
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
1,541 - 1,560 / 1,659
ビュー・モーフィング法の改良

【課題】 ビュー・モーフィング法を改良する方法を提供する。
【解決手段】 本発明による方法は、シーンの第1および第2の画像(30a、30b)を提供し、第1の画像から第2の画像への対応する点の間をマップする第1の視差マップ(32a、32b)を生成するために、第1および第2の画像にステレオマッチングアルゴリズム(31)を適用し、第2の視差マップ(33a、33b)を生成するために、第1の視差マップを第3の画像の座標の中に前方向マッピングする。さらに、第2の視差マップを使用し、第3の画像の少なくともいくつかのピクセルの各々にあり得る色値を取得するために、第3の画像の少なくともいくつかのピクセル位置を第1および第2の画像の対応する点に逆方向マッピングし、あり得る色値に基づいて第3の画像の少なくともいくつかのピクセルの各々に、最終的色値を指定し、シーンの新しいビュー(34a、34b)を提供する。
(もっと読む)
虚血性心疾患の超音波診断方法及び装置
心臓の左心室の異常を検出するための診断撮影方法及び超音波システムについて開示している。僧帽弁を含む画像のシーケンスが、そのシーケンスの画像各々における僧帽弁の場所を特定するように、取得されて処理される。そのシーケンスにおける現画像における及び先行画像における僧帽弁の場所を描く画像により、グラフィックが表示される。好適には、僧帽弁の場所は、それらの画像の各々における僧帽弁面の自動検出により特定される。連続的な異なる僧帽弁の各々の望ましいグラフィックカラー符号がそのグラフィックにおいて位置決めされる。それらの画像及びグラフィックを、左心室の伝導遅延及び梗塞の影響を識別するようにリアルタイムで観察することができる。 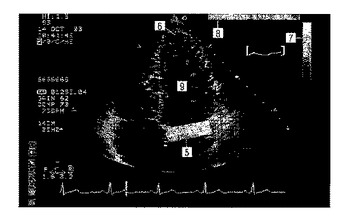 (もっと読む)
(もっと読む)
3次元形状入力装置および方法

【課題】 ストライプパターンから取得した点群データから被写体に忠実な3次元形状モデルを取得する。
【解決手段】 プロジェクタ10をONにし被写体50にストライプパターンを投影する。ストライプパターンが投影された被写体50を第2カメラ30で撮影し(S11),その後プロジェクタ10の投影をOFFにする。点群データ算出部602により撮像画像から点群データを算出し,点群データ間引き部608により被写体50上の点群の隣接点間の間隔が縦横で略等しくなるように点群データを間引く。評価用三角ポリゴン生成部604により,間引き後の点群データから三角ポリゴンを生成し,鋭角の三角ポリゴンを無効と判断して削除する。当初の点群データのうち,有効な三角ポリゴンに含まれる点群データを用いて三角ポリゴンを生成してそのデータを3次元モデリング部606に供給する。
(もっと読む)
肺結節を検出するための候補の作成方法
三次元ボリュームデータ内に候補を作成するための方法は、標識された前景ボクセル(101)を含む三次元ボリュームデータの二値ボリューム画像を形成するステップと、二値ボリュームデータ(102)の標識された前景ボクセルの複数の形状特徴を推定するステップであって、二値ボリューム画像の前景ボクセルからピークボクセルおよび高曲率ボクセルを識別し、境界および各ピークボクセルについての複数の信頼値を蓄積し、複数の信頼値から信頼ピークを検出して信頼ピークを候補点であると決定するステップと、検出された信頼ピーク(103)を前提として候補点を精緻化し精緻化された候補点を候補であると決定するステップとを含む。  (もっと読む)
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】指定された部位(臓器)の3次元画像データを容易に得ることを可能にする。
【解決手段】本発明の画像処理装置を適用した医用画像処理システム100では、患者を撮影した複数の2次元の断層像(CT画像)が取得され、取得された断層像が表示部2に表示され、その表示された断層像上で、3次元表示する箇所がマウス操作により指定される。そして、指定された箇所のCT値から、表示する部位のCT値の範囲が設定され、その設定された範囲に基づいて、当該指定された箇所を含む部位(臓器)の境界が断層画像別に算出される。次いで、各断層像の境界内のCT値から、ボリュームレンダリング法を用いて3次元画像データが生成され、その生成された3次元画像データに基づいて該当部位が表示部2に3次元表示される。
(もっと読む)
表層構造を視覚化するシステム
本発明は、物体(104、204、304)の表層構造を視覚化するシステム(100、200、300)を提供する。本システムは、物体(104、204、304)の複数の画像を撮影するカメラ(106、206、306)と、カメラ(106、206、306)が撮影する各画像に関連するそれぞれのロケーションを監視するロケーションモニタ(108、208、308)とを備える。本システム(100、200、300)はまた、マイクロプロセッサ(112、212、312)と、物体(104、204、304)の表層構造を表示するディスプレイ(114、214、314)と、マイクロプロセッサ(112、212、312)のためのソフトウェアルーチンとを備える。ソフトウェアは、複数の画像を処理するとともに、各画像に関連するそれぞれのロケーションを考慮に入れて、物体(104、204、304)の表層構造をディスプレイにより視覚化できるようにする。 (もっと読む)
合成画像を生成する画像取り込み・表示システム及び方法
画像取り込み・表示システムを開示する。一実施形態では、本発明は、被写体の画像を提供する画像取り込みシステム(10)を提供する。画像取り込みシステムは、平面と、第1のカメラ(14)と、第2のカメラ(16)と、制御モジュール(12)とを備える。第1のカメラは、平面と第1のカメラの間に位置する被写体との第1の被写体画像を取り込むように配置される。第2のカメラは、第1のカメラから離間され、被写体の第2の被写体画像を取り込むように配置される。制御モジュールは、第1のカメラと、第2のカメラと、平面との相対的な位置を使用して、仮想視点(54)からの被写体の合成画像を生成するように構成される。  (もっと読む)
(もっと読む)
3次元画像測定装置および方法
【課題】 計算量を増大させることなく凹凸の多い物体等に適切な解像度の3次元画像を得る。
【解決手段】 プロジェクタから第1の投影パターンを投影し(S10)、2台のカメラでその様子を撮影する(S11)。得られた画像から距離画像を算出する(S12)。この距離画像に対して水平方向の傾斜情報の評価を行し傾斜が急な部分や凸凹が細かく連続する部分などを抽出する(S13)。抽出した領域を領域テンプレートに当てはめ、第2の投影パターンを1つあるいは複数選択する(S14)。選択された投影パターンを投影して(S15)、2台のカメラでその様子を撮影し(S16)、得られた画像から距離画像を算出する(S17)。第2の投影パターンが複数選択された場合はこれを繰り返す(S18)。最後にそれぞれ算出された距離画像(点群データ)を合成して最終的な出力を得る(S19)。
(もっと読む)
顧客の要望に応じた衣服を作成するために用いられるバーチャル(仮想の意)3D(3次元)ボディ作成システム、及び、そのバーチャル3Dボディ作成システムを備えるオーダーメイド用型紙作成システム
【課題】
3Dスキャナシステムを各店舗毎に設置しなくても顧客の体型に即した3Dボディデータを安価にかつ簡単に得ることができるバーチャル3Dボディ作成システム、及びそのバーチャル3Dボディ作成システムを備えるオーダーメイド用型紙作成システムを提供すること。
【解決手段】
顧客を正面及び側面から撮影する撮影手段110と、その撮影結果に基づいて顧客2Dシルエットボディデータを作成するシルエット抽出手段120と、その顧客2Dシルエットボディデータから基準点データを抽出する基準点抽出手段120と、予め3Dスキャナシステムを用いた計測によって得られた複数の基準体3Dボディデータを記憶する3Dボディデータベース中から、顧客2Dシルエットボディデータと近似の基準体3Dボディデータを選択する近似データ選択手段130と、基準点データに基づいて、近似の基準体3Dボディデータを変形する変形手段130とを備えていることを特徴としている。
(もっと読む)
局所的独自パターンを使用した能動的ステレオ技術による3次元画像の取得
シーンの3次元画像を取得するシステム及び方法。当該システムは局所的独自パターン(LUP)をシーンに投影する投影デバイス及び2以上の観察位置の当該LUPを含む当該シーンの画像化のためのセンサーを有する。コンピュータデバイスは、ディスパリティマップを生成するためにパターンの局所的独自性を使用して当該画像にある対応するピクセルを整合させる。レンジマップはその後、画像化されたシーンにあるポイントを三角測量することにより生成され得る。  (もっと読む)
(もっと読む)
物体検出装置
【課題】画像上で複数の物体が接近し又は一部重複している場合でも、各物体を個別且つ安定に識別する。
【解決手段】検出されたトラック70の空間上での位置に基づいて物体位置領域82aを算出する。前時刻に記録された物体位置領域82aに相当するテンプレート80aを呼び出す。テンプレート80aを基準画像Ib上で類似度が最大となる位置に移動させる。物体位置領域82aと移動したテンプレート80aとの重なり割合(R(t-1)∩Rt)を算出する。重なり割合を用いて、過去に検出された物体と同一か否かを判断する。
(もっと読む)
平面検出装置及び検出方法
【課題】平面を規定する法線ベクトル及び基準とする撮像手段から平面までの距離を高精度且つ短時間で算出する。
【解決手段】基準カメラ12及び参照カメラ14間の回転行列及び並進ベクトルをパラメータ記憶部26から読み出し、射影変換行列算出部28において射影変換行列を推定した後、平面パラメータ算出部30において、射影変換行列を特異値分解して得られる射影変換行列の定数倍の不定性を示す係数と、前記回転行列及び前記並進ベクトルとを用いて、平面を規定する法線ベクトル及び基準カメラ12から平面までの距離を算出する。
(もっと読む)
画像生成方法および装置
【課題】 暗所の撮影や夜間撮影時に視点変換画像の合成対象撮像手段が撮像する際に効率的に必要な補助光を照射でき、認識度の高い視点変換画像を生成する。
【解決手段】 車両に配置された1又は複数の撮像手段から供給される画像情報に基づいて視点変換画像を生成する画像生成装置である。前記撮像手段による撮像領域を照射する補助光源を備え、この補助光源を視点変換画像毎に切り替えて使用する補助光源を選択する制御手段を設けた。
(もっと読む)
画像処理方法および画像処理装置
本発明の画像処理方法においては、基準画像と参照画像とを用いたステレオマッチングによって対象物の形状を復元するにあたり、基準画像および参照画像に対して、それぞれ所定の相関関係に基づいて対応付けされた複数のウィンドウを設定する。このとき、参照画像に設定されたウィンドウの並び順を基準画像における複数のウィンドウの並び順と一致させるように、参照画像における複数のウィンドウの並び順を修正する。並び順に基づいてマッチングの修正を行うため、基準画像と参照画像との間のステレオマッチングを容易に行うことができ、画像処理時間の短縮を図ることが可能となる。  (もっと読む)
(もっと読む)
肺潅流または肺密度を3D視覚化するためのシステムおよび方法、並びにその統計的分析方法
【課題】実質組織内の異常潅流または潅流減少または異常領域を高輝度表示し、これにより肺動脈塞栓または他の異常性を同定することのできる3Dマップ視覚化技術を提供することである。
【解決手段】両肺の3D視覚化方法において、
両肺と肺実質組織の画像データをセグメント化し、
3Dマップをセグメント化した画像データの関数として作成し、
3Dマップを色符号化された半透明3D容積としてレンダリングし、
不透明領域が対象エリアをハイライトする。
(もっと読む)
トボガンに基づいたクラスタの対象特徴描写システムおよび方法
デジタル化画像中の対象の特徴描写方法は、N次元空間内の複数の点領域に対応する複数の輝度を含むデジタル化ボリューム画像を準備するステップ(41)、上記デジタル化ボリューム画像中の一組の隣接する複数点から、1つの集中点を含むトボガンクラスタを形成するステップ(42)、上記トボガンクラスタから第1の層を抽出するステップ(44)、および、上記トボガン層から1つまたは複数の特徴を算出するステップ(45)を含む。  (もっと読む)
(もっと読む)
障害物検出装置及び方法
【課題】平面投影ステレオ法の、対応点探索を必要としなく、計算量上の実用性を維持しつつ、誤検出が生じる可能性を大幅に減少させる障害物検出装置を提供する。
【解決手段】走行車搭載のビデオカメラにより入力された左右の画像に基づいて道路面上における左右の画像の任意の点の対応関係を表すパラメータを求めるパラメータ計算部と、パラメータに基づいて、一方の画像の道路面上に設定された点が、他方画像上のどの点に対応するのかを計算する対応点計算部と、計算される点の対応関係を用いて一方画像に近似する変換画像を作成する画像変換部と、計算される対応点の対応関係及び変換画像を用いて、道路平面に対して実質的に垂直上方向に一定以上の大きさを有する物体を検出する検出部を含む。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】ボクセル・データからボリューム・レンダリングを行なって3次元画像を表示するときに、高周波成分を中心とする画像ノイズを確実に除去又は低減させるとともに観察上、重要な部位の情報は確実に確保し、その一方で、クリッピング処理に拠らずかつリアルタイム性を上げる。
【解決手段】ボリューム・レンダリングの投影面からの視線に基づいて当該投影面上の複数のピクセルそれぞれから伸びる光線を設定したときに当該光線上に位置するボクセル・データの1次元データを指定する(ステップS1−S4)。この1次元データのボクセル値の空間的な変化が大きくなるほど大きい絶対値を示す変化情報を演算し(ステップS5−S6)、この変化情報に応じて重み付け係数を演算し(ステップS7)、ボクセル・データと当該ボクセル・データの平滑化画像のデータとを重み付け係数を用いて相互に重み付け加算する(ステップS8−S10)。
(もっと読む)
平面検出装置及び検出方法
【課題】平面を検出するための画像間の射影変換行列を高精度且つ短時間で算出する。
【解決手段】基準カメラ12及び参照カメラ14間の回転行列及び並進ベクトルをパラメータ記憶部26から読み出し、射影変換行列算出部28において、前記回転行列及び前記並進ベクトルを用いて、基準カメラ12及び参照カメラ14によって撮像された画像に含まれる道路平面領域を重畳させることのできる射影変換行列を算出する。
(もっと読む)
移動体移動量算出装置
【課題】移動体と静止物とが混在する環境下において、移動体の速度を正確に計測をする。
【解決手段】基準カメラにより基準画像を撮像し、参照カメラにより参照画像を撮像する。基準画像及び参照画像から車両が走行する平面領域を抽出する。基準画像を用いて道路を上方から見たVPP画像IVを及び平面領域を上方から見たVPP平面画像IVfを生成する。異なる時刻間でのVPP画像IV(t)、IV(t-1)のうち平面の共通領域R(ΔX、ΔY)の範囲でVPP画像マッチングを行い、求められたずれ量から移動量を算出する。
(もっと読む)
1,541 - 1,560 / 1,659
[ Back to top ]