
Fターム[5B057BA12]の内容
Fターム[5B057BA12]の下位に属するFターム
複数ラインセンサを用いるもの (204)
Fターム[5B057BA12]に分類される特許
41 - 60 / 139
マーカ生成装置、マーカ生成検出システム、マーカ生成検出装置、マーカ、マーカ生成方法及びプログラム

【課題】 視認性が悪い環境などにおいても使用可能な信号発信物体を用いてマーカを生成する。
【解決手段】 一又は二以上の信号発信物体の位置及びその発信信号の属性値を計測するセンサ情報入力手段10と、信号発信物体の位置にもとづいて特徴点を抽出する特徴抽出手段20と、この特徴点を不変量特徴空間に表し、その位置を記憶する不変特徴変換手段30と、不変量特徴空間における特徴点の数が所定数以下の位置を選択し、この選択した位置から前記各信号発信物体の発信信号の属性値とは異なる他の属性値の信号を発信させるマーカパターンを生成するマーカパターン生成手段50とを備えた構成としてある。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム

【課題】2以上の画像の間において対応点を迅速且つ精度良く探索することが可能な技術を提供する。
【解決手段】同一の被写体を各々とらえた第1画像と第2画像とを含む複数の画像を取得し、第1画像に対して第1および第2探索基準点を含む複数の探索基準点を設定する。次に、第2画像について第1探索基準点に対応する第1対応点と第2探索基準点に対応する第2対応点とを探索することで、第1画像と第2画像との間における第1探索基準点に係る第1視差および該第1視差に係る第1信頼度と第2探索基準点に係る第2視差および該第2視差に係る第2信頼度とを導出する。そして、第1視差、第1信頼度、第2視差、および第2信頼度に基づき、第1画像において第1探索基準点と第2探索基準点とによって挟まれる演算基準点について、第1画像と第2画像との間における推定視差を決定する。
(もっと読む)
画像読取装置
【課題】 ドロップアウトすべき印刷部の照明光の各波長に依存した帳票からの読み取り画像データの特徴を抽出し、ドロップアウトする画素を白判定されるデータと置換するリアルタイム動作の画像読取装置を提供する。
【解決手段】 色画像位置同期回路部と、色画像位置同期回路部の出力から分岐させた一方の信号を受光部の同一画素位置における発光色毎のデータが指定した範囲内にある場合にドロップアウトデータとして画素位置情報を出力する色判定部と、色画像位置同期回路部の出力から分岐させた他方の信号を発光色毎に決められた定数データを乗算する画像モノクロ化ゲイン部310と、受光部の同一画素位置データを加算し単色データとして出力する画像モノクロ化回路部と、単色データを色判定部の画素位置情報に対応する画素をドロップアウトレベルにデータ置換するデータ置換部とを備えるようにした。
(もっと読む)
画像データのサイズを低下させるための方法および装置
前記入力画像(IMG1)に対する出力画素(P2)の位置(OP)を決定することと、フィルタアレイ(FA1)の要素(E)の値を決定すること、ただし前記要素(E)の非ゼロ値が、基点(BP)において最大値を有する放物基準面(REFS)を近似するように決定することと、前記要素(E)の非ゼロ値と、対応する場所に位置する前記入力画像(IMG1)の入力画素(P1)の値との間で積和演算を実行することにより、前記出力画素(P2)の値を決定すること、によって、入力画像(IMG1)は、低解像度出力画像(IMG2)に変換されてもよい。ただし前記フィルタアレイ(FA1)は、基点(BP)の位置が前記出力画素(P2)の位置に対応するように前記入力画像(IMG1)上に重ね合わせられる。 (もっと読む)
高速視覚センサ装置
【課題】 簡単な回路構成で、複数の画像間に対しても効率的に高速演算処理が可能な多画素数の高速視覚センサ装置を提供する。
【解決手段】 受光素子アレイ11の各列の受光素子120に対して1個のA/D変換器210を対応させたA/D変換器アレイ13と、受光素子120と1対1に対応する演算素子400と転送用シフトレジスタ410からなる並列処理機構14とを備えている。演算素子400は並列処理により近傍画素間の画像処理演算を高速で行うことができるとともに、転送用シフトレジスタ410における転送処理と独立して演算処理が行えるので、演算処理、転送処理を効率良く行うことができる。
(もっと読む)
植生生育状況解析方法、プログラムおよび植生生育状況解析装置
【課題】人工衛星等の飛翔体から得られるレーダ画像を利用して、多時期の植生の生育状況を正確に解析できるようにする。
【解決手段】飛翔体に搭載されたレーダ装置で複数の時期に撮影された、同一対象エリアの地表面のレーダ画像を取得し、取得された複数のレーダ画像を地図データベースに保存する。次に、所定時期に撮影されたレーダ画像を基準画像として、他の時期に撮影されたレーダ画像の位置合わせを行った後、前記レーダ画像の特定領域の後方散乱係数を抽出する。さらに、前記地図データベースに保存された複数のレーダ画像のうち、前記基準画像の特定領域の後方散乱係数を基に、他のレーダ画像の後方散乱係数を較正する。そして、レーダ画像の後方散乱係数と植生の生育値の相関関係に基づいて、前記較正されたレーダ画像の後方散乱係数から当該レーダ画像に写っている植生の生育値を算出する。
(もっと読む)
コンピュータ断層撮影装置及び方法
【課題】本発明の目的は、コンピュータ断層撮影装置及び方法において、逆投影に要する補間処理を効果的に簡素化することにある。
【解決手段】コンピュータ断層撮影方法は、X線源50から逆投影画素を通る線形経路51に対応するX線検出器52上のチャンネル位置Chを決定する段階と、X線源50から逆投影画素Chまでの距離から補間カーネル幅ΔChを決定する段階とを有する。
(もっと読む)
表面欠陥評価装置
【課題】対応する測定点と基準点との間の距離を逐次収束させる逐次収束処理に基づいて測定点と基準点とを位置合わせしたのち、測定点と基準点との空間位置座標から適正に表面欠陥を判定する技術を提供する。
【解決手段】測定対象物の測定点と測定対象物の基準表面形状に対応する基準点との間の距離を逐次収束させる逐次収束処理に基づいて前記測定点と前記基準点とを位置合わせした後の測定点データと基準点データとに基づいて測定対象物の表面欠陥を評価する。表面欠陥評価において、基準点と適正に対応せず互いに隣接する複数の測定点からなる誤対応測定点群の分布密度に基づいて当該誤対応測定点群によって規定される表面領域を表面欠陥と判定する。
(もっと読む)
車載用画像処理装置及びその画像処理方法
【課題】小さい回路規模で、補正性能をあまり劣化させることなく、運転者が十分に見易い仮想視点画像を生成する。具体的には、魚眼画像を路面に引かれた駐車枠が直線的かつ平行に近い状態に見える画像に変換する。
【解決手段】画像処理装置120は、車両100に取り付けられた撮像装置110で撮像された路面上の車両の周囲の画像を、該撮像装置の視点と異なる視点(仮想視点)からみた仮想視点画像に変換する仮想視点変換手段を有する。この仮想視点変換手段は、撮像装置で撮像された魚眼画像について、そのX座標のみの座標変換を行って、無消失点状の仮想視点画像を生成する。
(もっと読む)
入出力装置
【課題】薄型でありながら、高解像度の2次元画像を表示すると共に3次元空間における物体の位置を検知することが可能な入出力装置を提供する。
【解決手段】入出力装置1の入出力パネル10は、ディスプレイ部11の表示面側に、平坦部12aとマイクロレンズ部12bとを有するレンズ基板12を設置したものである。ディスプレイ部11では、表示領域11Aと撮像領域11Bが混在して配置され、このうち表示領域11Aはレンズ基板12の平坦部12a、撮像領域11Bはレンズ基板12のマイクロレンズ部12bにそれぞれ対向配置されている。表示領域11Aで表示された画像は画像光として、レンズ基板12の平坦部12aを透過する一方、撮像領域11Bでは、光線の進行方向の情報を保持しつつ、指100の撮像データD1を取得する。この撮像データD1に基づいて、指100の位置(x,y,z)が検知され、位置データDoutとして出力される。
(もっと読む)
位置誤差補正装置及び位置誤差補正プログラム
【課題】衛星画像に関する光学マルチセンサデータのシステム補正処理から幾何モデルパラメータ調整までの一連の処理を再帰的に自動で行う装置を提供する。
【解決手段】画像処理部10は、光学マルチセンサデータ、人工衛星の軌道・姿勢データ、幾何モデルパラメータに基づき、複数帯域の衛星画像データを作成する。バンド間位置誤差算出部20は、所定の帯域の衛星画像データを基準画像データとし、基準画像データ以外の各帯域の衛星画像データを参照画像データとし、基準画像データと各参照画像データとの間の位置誤差をバンド間位置誤差として参照画像データごとに算出する。幾何モデルパラメータ算出部40は、各バンド間位置誤差に基づき、新たな幾何モデルパラメータを算出する。画像処理部10は、前記光学マルチセンサデータ、前記軌道・姿勢衛星データ、新たに算出された幾何モデルパラメータとから新たに複数帯域の衛星画像データを作成する。
(もっと読む)
画像処理装置および画像信号の補間処理方法、画像処理プログラム
【課題】画像のエッジ部や細部の高周波成分を復元できる、汎用性の高い画像処理装置を提供する。
【解決手段】補間処理部14を構成する、G成分補間部141、R成分補間部142、およびB成分補間部143は、それぞれ補間の対象となる注目画素に対し、複数の方向の信号変化量を求め、その1方向の画素を選択し、この選択された方向の画素を用いて注目画素の補間を行うことにより、信号変化率を使った補間処理を実現する。
(もっと読む)
画像処理装置および画像信号の補間処理方法
【課題】画像のエッジ部や細部の高周波成分を復元できる、汎用性の高い画像処理装置を提供する。
【解決手段】補間処理部14を構成する、G成分補間部141、R成分補間部142、およびB成分補間部143は、それぞれ補間の対象となる注目画素に対して、複数方向の信号変化量を求め、この複数方向の信号変化量から、変化量の少ない1方向を選択し、この選択した方向の画素を使って補間処理を行う。この信号変化量は、2つの色成分を使い、補間する色と同じ色同士の差分と、補間する色と違う色同士の差分と、同じ画素の2つの色成分の差分とを求め、これらの差分を絶対値で加算して求める。また、重み付け係数を使い、計算の重み付けをする。
(もっと読む)
全方位撮影補助装置、全方位画像処理装置および方法並びにプログラム
【課題】全方位画像における円形領域の中心座標を精度良く求める。
【解決手段】全方位撮影システム1を、全方位撮影補助装置2およびデジタルカメラ3から構成する。全方位撮影補助装置2は、全方位ミラー5、シート部材6および円筒部材7からなる。全方位ミラー5は、断面が球、放物線、双曲線等の形状を有する半円形状をなしており、シート部材6の略中央位置に装着されている。シート部材6は、全方位ミラー5が装着されている以外の部分の表面が単一色により着色されている。円筒部材7は、樹脂およびガラス等の透明材料からなり、その一端部に全方位ミラー5が取り付けられ、他端部にデジタルカメラ3が取り付けられている。
(もっと読む)
画像処理装置
【課題】部分画像を重ね合わせて全体画像を生成する画像処理装置において、重ね合わせの処理量を削減すると共に、重ね合わせた全体画像の画質の劣化を低減するために、重ね合わせ処理に使用する部分画像を適切に間引いて調整する。
【解決手段】全体画像データの生成に用いる部分画像データを保存する部分画像保存部4に保存された最新の部分画像データDTCとラインセンサ1で読み取った最新の部分画像データDT(i)をずらしながら重ね合わせ、有効な重なり位置が検出されたときにはラインセンサ1で読み取った部分画像データDT(i)を廃棄し、有効な重なり位置が検出されないときにはその部分画像データDT(i)を部分画像保存部4に格納する間引き判定部4を設ける。
(もっと読む)
車両用周辺監視装置
【課題】撮像素子に入射される光の輝度が高い場合にもピントの合った映像を得ることができる車両用周辺監視装置を提供することを目的とする。
【解決手段】車両周辺の映像を取得する映像取得部と、前記映像取得部の取得した映像を処理する信号処理部と、を有する車両用周辺監視装置であって、前記映像取得部は、第1の波長領域の光が選択的に入射される第1の撮像素子と、前記第1の波長領域よりも長波長の第2の波長領域の光が選択的に入射される第2の撮像素子と、を有し、前記信号処理部は、前記車両周辺の輝度を判定する輝度判定手段と、前記第1の撮像素子で撮像された第1の映像と、前記第2の撮像素子で撮像された第2の映像とを合成する映像合成手段と、を有し、前記映像合成手段は、前記輝度判定手段の判定結果に基いて、前記第1の映像及び前記第2の映像を所定の重みを付けて合成することを特徴とする。
(もっと読む)
パターン検査装置
【課題】繰り返しパターンを有する試料の外観検査において、欠陥検出精度が欠陥サイズに依らないパターン検査装置を提供する。
【解決手段】繰り返しパターンを有する試料の外観検査を行うパターン検査装置であって、画像データ中の注目画素に対して繰り返しパターンのパターンピッチの距離だけ離れた複数の画素を比較画素とし、前記比較画素が既に欠陥部と判定されていた場合には、前記欠陥部の比較画素の代わりに、前記注目画素からパターンピッチの整数倍離れ、かつ、既に正常部と判定された点を比較画素と再設定し、前記注目画素および前記比較画素の輝度データを大小で並び替えて中央値を設定し、前記注目画素の輝度データと前記中央値を比較することにより前記注目画素の良否判定を行うことを特徴とするパターン検査装置である。
(もっと読む)
シーンの深度データをキャプチャし、コンピュータのアクションを適用する方法
1つ以上のメディアソースを含む空間内で識別およびトラッキングされるユーザに対して事前定義された特権を自動的に適用するためのコンピュータ実装方法が提供される。前記方法は、ユーザプロファイルを定義してメモリに保存する操作を有する。前記ユーザプロファイルは、深度検知カメラによってユーザを識別およびトラッキングするためのデータを含んでもよい。あるいは、前記ユーザプロファイルに対して特定のメディアへのアクセスのレベルを定義する特権が定義されて保存される。また、前記方法は、前記深度検知カメラから、前記空間内のシーンの画像および深度データをキャプチャする操作を有する。更に別の操作では、前記画像および深度データから、前記シーン内で前記ユーザがトラッキングおよび識別される。あるいは、前記ユーザが前記シーン内で識別およびトラッキングされるときに、前記ユーザに対して1つ以上のメディアソースのうちの選択されたコンテンツへのアクセスが許可されるように、前記定義済みの特権が前記メディアソースに自動的に適用される。 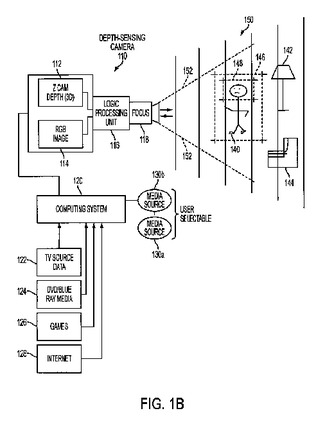 (もっと読む)
(もっと読む)
画像処理装置及び画像処理方法並びに画像処理方法を実行するプログラム及び記憶媒体
【課題】 超解像処理を行う画像処理装置において、要求された解像度の画像を出力する画像処理装置及び画像処理方法を提供する。
【解決手段】 基準となる設置位置に対して傾斜して取り付けられ、画素センサを2次元に配列することで形成されたエリアセンサと、1回の原稿画像の走査により原稿画像に対応する副走査方向に隣接した複数ラインの画像データにて主走査方向のずれが1画素未満である複数枚の画像分の画像データを読み取るエリアセンサ手段、エリアセンサ手段にて取得した画像データの傾斜を補正する補正手段、補正された画像データに対し補間処理を施すことで、画素センサの解像度より高い解像度の画像データを得る高解像度変換手段を有する画像処理装置で、エリアセンサ手段で得られる画像の最大枚数と原稿画像を出力する際の解像度の実現に必要な画像の必要画像枚数より原稿読み取り回数を算出し、算出回数分原稿画像を読み取ることを特徴とする。
(もっと読む)
車載用画像処理装置及び車載用画像表示装置
【課題】画像中の重要な物体を縮小画像中で強調し、かつ、ひずみの少ない縮小画像を得ることができる車載用画像処理装置及びその画像を表示する車載用画像表示装置を提供する。
【解決手段】自車両側後方の画像を側後方カメラから取得し(S100)、ミリ波レーダから他車両の位置、方向、速度を取得し(S105)、車速センサから自車両の速度を取得する(S110)。取得した他車両の速度と自車速度から他車両が自車両に接近している場合及び他車両の絶対速度が所定値以上の場合には他車両の部分の画像エネルギを他車両以外の部分の画像エネルギより高く設定する(S115)。その後、画像中の画像エネルギが所定の値以下の部分を結ぶSeamを算出し、Seamを削除して縮小画像を生成する(S120)。そして、算出した縮小画像を表示装置に表示する(S125)。
(もっと読む)
41 - 60 / 139
[ Back to top ]