
Fターム[5B057BA11]の内容
Fターム[5B057BA11]の下位に属するFターム
センサの構造 (343)
光学系の構造 (344)
センサ、光学系の位置調整 (353)
読取ステージ (293)
Fターム[5B057BA11]に分類される特許
261 - 280 / 492
画像処理装置及び画像処理方法
絞りの開口部を介して被写体から入射される光を撮像素子部で結像した結果を、画像として所得する画像取得手段と、前記画像取得手段が前記画像を取得する際に、前記開口部の形状の時間的な変化を規定する関数に基づいて、前記開口部の形状を制御する制御手段と、前記関数に基づいて、前記画像におけるボケ状態を検出する検出手段とを備えることを特徴とする画像処理装置。  (もっと読む)
(もっと読む)
カメラ、並びに画像の輝度調整方法及びプログラム

【課題】個々の画像データに対応して画質を適切に自動調整する技術を提供する。
【解決手段】画像データと、前記画像データ生成時における絞り情報と動作モード情報とレンズ焦点距離情報とを少なくとも含むと共に前記画像データに関連付けられた画像生成情報とを用い、前記画像生成情報に含まれる前記絞り情報と前記動作モード情報と前記レンズ焦点距離情報とに基づいた前記画像データのシャープネスの調整を行う。
(もっと読む)
画像信号処理方法

【課題】仮想画素の補間処理により生じる画質劣化を回避することのできる画像信号処理方法を提供。
【解決手段】この信号処理は、静止画補間信号処理(SUB1)で各RGBの透過光を実在画素から各色の画素データを求め、RB実在画素の一方を対象の画素とし、対象の画素に対する相関判別領域の頂点を、少なくとも対象の画素と同色の画素で表わす領域にまで広げて相関判別して相関精度を向上させ、相関方向にある対象の画素と異色の周囲の他方の複数の画素データからGの補色画素データで輝度データを生成し、さらに仮想画素での輝度データの補間生成、実在および仮想画素それぞれの色属性を基に実在および仮想画素すべてで得られた色属性と異なるRBGすべてを補間生成し、静止画用広帯域化処理(SUB2)で各色の画素データを広帯域化する。
(もっと読む)
画像処理システム及び画像処理方法、並びに、プログラム
【課題】監視対象領域の画像にマスク設定を行っても動体であるオブジェクトを正確に検知できるようにする。
【解決手段】メタデータ生成部13において、オブジェクト検知部131は、フレーム単位の画像データDvから動体であるオブジェクトを検知する処理を行う。オブジェクト発生位置検知部132は、オブジェクト検知部131によって検知されたオブジェクトの発生位置を検知する。有効オブジェクト判定部133は、現在マスク領域内にあるオブジェクトの発生位置がマスク領域外である場合にはこのオブジェクトを有効オブジェクトであると判定する。
(もっと読む)
画像高解像度化方法および動画撮像装置
【課題】複数枚の入力画像フレームを合成することにより、画像フレームを構成する画素数を増加して出力画像フレームを得ることを特徴とする出力画像フレーム生成方式に対して、好適な入力画像フレームを準備することで、効率の良い高解像度化処理を実現可能とする。
【解決手段】動画記録装置10がある方向へ動いた際には、その動きに応じて、好適な画像フレームを記録可能となる位置へCCD200を移動させて画像フレームをサンプリングし、動画を記録する際に該CCD200を移動させた分だけ画像フレーム位置を補正することで、上述の高解像度化処理に好適な入力画像フレームを得ることが可能となる。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】画像から対象物を検出する画像処理において検出精度を向上させる。
【解決手段】画像から対象物を検出する画像処理装置は、前記対象物に含まれる第1の領域を写した複数枚の画像を教師画像として学習してその学習結果を用いて前記対象物の判別を行う第1の判別器(21)と、前記対象物に含まれる前記第1の領域と異なる第2の領域を写した複数枚の画像を教師画像として学習してその学習結果を用いて前記対象物の判別を行う第2の判別器(22)を有する対象物検出部(2)を備える。前記対象物検出部(2)は、前記対象物のうち特定の対象物のコントラストに基づき前記第1の判別器(21)及び前記第2の判別器(22)のうち前記前記特定の対象物の検出に適した判別器を選択し、選択した判別器を用いて前記画像から前記対象物を検出する。
(もっと読む)
画像形成装置
【課題】ドット扁平による画像の再現性の低下を抑制可能な画像形成装置を提供する。
【解決手段】線幅検出部18は、パターン検出部16からの入力画像データに基づいて、線幅検出パターンの主走査方向の線幅および副走査方向の線幅をそれぞれ検出する。線幅調整部20は、主走査方向の線幅および副走査方向の線幅に基づいて、主走査方向と副走査方向との間の扁平率(扁平の度合い)を算出し、いずれかの方向にドット扁平が生じているか否かを判断する。誤差拡散部12は、誤差拡散処理に用いる分配パターンを変更し、ドット扁平が補正されるように、入力画像データを補正する。
(もっと読む)
動き補償を用いた画像の奥行き抽出のためのシステムおよび方法
画像の空間時間的奥行き抽出のためのシステムおよび方法が提供される。システムおよび方法は、シーンからの画像のシーケンスを取得し(502)、前記シーケンスは画像の複数の相続くフレームを含み、少なくとも一つのフレームについて、第一の画像中の少なくとも一つの点の第二の画像中の少なくとも一つの対応する点との視差を推定し(504、506)、前記第一の画像中の前記少なくとも一つの点の動きを推定し(605)、前記シーケンスの前方方向の少なくとも一つの前のフレームの推定された視差に基づいて、前記少なくとも一つの次の後続フレームの視差を推定し(508)、ここで、前記推定視差は推定された動きを用いて補償され、前記シーケンスの後方方向の少なくとも一つの前のフレームの推定された視差に基づいて、前記複数の相続くフレームのそれぞれの推定された視差を最小化する(512)ことを含む。 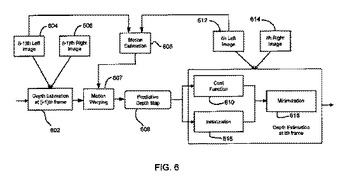 (もっと読む)
(もっと読む)
画像処理装置及び画像処理方法
【課題】撮像画像に検出対象と一体となって写りこむ反射成分を効果的に除去し、撮像画像から対象を正しく検出することを可能とする画像処理装置及び画像処理方法を提供する。
【解決手段】画像処理装置の制御部は、撮像装置から取得される画像データに基づき背景差分等により差分を求め(S2)、検出対象が写っている検出対象領域の候補として抽出する。抽出された候補の画像データにおける位置に基づき、検出対象までの距離を算出する(S3)。制御部は、算出した距離に基づき、抽出された候補の画像データにおける大きさが、検出対象領域が占めるべき領域の大きさとして妥当であるか否かを判定することにより反射成分を含むか否かを判定する(S4)。制御部は、反射成分を含む場合には境界を特定して除去する(S5)。
(もっと読む)
物体のテキストベースの画像を自動的に拡大する方法および装置
表面上に支持された物体3に設けられたテキストベースの原画像5、5Aを撮像する方法および装置。物体3の上方に、テキストベースの画像5、5Aを撮像するためのカメラ7が位置付けられる。カメラ7は、レンズ9を通して物体3の少なくとも一部の合焦画像を生成し、カメラ7によって撮像された画像をディスプレイデバイス15での表示用に指定されたサイズに拡大するために、この画像をプロセッサ11に送る。プロセッサ11において、ディスプレイ15への表示用の、第1のフォントサイズに依存しない、第2の既定の表示用フォントサイズ19、19Aによって制御される倍率への拡大が行われる。 (もっと読む)
空間予測近似と半径方向の畳み込み積分
本発明は、三次元座標系に対する対象ポイントのロケーションを近似する為の方法を提供し、カメラの視界内に対象ポイントが入るよう対象ポイントへカメラの方向を合せるステップと、三次元座標系に対するロケーションと、カメラの向き及びカメラのチルトを含むカメラポジションとを含むカメラデータを検索するステップと、関連地形図データベースへ問合せ、カメラの向きに沿った地形図上に位置決めされている1以上の座標を識別し、第1のデータセットを形成するステップと、カメラの向き及びカメラのチルトに基づき、カメラと対象ポイントとの間の半径方向平面上に位置決めされている1以上の座標を計算し、第2のデータセットを形成するステップと、第1のデータセットと第2のデータセットとを比較し一致する座標対を識別するステップとを含み、一致する座標が対象ポイントの三次元座標位置を表す。本方法を実行する為のシステム及びソフトウェアも提供する。  (もっと読む)
(もっと読む)
画像処理システム、画像処理方法およびプログラム
【課題】演算装置による他の処理の実行を妨げることなく、演算装置による記録データの作成を行う。
【解決手段】デジタルスチルカメラに、シナリオデータ93に基づいて素材データ90にデータ処理を施す画像生成部102および音声生成部103と、画像生成部102および音声生成部103によって生成された編集データ(画像ストリーム情報および音声ストリーム情報)を符号化して記録データ94を作成するA/Vコーデック部104と、デジタルカメラのCPU(演算装置)の空き時間を検出するスケジュール部105とを設ける。そして、スケジュール部105が空き時間を検出した場合にのみ、A/Vコーデック部104による符号化(記録データ94の作成処理)が開始されるように構成する。
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】画像において所望とする領域を効率よく設定できるようにする。
【解決手段】対象領域A1の開始位置の設定指示により、対象領域A1の開始位置B0を設定し、開始位置設定後の目標被写体の動きに応じて、開始位置B0を基準として領域設定枠W0の大きさをスルー画像上において変化させる。対象領域の終了位置E0の設定指示により、開始位置B0および終了位置E0に基づく形状およびサイズを有する対象領域A1を設定する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、および画像表示装置
【課題】 複数の画像を順次再生するにあたって、単調な画像の遷移とはならず、楽しむことのできる画像処理装置、画像処理方法、画像処理プログラム、および画像表示装置を提供する。
【解決手段】 顔画像を含むカメラで撮影された複数の画像を順次表示するために、顔画像に対して所定の画像処理を行う画像処理装置であって、画像を分類する画像分類部5と、順次表示における顔画像を含む画像に後続して表示される画像について、画像分類部5による分類結果に応じて、顔画像の表情を変化させるための画像処理を行う表情切換画像処理部4と、この画像処理された画像を表示する表示部8を具備する。
(もっと読む)
指静脈認証装置及び指静脈認証方法
【課題】小型かつ認証精度の高い指静脈認証装置を提供すること。
【解決手段】本発明の第1の形態に係る指静脈認証装置は、光源104と撮像素子106とを備え、光源104からの光を照射して、撮像素子106により指内部の静脈パターンを撮像する指静脈認証装置であって、認証対象指に光源104からの光を照射せずに撮影されたノイズ画像に基づいて、当該指に光源104からの光を照射して撮影された指静脈画像のノイズを除去する画像ノイズ除去部304を備えるものである。
(もっと読む)
画像処理装置およびその制御方法およびプログラム
【課題】 簡単な操作によって、写真画像の部分領域についてその評価を保持しておけるようにすることを目的とする。
【解決手段】 画像中の部分領域を指定し、その部分領域毎に、例えば撮影失敗か成功かを示すレイティング情報を設定し、画像に関連づけて記録する。例えば、デジタルカメラでは、画像を記録メディアから読み出して再生し、ズーム機能を用いて画像の一部分を拡大して表示する。この拡大表示された部分領域をレイティング情報を付与する対象として指定する。画像は部分領域の位置やレイティング情報を関連付けて記録される。
(もっと読む)
画像処理装置
【課題】ジャギーが少なく滑らかで、かつ、偽色の少ない画素補間を行うことができる画像処理装置を提供する。
【解決手段】輪郭の有無・方向性評価部12〜15は、入力されたR画素、B画素、G_a画素、G_b画素をそれぞれ中心とする複数の画素範囲を評価領域とし、その評価領域のR画素、B画素、G画素の画素信号についての輪郭の有無の評価と、存在する輪郭の方向性の評価を行う。内挿・高域加算処理部16〜19は、G信号の方向性とB/R信号の方向性とが予め設定した角度範囲以内にあると判定したときは、判定された方向性が示す方向に配置された中心画素におけるその中心画素とは異なる二つの色要素の複数の画素の値に基づいて、二つの色要素の補間値を算出し、この算出した二つの色要素の補間値を中心画素における二つの色要素の画素値として内挿する。
(もっと読む)
画像形成装置、画像形成方法及びコンピュータプログラム
【課題】特定の領域のみを拡大する場合であっても、全ての原稿情報をコピーすることができる画像形成装置、画像形成方法及びコンピュータプログラムの提供。
【解決手段】原稿画像の読み取りを行い(S11)、変倍する領域の指定(S12)、指定された領域内の画像に対する変倍率の設定(S13)、用紙サイズの設定(S14)を受付ける。そして、指定画像領域に隣接する指定外画像領域を抽出し(S15)、各指定外画像領域内の画像に対する変倍率を、変倍後の各領域の画像が連続するように、しかも設定した用紙サイズに収まるように変倍率を算出する(S16)。設定された変倍率及び算出した変倍率で各領域の画像を変倍し(S17,S18)、変倍された画像同士を合成して(S19)、画像形成を行う(S20)。
(もっと読む)
分光反射率近似装置、分光反射率推定装置及びその方法並びにそのプログラム
【課題】分光反射率を近似する。
【解決手段】複数の分光反射率データの母集団データと、それらの符号を反転したデータから寄与率の高い少数の基底ベクトルを抽出して基底ベクトル群を求める手段と、分光反射率の近似対象となる物体における白色の分光反射率ベクトルを単位長に正規化して白色基底ベクトルを求める手段と、基底ベクトル群と、白色基底ベクトルとの直交成分から補空間ベクトル群を導出する手段と、補空間ベクトル群と、それらの符号を反転したデータとの集合から補空間基底ベクトル群を導出する手段と、補空間基底ベクトル群の中で最も寄与率の低い基底ベクトルを白色基底ベクトルと置き換えて無彩色補正基底ベクトル群を求める手段と、近似対象となる分光反射率を無彩色補正基底ベクトル群により展開したときの展開係数ベクトルを算出する手段と、無彩色補正基底ベクトル群と展開係数ベクトルとの結合により分光反射率を近似する手段とを備えた。
(もっと読む)
画像処理装置
【課題】
小さな画像を読み取る際に操作性の良い画像処理装置を提供する。
【解決手段】
画像処理装置に備えられた操作パネル13は、入力部13aと、表示部13bと、操作制御部13fとを備える。操作制御部13fは、表示部13bに備えられた画面13dの画素TFTアレイを制御する表示制御部102と、画面13dのフォトダイオードセンサアレイを制御する画像入力制御部103と、キー入力を読み取って、スキャナ制御部106へ送信する入力制御部105と、これら制御部の制御を司るスキャナ制御部106とを備える。
(もっと読む)
261 - 280 / 492
[ Back to top ]