挟む前に検出することができるパワーウインドウ装置を提供する。
【解決手段】車両1に、挟み込み検出機能を備えた画像処理装置15を設け、車両1のドア2に、窓枠周辺を撮影可能な赤外線カメラ14を取り付ける。画像処理装置15は、赤外線カメラ14から画像データDpicを取得し、この画像データDpicを用いて挟み込みの有無を判定する。画像処理装置15は、ウインドウ3に挟み込まれる位置に異物が侵入したと判定すると、挟み込みが生じ得ると認識し、その旨をパワーウインドウECU6に通知する。この通知を受けたパワーウインドウECU6は、安全動作を実施してウインドウ3の昇降に規制を加え、ウインドウ3による挟み込みを未然に防ぐ。
(もっと読む)
車両の前方立体物認識装置
【課題】高精度な前方認識手段を用いることなく、一般に普及している前方認識装置を用いて前方立体物を高精度に認識できるようにする。
【解決手段】立体物検出処理部9は、ミリ波レーダ装置3、ステレオカメラ装置2、レーザレーダ装置4の各前方認識手段で検出した前方立体物Mi,Ii,Liに基づき、車体幅方向の位置座標、車体前後方向の距離座標、車体前後方向の相対速度からなる特徴量を求め、各前方立体物Mi,Ii,Liの全ての組み合わせから各特徴量の同一確率を各特徴量の誤差に関するガウス分布に基づき求める。そして、求めた同一確率に基づき各前方立体物に同一立体物があるか否かを判定し、同一と判定された各前方立体物どうしは、その各特徴量に基づいてフュージョン立体物を生成し、非同一と判定された前方立体物は、当該前方立体物を特定する特徴量のみでフュージョン立体物を生成する。
(もっと読む)
車載カメラシステム
【課題】車両の運転者が、その停車中に、信号機の発色に赤信号色から青信号色への変化があった場合にも、その発色変化の見落としを確実に防止することができ、車両運転時の操作不足を効率よく補助支援することができる車載カメラシステムを提供する。
【解決手段】前方の信号機104に赤信号色から青信号色への発色変化があった場合には、この発色変化があったことを自動的に判断して、車両101の運転者に対して、前方における信号機104の赤信号色から青信号色への発色変化を、早期にかつ正確に警告報知する。
(もっと読む)
車番認識システム
【課題】陸運支局コード等追加に伴い、運用現場において、車番認識部のソフトウェアの入れ替えを必要としないで、コストダウンを図るとともに車番認識システムを提供する。
【解決手段】駐車場にカメラと管理計算機とを備え、カメラは駐車場の車両を撮像し、管理計算機は前記カメラにより撮像したデータを車番認識センターに転送する。複数の各駐車場の管理計算機から転送される撮像データは通信処理部により受信され、通信処理部からの撮像データについて車両の車番を認識処理し、その結果を通信処理部より前記撮像データを転送した管理計算機に送付する。駐車場では車両を撮像し、車番は車番認識センターにより行う。車番認識手段を各駐車場に備える必要はなくなる。車番認識センターは車番認識手段を集中して備えるため高性能の車番認識手段を持つことができ、ソフトウェアのメンテナンスも集中し、容易になる。
(もっと読む)
車両用撮像装置
【課題】ノイズ除去された遠赤外線画像を安定的に出力する。
【解決手段】特徴点抽出部5が、撮像部2によって撮像された熱画像を構成する画素のうち、周辺画素との輝度差が所定値以上の画素を特徴点Aとして抽出し、ヒストグラム算出部6は、抽出された特徴点Aの輝度値の分布状態を示す輝度ヒストグラムを算出し、ノイズ判定部7が、算出された輝度ヒストグラムに基づいて熱画像中におけるノイズの出現状態を判定し、ノイズ低減部8が、ノイズ判定部7の判定結果に従って熱画像中のノイズを除去する。これにより、ノイズ除去を長時間行えないようなことがなくなるので、ノイズ除去された遠赤外線画像を安定的に出力することができる。
(もっと読む)
ウインドウ画像領域検出装置及びパワーウインドウ装置
【課題】カメラ等の撮影機器から得た撮影画像を用い、自動でウインドウ画像領域部分を抽出することができるウインドウ画像領域検出装置及びパワーウインドウ装置を提供する。
【解決手段】車両1に、挟み込み検出機能を備えた画像処理装置15を設け、車両1のドア2に、窓枠周辺を撮影可能な赤外線カメラ14を取り付ける。画像処理装置15は、赤外線カメラ14から取得した画像データDpicからウインドウ3の動き領域を抽出し、これを順次積算することでウインドウ画像領域を抽出する。ウインドウ画像領域を抽出した画像処理装置15は、この領域から撮影画像Picにおける検知エリアを抽出する。画像処理装置15は、撮影画像に映った異物が検知エリアに侵入したと判定すると、挟み込みが生じ得ると認識し、その旨をパワーウインドウECU6に通知し、パワーウインドウECU6に安全動作を実行させる。
(もっと読む)
幾何情報を校正してパノラマ映像を提供する方法および装置
【課題】幾何情報を校正してパノラマ映像を提供する方法および装置に関する。
【解決手段】平面方向に傾斜した角度(a)と深さ方向に湾曲した角度(b)に基づいて定義された行列H(a、b)とカメラパラメータ内部行列Kによって定められる行列HFをソースイメージベクトル(x、y)に適用してティルティングベクトルを生成する。また、前記カメラパラメータ行列Kを用いてソースイメージ2Dベクトル(x、y)を地平面の原点から距離が1である網膜平面上の3Dベクトル(X、Y、W)に変換する。最後に、網膜平面のイメージの幅とFOVの角度を用いてワーピングされたイメージ幅(WIW)を予測し、一定角度に該当する網膜平面イメージの幅方向のピクセルの適合した個数を角度に合わせて円柱に投映し、前記変換されたベクトル(X、Y、W)と前記ワーピングされたイメージ幅(WIW)に基づいて定義された値によってワーピングベクトルを生成する。
(もっと読む)
車両用運転支援装置及び俯瞰映像の表示方法
【課題】切り返し操作が必要な駐車シーンなどにおいても最適な表示形態で俯瞰映像を表示して、運転者の運転操作を適切に支援できるようにする。
【解決手段】画像処理装置10の制御部17が、自車が駐車態勢に入ったと推定できる何らかのトリガを検出したときに、俯瞰映像作成部15の処理を第1俯瞰映像作成手段による処理から第2俯瞰映像作成手段による処理へと切り替えて、表示装置5に表示される俯瞰映像を、自車CGが画面中央に固定されて車両周囲映像が自車の移動に伴い変化する表示形態の第1俯瞰映像から、車両周囲映像が画面上で固定されて自車CGの位置が自車の移動に伴い変化する表示形態の第2俯瞰映像へと切り替える。
(もっと読む)
イメージマッチング速度とブレンディング方法を改善したパノラマ映像提供方法および装置
【課題】 イメージマッチング速度とブレンディング方法を改善したパノラマ映像提供方法および装置に関する。
【解決手段】 前記パノラマ映像を提供する方法においては、イメージステッチング時に、二つのソースイメージそれぞれを様々な比率でスケーリングした複数レベルのイメージを準備し、各レベルで二つのイメージの一定領域に対するSSDを計算してマッチングさせる。また、カラーブレンディング時に、二つのソースイメージの重なった部分のうち、一定範囲にて10%程度のみのブレンディング領域にリニアするように加重値を適用する。
(もっと読む)
2,041 - 2,060 / 2,648
[ Back to top ]