
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
1,601 - 1,620 / 1,659
超音波画像診断装置

【課題】生体内の3次元超音波画像上に指定された特定組織等の所望部位の体積を高精度かつ容易に計測できること。
【解決手段】生体内にて行った超音波スキャンによる3次元領域のエコーデータをもとに前記生体内の3次元超音波画像を生成出力する超音波画像診断装置において、前記3次元超音波画像上の所望部位を囲む複数点を指示入力する入力装置3と、前記複数点を順次連結する線に囲まれる領域内の全ポリゴン頂点を検出し、該全ポリゴン頂点の隣接する各ポリゴン頂点間を連結して形成される表面を取得するとともに、該表面の縁部を境界に該表面と連続しかつ該表面の開口を閉じる底面を設定し、前記表面と前記底面とによって閉じた3次元空間の断面画像をもとに前記所望部位の体積を演算出力する制御部12と、を備える。
(もっと読む)
危険領域を保護する方法および装置
【課題】自動動作機械の危険領域を、設置に大きな費用はかからないが、十分な信頼性をもって保護する。
【解決手段】危険領域(58)、特に自動動作機械(60)の危険領域を保護するために、危険領域(58)の画像は、互いにずれて配置される少なくとも第1および第2画像記録ユニット(16,18)を用いて記録される。場面の画像は、異なる3次元場面分析方法(46,44)を用いて、3次元場面分析を受け、かつ危険領域(58)は、場面分析方法(44,46)の少なくとも一つが異物を検出するとき保護される。  (もっと読む)
(もっと読む)
カラーセグメンテーションに基づくステレオ3次元再構成システムおよびプロセス

【課題】 あるシーンの3次元再構成を、そのシーンの複数の画像から、カラーセグメンテーションベースの手法に基づいて計算するためのシステムおよびプロセスを提供する。
【解決手段】 最初に、各画像が個別にセグメント化される。次いで、初期ディスパリティー空間分布(DSD)が、セグメント内のすべての画素が同一のディスパリティーを有するとの想定を用いて、各セグメントごとに計算される。次に、隣接セグメントと、そのセグメントの他の画像への投影とを用いて、各セグメントのDSDが精緻化される。次いで、各セグメントが単一のディスパリティーを有するという想定は、ディスパリティー平滑化ステージの間に緩和される。その結果、各画像ごとにディスパリティーマップが得られ、再構成アプリケーションが要求した場合には、そのマップを順に使用して画素ごとの奥行マップが計算される。
(もっと読む)
撮像装置
【課題】 マーカ等を必要とせずに非接触且つ現場計測可能であり、また、解析するために高性能のパーソナルコンピュータを必要としないスタンドアローン型の計測機能付きの撮像装置を提供する。
【解決手段】 撮像装置10は、少なくとも2つのディジタルカメラ111,112と、ディジタルカメラ111,112によって撮像された可視画像データに対して各種画像処理を施す画像処理部52と、少なくとも画像データを表示部12に表示させる主制御部54とを備える。画像処理部52は、撮像対象物を平面の集合体であるものと近似して2次元情報を取得する画像解析を、ディジタルカメラ111,112によって撮像された少なくとも2枚の可視画像データに基づいて行い、主制御部54は、画像処理部52によって算出された当該可視画像データ上の任意の2点間の寸法値データを表示部12に表示させる。
(もっと読む)
駐車車両検知方法及び駐車車両検知システム
【課題】 駐車車両の調査を、走行する調査車両を使用して効率的で精度良く行う。
【解決手段】 路上を走行する車両から路上の対象物を水平方向に複数回ラインスキャンしてエピポーラ平面画像(EPI画像)を取得する工程と、前記取得したEPI画像から、撮像した対象物に関する一以上の特徴軌跡を抽出する工程と、抽出した対象物の特徴軌跡の傾きを演算する工程と、演算した特徴軌跡の傾きと前記移動体の移動速度とに基づいて、対象物までの距離を演算する工程と、演算した対象物までの距離に基づいて駐車車両の有無を判別する工程とを備えた。
(もっと読む)
環境地図作成方法、環境地図作成装置、及び移動型ロボット装置
【課題】観測ノイズに対してロバストで且つ高さ方向に高解像度で環境を表現する。
【解決手段】環境地図作成装置1は、3次元の距離データを取得するステレオビジョンシステム2と、ステレオビジョンシステム2からのステレオデータD1が入力され、ステレオデータD1から環境内の平面を検出する平面検出器3と、平面検出器3から出力される平面データD2から環境地図を更新し、環境地図データD5を出力する環境地図作成部4とを備える。環境地図作成装置1は、3次元環境地図を作成し更新する3次元グリッド更新部41と、3次元環境地図と2次元の基準面からの高さを表す2.5次元高さ地図とを比較検証する高さ地図検証部42と、平面データD2と3次元グリッドの障害物確率データD3とから2.5次元高さ地図を更新する高さ地図更新部43とを備えることにより、観測ノイズに対して脆弱な2.5次元平面地図を3次元グリッドの高さ情報によって補完することで観測ノイズに対して高い耐性を有する環境地図作成が行える。
(もっと読む)
頬顎異常矯正学的手術のための治療計画を導出する方法及びそのための装置
【課題】 頭蓋計測及び/または人体計測分析を実施するための方法を提供する。
【解決手段】 頭蓋計測及び/または人体計測分析を実施するための方法は次の段階を含む:(1)3D医学画像モダリティを用いて人の頭の3Dスキャンを獲得する、(2)その3Dスキャンからのデータを用いて3D表面模型を生成する、(3)この3Dスキャンからこの3D表面模型に幾何学的にリンクした少なくとも一つの2D頭部X線像を形成する、(4)この少なくとも一つの2D頭部X線像及び/またはこの3D表面模型上に解剖学的標識点を示す、(5)この解剖学的標識点を用いてこの頭蓋計測及び/または人体計測分析を実施する。
(もっと読む)
道路標識認識装置
【課題】 CPU、撮像装置の能力、コストを抑制し、車両へ現実的に搭載でき、確実に道路標識を認識することができる道路標識認識装置を提供すること。
【解決手段】 自車前方を撮像するステレオカメラ5と、撮像した画像を撮像対象までの距離を示す距離画像に変換する距離画像作成部21と、撮像した画像から道路標識部分を認識するデータ探索部42と、複数の道路標識のデータを有するテンプレートデータと、画像の道路標識部分とテンプレートデータとのマッチングを行い、道路標識を認識する画像判定部44とを備える道路標識認識装置1において、自車と道路標識との距離により段階的にテンプレートサイズを変更するテンプレート拡大縮小部44を設け、画像判定部44は、自車と道路標識との距離により段階的に認識処理を行う。
(もっと読む)
画像処理装置とこれを用いた手術支援システム
【課題】操作者の作業量と操作者の主観判断への依存を極力減らし,断層画像から線状組織と塊状組織を分類する手術支援システムを提供する。
【解決手段】断層画像データ上に領域分割したい組織臓器に属する点を1点以上教示点として付与させる。線状組織と塊状組織で異なる情報を教示点に付与することで,組織臓器の解剖的特長に適した処理が可能になる。線状組織の領域分割を塊状組織の領域分割に先行して行うことで,後者の検出の精度を高める。線状組織の領域分割では,付与された教示点間の接続関係に基づき,教示点間を接続する組織の軸線と太さを決定して,各線状組織に属する領域を決定する。塊状組織の領域分割では,容易に分割可能な外包領域と内部領域への分類の後に,未分類の点を既分類の区分に帰属させる演算を繰り返し,未分類の点がなくなるまで反復する。
(もっと読む)
画像処理方法および装置並びにプログラム
【課題】MIP処理等の3次元医用画像から投影画像を生成する画像処理において、特定のハードウェアを必要とせず、また、投影画像の画質を実用に耐えうるレベルで維持しつつ、処理の高速化を可能にする。
【解決手段】MIP処理の場合、投影画像を構成する投影画素と視点と3次元医用画像とを通る視線上に複数の探索点を設定する際に、処理対象の探索点において、その視線で処理済の探索点中での最大画素値が更新されたかどうかを評価し、更新された場合には、その探索点とその次の探索点との間のステップ幅を、更新されなかった場合のステップ幅よりも小さくする。これにより、視線に沿った画素値変化の一例を表す図では、最大画素値が更新される可能性が高い実線部分では詳細な探索が行われ(画質レベルの維持)、更新される可能性が低い一点鎖線部分では粗い探索が行われる(処理の高速化)。
(もっと読む)
識別方法、コンピュータプログラム及びコンピュータプログラム装置
CTスキャン画像中の病巣と壁との間の接合の検出方法において、内部空間(L)に対して前記壁の境界(B)を決定し、前記境界に沿った特異点(c1 ,c2 )を識別し、及び前記壁と前記病巣との間の接合点として、病巣のどちらかの側の1つの特異点を選択することを特徴とする方法が提供される。特異点は、境界の極大曲率の点及び直線と湾曲部との遷移点であってよい。特異点は、病巣の両側の第1および第2シード点(p1 ,p2 )を受付け、それらが既に境界上にあるわけではない場合にシード点を境界に対して移動し、シード点に最も近い特異点を探索することによって選択されてよい。シード点は、決定された接合点(j1 ,j2 )を隣り合うスライス画像から現在のスライス画像に移すことで決定してよい。 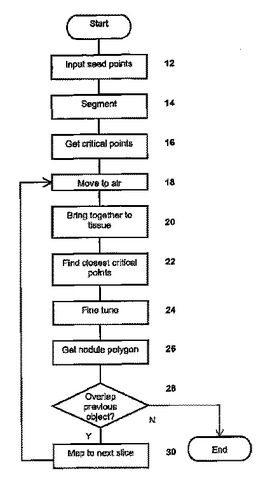 (もっと読む)
(もっと読む)
画像処理装置及びロボット装置ならびに車両誘導装置
【課題】
画像処理装置において、広い範囲にある対象物に対して、屋外や強い照明下においても安定して形状復元する。
【解決手段】
画像処理装置において、画像入力手段1aが時系列的に入力した画像上の特徴的な点の位置関係の変化を第1の計算手段1bが抽出する。位置関係の変化から特徴的な点の三次元位置と画像を捉えた際の視点の位置と方向を第2の計算手段1cが計算する。入力した画像と特徴的な点の三次元位置とから画像に捉えられている物体の三次元形状データを第3の計算手段が計算する。
(もっと読む)
視覚情報処理装置および適用システム
【課題】
アズビルト3D−CADデータをリアルタイムで自動生成して利用することができる視覚情報処理装置及びその応用システムを提供する。
【解決手段】
移動可能な撮像装置の画像情報を入力とし、入力画像を処理して移動空間に存在する物体のCADデータを自動的に生成する機能と自動的に更新する機能を持たせる。また、CADデータの探索指令信号を入力とし、その指令信号に基づきCADデータを探索する機能と、探索したCADデータの情報を出力する機能を持たせる。更に、その視覚情報処理装置をロボット制御装置などと組み合わせて自律制御型の各種自動機械を構成する。
(もっと読む)
投影画像処理方法、投影画像処理プログラム、投影画像処理装置
【課題】 投影画像の画質を向上させることのできる投影画像処理方法、投影画像処理プログラム、投影画像処理装置を提供する。
【解決手段】 CT画像等から作成されたボクセルデータに、2次元画面を構成するピクセル毎に視線方向を示すレイを入力した。次に、レイ上のボクセルのボクセル値のうち最大のボクセル値をMIP値としてMIP値グリッド記憶部に記憶し、MIP値を持つボクセルの座標をMIP位置としてMIP位置グリッド記憶部に記憶し(ステップS25)、そのMIP位置の形状から雑音位置を判定した(ステップS70)。そして、雑音位置のボクセル以外のボクセルデータについて同様にMIP値及びMIP位置を算出して、それぞれMIP値グリッド記憶部及びMIP位置グリッド記憶部に記憶し、そのMIP値グリッド記憶部に記憶したMIP値に対して後処理をすることにより(ステップS125)、雑音がほぼ除去されたMIP画像を得る。
(もっと読む)
カメラ・ポーズを決定する方法および装置
(例えばコンピュータ・ビジョン・システムで使用される)6つの自由度で特徴付けられるカメラ・ポーズを決定する方法および装置が開示される。一実施形態では、カメラでキャプチャされたイメージが受領され、潜在的ポーズに関する少なくとも2つの制約が、カメラに対するイメージの既知の関係に従って実施され、それによって潜在的ポーズが、残りの2つの自由度に制限される。次いで、少なくとも1つの潜在的ポーズが、その残りの2つの自由度に従って決定される。 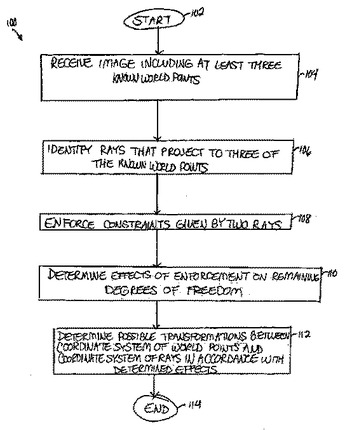 (もっと読む)
(もっと読む)
気管気管支樹を表示する方法及び装置
本発明は、気管気管支樹(400)の自動的セグメント化及び表示、並びにセグメント化された気管気管支樹(400)に関連した医療値の表示に関する。  (もっと読む)
(もっと読む)
ビデオフラッシュライトを実行する方法およびシステム
没入型監視システムでは、多数のカメラとその他のセンサからのビデオ又はその他のデータが、場面のレンダリング2D又は3Dモデル内にデータを重ね合わせるビデオ処理システムにより処理、表示される。システムは、ユーザが、サイトをそこから見るための視点を選択的に識別することができるように構成された視点セレクタを有する。ビデオ制御システムは、視点を識別するデータを受け取り、その視点に基づいて、その視点からの視界に関連するビデオを生成する複数のカメラのサブセットを自動的に選択し、そのカメラのサブセットからのビデオを、ビデオ処理システムに送信させる。視点が変化するにつれて、ビデオプロセッサと通信を行うカメラが変更されて、新しい位置に関連するビデオを生成するカメラに引き渡される。没入型環境における再生が、タイムスタンプ付きのビデオ記録の同期によりなされる。 (もっと読む)
画像処理をするための方法、コンピュータプログラム、装置及びイメージングシステム
本発明は、画像を処理するための方法に関し、この方法は、前記画像内にある細部に位置決め誤差の値を割り当てるステップ、前記位置決め誤差の前記値を映像化するステップ、前記値の対話形式の調節を可能にするステップ、及び前記細部の位置に対して前記位置決め誤差の値を記憶するステップを有する。この方法のステップ1aにおいて、画像1、2つの細部2a及び2bが識別されている。これら細部は大腿骨3の外面と重なるように位置決めされる。これにより各細部は、例えば適当な楕円4a及び4bを用いて、ユーザに視覚化される位置決め誤差の値を割り当てられる。位置決め誤差の夫々の値は、適切な入力手段を使用してユーザにより手動で採用される。代わりに、この位置決め誤差の値が画像品質を示すパラメタに基づいて細部に割り当てられることも可能である。さらに代わりには、画像内にある全ピクセルが位置決め誤差の初期デフォルト値を割り当てられることが可能であり、これは画像1が取得したイメージングモダリティに対応している。ユーザは位置決め誤差の値を対話形式で調節する手段を備えている。この目的のために、例えばユーザはカーソル8を用いて前記楕円の夫々の境界をドラッグし、これにより位置決め誤差の対応する値を変更する。この位置決め誤差の値は、画像内にある細部の座標と一緒に記憶される。これにより、前記位置決め誤差にリンクした細部の何れかに関する計測が実行される場合、この計測結果は、位置決め誤差の値から得られた不確定性の値を備える。これはウィンドウ9に概略的に説明され、画像細部2aと2bとの間の距離の測定結果をフィードバックする。ユーザは、細部2a及び2bに対する、これらを拡大した位置決め誤差のエリア4a、4bを再規定することにより、位置決め誤差の割り当てられた値を調節してもよい。ウィンドウ9bに示される計測の不確定性の対応する読み取り値がそれに応じて変化する。  (もっと読む)
(もっと読む)
マンモグラフィにおけるコンピュータ解析用ワークステーション
マンモグラム記録を分離及び照合・配置する方法は、スキャンされたときに自身をセパレータフィルムとして識別させる識別可能な特徴を有するセパレータフィルムを供給してスキャンすることにより、異なる患者のマンモグラムを分離することを支援するステップを含んでいる。セパレータフィルムは、異なる患者のマンモグラムを分離しているセパレータフィルムとして自身が識別されるように、ワークステーションの処理手段によって認識可能な少なくとも1つの識別可能な特徴を有する。また、放射線フィルムマンモグラムを照合・配置するワークステーションシステムは、放射線フィルムマンモグラムをデジタル化してセパレータフィルムをスキャンするスキャナを含んでおり、セパレータフィルムが、自身をセパレータフィルムとして識別させる識別可能な特徴を備え且つ異なる患者のマンモグラムを分離するのに有用である。 (もっと読む)
画像内にあるオブジェクトのスケーリングを可能にするための画像処理装置、イメージングシステム、コンピュータプログラム及び方法
本発明は画像内にあるオブジェクトをスケーリングする画像処理装置に関する。前記画像処理装置は、マーカの実際の寸法と、画像内にあるこのマーカのピクセル単位での寸法との間の関係から得られる較正係数に基づいて前記オブジェクトをスケーリングするキャリブレータを有し、ここでキャリブレータはさらに、前記画像内において識別される複数の異なる配向のマーカを使用して得られる複数の較正係数を生成する。画像(I)は、解剖学的構造(2)対してこれらオブジェクトの異なる位置合わせとなる、空間において異なって配向される複数のオブジェクト(3、8、9)を有する。前記オブジェクト(3)は計測ツールにリンクされ、これは前記オブジェクト(3)のピクセル単位での長さを計測し、マーカ(A)から決められる較正係数を使用して、前記オブジェクト(3)の実際の寸法を計算する。前記マーカは空間においてオブジェクト(3)と同様に位置合わせされる。画像(I)はさらに、計測ツールにリンクされるオブジェクトを有し、これは、これらオブジェクトのピクセル単位での夫々の長さに基づいてこれらオブジェクト(8、9)の実際の長さ、及び前記マーカ(B)を使用して決められる較正係数を計算する。好ましくは、別々のマーカに対応するオブジェクトがグループ化され、較正グループを形成し、これにより、較正係数の更新が同じ較正グループ内にある全てのオブジェクトに対する実際の寸法の自動更新となる。好ましくは、各較正グループはユーザの便宜に対し別々に識別される。本発明はさらに、画像内にあるオブジェクトのスケーリングを可能にするためのイメージングシステム、コンピュータプログラム及び方法にも関する。 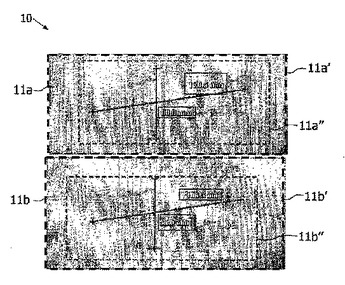 (もっと読む)
(もっと読む)
1,601 - 1,620 / 1,659
[ Back to top ]