
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
1,521 - 1,540 / 1,659
器官内の塞栓症により冒されている領域を分析するための自動化された方法および装置ならびに器官内の塞栓症により冒されている領域を分析するためのコンピュータプログラムコードが記憶されているコンピュータ読み取り可能媒体
【課題】器官内の塞栓症により冒されている領域を分析するための自動化された方法を提供する。
【解決手段】方法が、画像体積データを使用して器官の血管系の分節された画像を形成するステップと、分節された画像内の塞栓ポイントを識別するステップと、塞栓症によって冒されている器官の体積を自動的に求めるステップとを包含する。
(もっと読む)
解剖学的構造のセグメント化方法

【課題】4D画像データセット全体からのセグメント化を高速化し、セグメント化の結果の信頼性を向上させる。
【解決手段】先ず一連の3D画像データセットにおける最初の3D画像データセットから解剖学的構造(3〜7)がセグメント化される、時間順に記録された一連の3D画像データセットからの解剖学的構造(3〜7)のセグメント化方法において、一連の3D画像データセットにおける他の3D画像データセットから解剖学的構造(3〜7)をセグメント化する際に、周囲に存在する解剖学的対象に対するセグメント化すべき構造の既知の空間的関係と、一連の3D画像データセットにおいてその都度すぐ隣にあり既に構造がセグメント化された3D画像データセットのセグメント化結果とに基づいて、セグメント化の探索空間(9)が制限されるおよび/または空間的関係を割り付けられたセグメント化パラメータが使用される。
(もっと読む)
複数の映像ラインを利用した映像整合方法及びそのシステム

【課題】垂直方向への両眼差ノイズを減少させることができる映像整合方法を提供する。
【解決手段】本発明は、一対の2次元映像から3次元の空間情報を再創出する映像整合方法を提供する。この時、映像整合のために両眼差を利用するが、既存の映像整合方法では両眼差の値で垂直方向へのノイズが激しい。本発明では、両眼差を計算する時に隣接する映像ラインの両眼差の情報を制約条件として使用するので、垂直方向へのノイズを除去することができる。そして、両眼差を差動コーディング方式で圧縮して圧縮率を高めることができる。
(もっと読む)
血管構造の3D画像データセットからなるプラーク沈着の可視化方法
【課題】評価の改善を可能にする。
【解決手段】セグメント化された画像データを得るために、3D画像データセットにおいてプラーク沈着7を有する血管構造4の少なくとも一部分5がセグメント化される、血管構造、特に冠状血管の3D画像データセットからなるプラーク沈着の可視化方法において、セグメント化された画像データから、血管構造4の少なくとも一部分5およびプラーク沈着7の人工的な3Dモデル画像12,13が作成され、この人工的な3Dモデル画像12,13は血管構造4およびプラーク沈着7の境界面のみを含み、人工的な3Dモデル画像12,13の作成は、3Dモデル画像のための画素に一様な網目を得るために、血管構造の境界面に属する画素間およびプラーク沈着7の境界面に属する画素間の空間的補間によって行われ、人工的な3Dモデル画像12,13またはその部分ボリュームが可視化される。
(もっと読む)
3D画像データからの解剖学的構造のセグメント化方法
【課題】解剖学的構造の正確で確実なセグメント化を可能にする。
【解決手段】先ず3D画像データにおいて始点が設定され、少なくとも1つの既知の解剖学的特徴点(6,9)および/または少なくとも1つの既知の解剖学的特徴表面(11)が3D画像データにおいて識別され、
引続いて構造(5)が始点から出発して画素ごとに複数のセグメント化ステップで、各セグメント化ステップにおいて自動的に解剖学的特徴点(6,9)および/または解剖学的特徴表面(11)に対する相対的な瞬間的距離が求められ、距離に依存してセグメント化パラメータおよび/またはセグメント化の続行のための隣接画素からの選択が既知のモデルトポロジーを考慮して決定されるようにセグメント化される。
(もっと読む)
正射投影画像の形成システム
【目的】本発明は、高精度のカメラを使用する必要がなく、また飛行機による航空写真の撮影を必要とせず、もって天候に左右されず、撮影費用も安価となり、トータル的にもコストがきわめて安価な正射投影画像を得ることが出来、ひいてはリニューアルすべき建築構造物についての図面(正射投影図)をきわめて容易に得ることが出来る正射投影画像の形成システムを提供することを目的とするものである。
【構成】本発明は、正射投影画像の形成システムであり、撮影対象物につき撮影位置を異ならせて複数地点からデジタルカメラで撮影した複数の画像情報と、撮影対象物の3次元座標情報とを用い、撮影対象物の所定位置における3次元座標情報に対応する画像情報上での画像座標情報を求め、
求められた画像座標情報に対応するRGB値を取得して撮影対象物の正射投影画像を形成することを特徴とする。
(もっと読む)
フラグメントシェーディングパイプラインにおけるスケーラビリティの向上
フラグメントプロセッサは、フラグメントシェーダー分配器と、フラグメントシェーダー収集器と、複数のフラグメントシェーダーパイプラインとを備える。各フラグメントシェーダーパイプラインは、フラグメントのセグメントに対してフラグメントシェーダープログラムを実行する。複数のフラグメントシェーダーパイプラインは、平行して動作し、同一又は異なるフラグメントシェーダープログラムを実行する。フラグメントシェーダー分配器は、ラスタライズユニットからフラグメントのストリームを受け取り、選択されているフラグメントシェーダーパイプラインの容量に達するまで、フラグメントストリームの一部を、選択されているフラグメントシェーダーパイプラインに送る。次いで、フラグメントシェーダー分配器は、別のフラグメントシェーダーパイプラインを選択する。各フラグメントシェーダーパイプラインの容量は、何種類かのリソースによって制限される。フラグメントシェーダー分配器は、フラグメントを送るときに、選択されているフラグメントシェーダーパイプラインの残りの利用可能なリソースを追跡する。フラグメントシェーダー収集器は、複数のフラグメントシェーダーパイプラインから、処理されたフラグメントを取得する。 (もっと読む)
情報処理装置、撮影システム、吸収係数補正方法、及びコンピュータプログラム
【課題】 ビームハードニング補正を行うに際し、任意の透過厚のデータを容易に得られることができるようにする。
【解決手段】 水ファントム31の投影データD6のセンターラインCLと、管球2aとに対して平行に再構成されたセンター断層画像801を、画像データサーバ6から読み出し、読み出したセンター断層画像801を円として2次元モデリングし、2次元モデリングした円の半径と中心の座標を用いて、管球2aとセンサ2bとモデリングした円との再配置を行い、再配置した円と、X線が管球2aからセンサ2bへ到達するまでのパスPHとの交点A、Bを求め、その交点A、Bから水ファントム31の透過厚を求める。これにより、X線が被検体1を透過した際の減弱特性を測定するために、透過厚に対するセンサ2bの出力値のデータをより多く、簡単に収集することができる。
(もっと読む)
データ処理方法及びプログラム
【課題】
曲線又は曲面モデルを同定する際に的確なスムージングを行うためのデータ間引き処理を行うことができるデータ処理方法及びプログラムを提供する。
【解決手段】
入力される例えばK個のデータの各データ間におけるデータ間距離を算出し(ステップS1)、その最小値を選択し、この最小データ間距離を与えるデータ対を抽出し(ステップS2)する。そして、抽出したデータ対の一方を削除して間引き処理を実行する(ステップS3)。その後、間引き処理後に残ったデータの配置具合の間引き処理後のデータ群の最小データ間距離等を評価指標として算出し(ステップS4)、この評価指標に基づき、間引き処理を継続するか、間引き処理を打ち切り、処理済みのデータを使用して曲面モデルの生成をする。
(もっと読む)
物体検出装置
【課題】 演算量を低減する物体検出装置を提供することを課題とする。
【解決手段】 互いに視点の異なる複数の撮像画像を出力する撮像手段と、互いに視点の異なる画像間の対応付けを行う対応付手段とを備え、対応付けによって得られる視差から物体を検出する物体検出装置において、撮像画像を低解像度画像に変換する解像度変換手段と、低解像度画像による対応付けで得られた各対応点の視差が所定の視差以下か否かを判定する判定手段とを備え、高解像度画像による対応付けを行う場合、低解像度画像による対応付けで得られた対応点の位置に対応する高解像度画像の位置の近傍を探索範囲として設定して高解像度画像における対応付けを行い、判定手段により対応点の視差が所定の視差以下と判定した場合、対応点の視差が所定の視差より大きいと判定した場合より探索範囲における視差が少ない方向に対応する範囲を小さく設定することを特徴とする。
(もっと読む)
2次元幾何学歪測定・パラメータ化・補正手法とそのコンピュータプログラム
【課題】
非破壊検査などでは、物体の透過データを測定して、画像処理により物体の2次元もしくは3次元の画像を作成、画像から物体上での対象物の位置、あるいは大きさなどの計測を行う。透過データを検出する検出面には幾何学歪がある場合、透過データに幾何学歪が内在する。従来の手法はこの検出面の幾何学歪を測定する手段と物体座標―画像座標を関連づける測定を個別に行っていたため、測定が煩雑でより誤差を含む課題があった。
【解決手段】
本発明では、物体座標を測定する物体基準治具と、検出面幾何学歪および検出座標と物体座標を同時に関連図ける検出面基準治具との組み合わせで、検出面の幾何学歪の計測と物体座標―画像座標との関連づけを同時に測定することを実現するため、より簡便で高精度な補正パラメータの測定とその補正パラメータを用いた幾何学補正を達成する。
(もっと読む)
X線CT装置、画像データ領域抽出システムおよび画像データ領域抽出プログラム
【課題】簡易にCT値に応じてX線CT画像データから領域を抽出し、抽出した領域内外における3次元投影画像データを作成することが可能なX線CT装置、画像データ領域抽出システムおよび画像データ領域抽出プログラムである。
【解決手段】生データ収集手段と、3次元画像再構成手段と、閾値設定手段と、3次元画像データの現存領域を設定するとともに閾値に基づいて閾値領域を抽出する領域管理手段と、現存領域に含まれる3次元画像データから3次元投影画像データを作成して表示させる3次元投影画像表示手段と、3次元投影画像から削除あるいは表示させるべき領域の開始点を指定する連結領域抽出開始点指定手段と、開始点に連結する閾値領域を連結領域として求める連結領域抽出手段と、現存領域のうち連結領域以外の領域あるいは連結領域を現存領域の更新情報として領域管理手段に与えることにより現存領域を更新させる抽出連結領域削除手段とを有する。
(もっと読む)
医用画像処理方法、医用画像処理プログラム及び医用画像処理装置
【課題】時間軸上の全ボリュームデータの芯線の点列データを自動抽出できる医用画像処理方法、プログラム、装置を提供する。
【解決手段】時間軸方向に複数有するボリュームデータ群を保存して、そこから第1時刻と第2時刻におけるボリュームデータを取り出し、被検体の管状構造物の第1時刻における芯線点列データを保存し、それに基づき、第1時刻の芯線点列データの各芯点について、この芯線の接線方向の直交断面における管状構造物の断面像データ及び第2時刻のボリュームデータに基づき直交断面と同一の断面における管状構造物の断面像データを求め、管状構造物の第1時刻と第2時刻における断面像データの相関が最大となるベクトルを算出し、算出されたベクトルにより第1時刻の芯線点列データの各点を第2時刻における芯線点列データ対応する点とし、すべての点について移動ベクトルを求めることにより第2時刻における芯線点列データを得る。
(もっと読む)
三次元画像処理装置および三次元形状データ生成装置
【課題】 対象物の複数領域の形状をそれぞれ測定することによって得られるデータから効率的にポリゴンメッシュを生成する。
【解決手段】 三次元画像処理装置は、対象物Oを複数の領域に分割して生成されたデータであって該対象物上の各点を表す第1のデータから、該各領域上の各点を表す第2のデータを生成するデータ生成手段120を有する。さらに、該第2のデータを用いて対象物に対するポリゴンメッシュを生成するポリゴンメッシュ生成手段120を有する。該ポリゴンメッシュ生成手段は、上記複数の領域のうち第1の領域に対する第2のデータにおいて相互に隣り合う2つの点と、該第1の領域と隣り合う第2の領域に対する第2のデータにおける1つの点とを用いて、ポリゴンメッシュを構成するポリゴンを生成する。
(もっと読む)
リアルタイム3次元超音波診断システム用レンダリング装置及び方法
【課題】 3次元超音波映像とそれに対する2次元超音波映像をリアルタイムでレンダリングする速度と3次元データをスキャン変換する速度を向上させることができるリアルタイム3次元超音波診断システム用レンダリング装置及びその方法を提供する。
【解決手段】 本発明はリアルタイム3次元超音波診断システム用レンダリング装置及びその方法に関し、対象体の超音波映像がディスプレイされるビュー操作の有無に基づいて対象体に対するレンダリング方法を区分してレンダリングする。
(もっと読む)
画像処理装置および画像処理方法
【課題】遠景や近景といった画像に写し出された景色に左右されず、無限遠におけるオプティカルフローを推定する。
【解決手段】ステレオカメラ(カメラ2,3)は、移動体に搭載されており、移動体周囲の景色を撮像することにより、一対の画像データを時系列的に出力する。ステレオ画像処理部7は、一対の画像データを処理対象とした二次元マッチングに基づいて、視差dを算出し、これにより、距離データDを出力する。認識部11は、距離データDに基づいて、複数の立体物Onを認識し、立体物Onのそれぞれの三次元位置を特定。検出部12は、一対の画像データのうちの一方の画像データにおいて、時系列的な前後関係にある一対の画像データを処理対象とした二次元マッチングに基づいて、立体物のそれぞれのオプティカルフローOFを検出する。そして、演算部13は、複数の立体物Onの並びと、それぞれの立体物Onの視差dとオプティカルフローOFとに基づいて、無限遠におけるオプティカルフローOFinfを推定する。
(もっと読む)
時間的変化を伴う構成の構造体を表示する画像形成システム
本発明は、時間的に変化する構成の構造体を示す画像データを表示する画像形成システムに関する。この画像形成システムは、構造体の変化する構成を示すデータを処理し、予め選択した構成による当該構造体の基準画像を有する表示を奏し、時間につき構成が変化する当該構造体の変化する画像に、その基準画像を重ねる表示処理手段を有する。 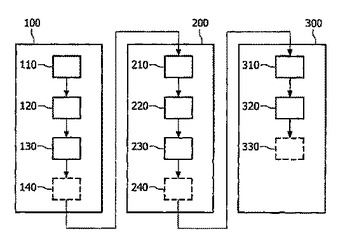 (もっと読む)
(もっと読む)
ビュー・モーフィング法の改良
【課題】 ビュー・モーフィング法を改良する方法を提供する。
【解決手段】 本発明による方法は、シーンの第1および第2の画像(30a、30b)を提供し、第1の画像から第2の画像への対応する点の間をマップする第1の視差マップ(32a、32b)を生成するために、第1および第2の画像にステレオマッチングアルゴリズム(31)を適用し、第2の視差マップ(33a、33b)を生成するために、第1の視差マップを第3の画像の座標の中に前方向マッピングする。さらに、第2の視差マップを使用し、第3の画像の少なくともいくつかのピクセルの各々にあり得る色値を取得するために、第3の画像の少なくともいくつかのピクセル位置を第1および第2の画像の対応する点に逆方向マッピングし、あり得る色値に基づいて第3の画像の少なくともいくつかのピクセルの各々に、最終的色値を指定し、シーンの新しいビュー(34a、34b)を提供する。
(もっと読む)
虚血性心疾患の超音波診断方法及び装置
心臓の左心室の異常を検出するための診断撮影方法及び超音波システムについて開示している。僧帽弁を含む画像のシーケンスが、そのシーケンスの画像各々における僧帽弁の場所を特定するように、取得されて処理される。そのシーケンスにおける現画像における及び先行画像における僧帽弁の場所を描く画像により、グラフィックが表示される。好適には、僧帽弁の場所は、それらの画像の各々における僧帽弁面の自動検出により特定される。連続的な異なる僧帽弁の各々の望ましいグラフィックカラー符号がそのグラフィックにおいて位置決めされる。それらの画像及びグラフィックを、左心室の伝導遅延及び梗塞の影響を識別するようにリアルタイムで観察することができる。 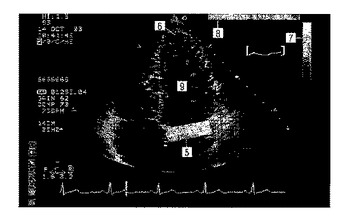 (もっと読む)
(もっと読む)
3次元形状入力装置および方法
【課題】 ストライプパターンから取得した点群データから被写体に忠実な3次元形状モデルを取得する。
【解決手段】 プロジェクタ10をONにし被写体50にストライプパターンを投影する。ストライプパターンが投影された被写体50を第2カメラ30で撮影し(S11),その後プロジェクタ10の投影をOFFにする。点群データ算出部602により撮像画像から点群データを算出し,点群データ間引き部608により被写体50上の点群の隣接点間の間隔が縦横で略等しくなるように点群データを間引く。評価用三角ポリゴン生成部604により,間引き後の点群データから三角ポリゴンを生成し,鋭角の三角ポリゴンを無効と判断して削除する。当初の点群データのうち,有効な三角ポリゴンに含まれる点群データを用いて三角ポリゴンを生成してそのデータを3次元モデリング部606に供給する。
(もっと読む)
1,521 - 1,540 / 1,659
[ Back to top ]