
Fターム[5B057CA13]の内容
画像処理 (340,757) | 処理部 被処理対象画像の特性 (80,570) | 3次元、ステレオ画像 (1,659)
Fターム[5B057CA13]に分類される特許
1,621 - 1,640 / 1,659
結節境界の検出方法
スキャン画像中に存在する肺の結節に関して結節の範囲を検出する方法であり、結節を含む一定範囲の画像を前景画像と背景画像とに精密分離し(14)、その前景画像中の空隙を充填し(16)、その前景画像を更に領域拡張し(18)当初の注目領域を特定する。次にその当初の注目領域を拡げ、周囲にある背景画像を含むが他の前景画像は含まない範囲までこの注目領域を拡張することによってマスクを設定し(20)、この注目領域内の一点に途中で途切れることなく接続し、かつ、設定したマスク内に存在する部分に関わる空間マップを決定する(26)。そのマスク内において領域拡張を行い(28)、この領域拡張処理と並行して最大周縁部特性コントラストを求める(30)。最大周縁部特性コントラストに基づき結節の範囲を特定する(32)。結節の位置はユーザが特定した結節の芯点であっても良い(12)。ただし結節の構成部分として特定される範囲が、ユーザにより特定された芯点の位置の微妙な違いによって左右されることを避けるため、芯点の探索処理を繰り返して、その都度最適な芯点を決定することが最も好ましい(22,24)。  (もっと読む)
(もっと読む)
三次元変形メッシュモデルを用いてオブジェクトの三次元ツリー状管状表面を自動セグメント化するための画像処理システム
三次元画像においてツリー状管状構造の全自動セグメント化のための演算手段を有する画像データ処理システムであって、ツリー状管状構造のツリー状中心経路を演算する手段(20)と、ツリー状管状構造のツリー状中心経路をポイントを形成したセグメントに分割する手段(21)と、ツリー状中心経路の個々のセグメントのために、セルを構成する一般円筒形メッシュを生成する手段(40)と、2つの一般円筒形メッシュを一体化する手段(50)と、を有する画像データ処理システム。 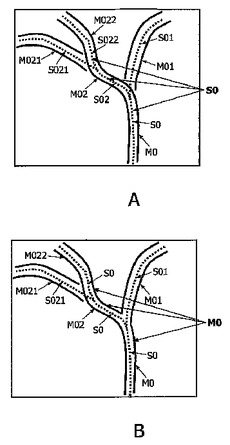 (もっと読む)
(もっと読む)
結節の検出方法
三次元スキャン画像中に存在する結節の検出方法であり、そのスキャン画像内の各位置において球形度係数を算出し(12−16)、算出した球形度係数に高球形度側閾値を適用して結節候補領域を特定し(18)、低球形度側閾値を使用して結節候補領域から領域拡張処理を実行して、結節候補領域に連なって球形度がより低い部分を含む拡張領域を決定する(20)。拡張領域に球形フィルタを重ね比べて、画像に球形フィルタリングをかけても良い。  (もっと読む)
(もっと読む)
情報強調された画像誘導介入
介入的及びリアルタイム超音波情報と、例えばX線回転血管造影法により提供される血管又は腫瘍脈管化の非リアルタイムな生体構造情報とのリンク付けは、高い計算性能を必要とする。本発明の側面によれば、超音波基準画像が異なる画像化システムにより得られる高品質画像に関して較正される。そして、操作的な介入の間、その介入の間得られるデータセットの位置合わせ又は較正が、(従来技術のデバイスにおける)高品質画像に対してではなく、基準画像に対して行われる。有利なことに、これは、高品質画像とリアルタイム画像との高速な融合を可能にすることができ、従って、患者に関して行われる操作的な介入の改良されたトラッキングを可能にすることができる。  (もっと読む)
(もっと読む)
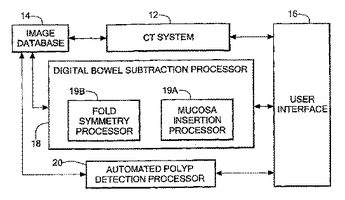
腸控除システムにおける画像処理のための方法および装置
結腸の画像における腸のひだを処理するためのシステムおよび方法が記載される。結腸の画像中で腸の中心線を見出すための方法およびポリープを検出するための方法も記載される。
 (もっと読む)
(もっと読む)
ボリューム画像のパノラマビュー画像の作成システムおよび方法
対象のボリューム画像のパノラマ投影を作成するためのシステムおよび方法が開示されている。仮想カメラが当該対象内の立方体空間の中心に配置される。このカメラから取得された画像が単一平面上に投影される。前方の画像が、平面の中心にあるウインドウ内にマッピングされる。立方体空間の左方、右方、上方および下方の画像が、この矩形ウインドウの周囲に、左方、右方、上方および下方の画像が矩形ウインドウを取り囲む連続画像を形成するようにマッピングされる。  (もっと読む)
(もっと読む)
PCIエクスプレスを用いたグラフィックデバイスのクラスタリング

ブロードキャストアパーチャーに関連するブリッジがプロセッサと多数のグラフィックデバイスの間でレンダリングコマンド及びデータを転送することを容易にする。ブリッジは、プロセッサによりブロードキャストアパーチャーに書き込まれるデータを受けて、多数のグラフィックデバイスに転送し、プロセッサが書き込みオペレーションを重複して遂行する必要を排除する。システムの初期化中、システムコンフィギュレーションユーティリティを使用して設定されシステムコンフィギュレーションメモリに記憶されたアパーチャーサイズ値に基づき、アドレス空間においてブリッジにブロードキャストアパーチャーを割り当てる。グラフィックドライバは、多数のグラフィックデバイスに関連するユニキャストアパーチャーパラメータを、ブリッジドライバを介してブリッジへ送信し、ブロードキャストアパーチャーを有効にする。 (もっと読む)
複数の焦点取得方法及び装置
画像品質は、CTスキャンについて、特に、螺旋状コーンビームCTスキャンについて重要な特徴である。放射線ビームの焦点の2つの異なる位置で取得される投影データを用い、第1幾何学的構成から第2幾何学的構成へのその投影データをリビニングすることにより、投影データの2つの復讐号が1つのリビニング投影データ集合に結合され、それにより、データ集合の径方向分解能が改善される。有利であることに、本発明の特徴にしたがって、更なるリビニングが第2幾何学的構成から第1幾何学的構成に戻るように実行されることが可能であり、それ故、高径方向分解能を有する最初の幾何学的構成における投影データを得る。  (もっと読む)
(もっと読む)
個人用電子機器の3次元情報取得及び表示システム
本発明に係る個人用電子機器の3次元(3D)情報取得/表示システムは、様々な機能を有する2つのデジタルカメラを備える。2つのデジタルカメラは、3次元情報を取得し、この3次元情報は、オートステレオスコープディスプレイに表示される。また、明瞭且つ容易な使用感を得るために、2つのデジタルカメラは、ユーザに対し、正しい角度で適切な画像を投写することの補助となる目追跡装置としても機能する。また、2つのデジタルカメラは、正しい深さでのオートフォーカスを補助する機能も有する。各個人用電子機器は、取得された3次元データを保存し、送信し、表示できる。 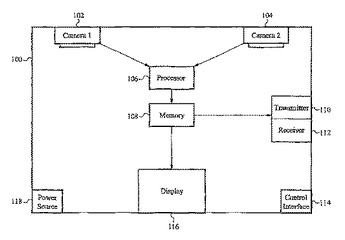 (もっと読む)
(もっと読む)
3Dデータ表示方法、装置、およびプログラム

【課題】 自分の体の動きを入力情報としてバーチャルな試着を行ない自分の体の動きに応じた試着結果を見ることができる3Dデータ表示方法を提供する。
【解決手段】 マーカ位置算出部4は可視光カットフィルタが入れられている。カメラ1から画像データを取り込み、位置マーカを検出、位置マーカ情報(マーカID、カメラ画面上での座標、大きさ、回転角など)を取得し、位置マーカ情報およびカメラ1の位置、角度より各位置マーカの絶対座標を求める。モーション処理部5は、各位置マーカの位置、傾きデータから各円柱の中心座標、中心軸の傾きのデータ(モーションデータ)を求める処理を一定時間ごとに繰り返し、モーションデータを蓄積する。表示部品加工部7は人体モデルの各部品に対する服飾データを服飾DB6から取り込み、部品の大きさに合わせて服飾データをスケーリングし、出力する。表示部8は服飾データを対象物に表示する。
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
複雑な動的3次元シーンをレイトレーシング法により写真現実的に表示する装置
本発明は、複雑な動的3次元シーンをレイトレーシング法により写真現実的に表示する装置に関する。該装置は少なくとも1つのプログラム可能レイトレーシングプロセッサを有しており、該プロセッサにおいては、
・専用のトラバース命令、及び/又は
・ベクトル算術命令、及び/又は
・レイトレーシング加速構造を形成するための命令、及び/又は
・レイトレーシング法を実行する際、光線の射出時に、既に光線が交差したオブジェクト又は三角形を前記光線が何度も交差するのを抑制するために用いられる少なくとも1つの判定ユニット(メールボックス)が実施され、
前記装置は、複数のスレッドを並列処理することができ、且つ、複数のスレッドを自動的に同期して処理することができるように構成されており、
前記装置は、nレベルのキャッシュ階層及び/又は仮想メモリ管理及び/又はメインメモリとの直接接続を使用することができる。 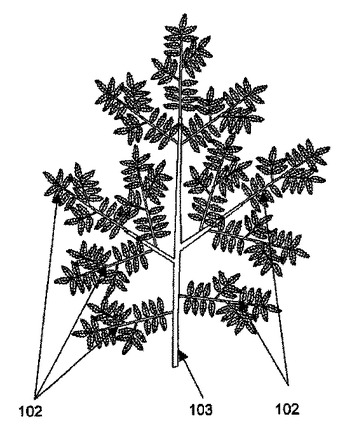 (もっと読む)
(もっと読む)
手術中の2次元画像および手術前の3次元画像をアフィン重ね合わせするための方法およびシステム
手術中のターゲットフィーチャの2次元(2D)医学画像を手術前のターゲットフィーチャの3次元(3D)医学画像と重ね合わせるためのシステムおよび方法が開示される。ターゲットフィーチャの3D画像は第1スケルトングラフに変換される。ターゲットフィーチャの2D画像は第2スケルトングラフに変換される。第1スケルトングラフと第2スケルトングラフのグラフマッチングがグラフの荒いアライメントを得るために実行され、第1スケルトングラフト第2スケルトングラフが重ね合わされる。 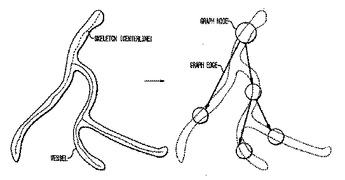 (もっと読む)
(もっと読む)
医用画像のフィルタリングシステムおよび方法
3次元医用画像フィルタは、定められた3D領域の特性に基づいて、画像の定められた位置で1つの値を計算する。フィルタは、隣接する位置の画像値および勾配の関数である方程式によって規定される。方程式は、定められた位置で最終値を決定する。これらの方程式の特定の定義は、フィルタ特性を決定するとともに、様々な用途において調整されてもよい。  (もっと読む)
(もっと読む)
遮蔽された部分の表面を対称性の算出により見込み復元するための技術
【解決手段】所与の物体の遮蔽面の見込み3Dマップを計算するシステムに関する。このシステムは、物体の視認可能面の初期3Dマップを取得し、初期3Dマップから1以上の対称性を特定する。システムは、初期3Dマップの点を特定された対称性にしたがって遮蔽空間に投影することにより、遮蔽面の見込み3Dマップを計算する。このシステムは初期3Dマップを取得するための画像装置を含む。現実の遮蔽面は隠されているが故に完全にはわからない。しかし、計算された3Dマップは実際の遮蔽空間に多くの点で近似する。なぜなら、ほとんどの物体は1以上の対称性をもっており、計算された3Dマップは物体の初期3Dマップにおいて特定されたそのような対称性に基づくからである。 (もっと読む)
マルチモードアルファ画像処理
2つの異なるモードに基づいて動作可能なアルファ画像符号化及び復号方式が開示される。符号化において、アルファ画像は、複数の画像単位(610)から構成される複数のアルファ画像ブロック(600)に分解される。ブロック(600)は、2つの圧縮モードのうちの一方に従って、ブロック表現(700)に圧縮される。ブロック表現(700)は、色コードワード(720)、輝度コードワード(730)、アルファコードワード(740)及びコードワード(730、740)のうちの一方を示す画像単位関連インデックスから成るシーケンス(750)を含む。ブロック(600)に対して使用する圧縮及び伸張のモードは、アルファコードワード(740)に基づいて判定される。高アルファ解像度モードにおいては、インデックスシーケンス(750)は、アルファコードワード(740)の量子化アルファ値(740A、740B)のうちの1つを選択するアルファインデックスと、輝度コードワード(730)により表される変更子セットから1つの輝度変更子を選択する輝度インデックスとを含む。高輝度解像度モードでは、インデックスシーケンス(750)は、輝度インデックスのみを含む。  (もっと読む)
(もっと読む)
3次元画像データにおけるナビゲーションのための方法
本発明は、3次元電子画像データセットにおけるナビゲーションのための方法であって、画像データセットが3次元部分画像データセットを含んでいる方法に関する。本方法は次の方法ステップを含む。すなわち、少なくとも1つの部分画像データセットの2次元の部分投影を含む画像データセットの少なくとも1つの2次元の投影を光学的に表示すること、少なくとも1つの2次元の部分投影を光学的に強調すること、特定の部分投影の選択に向けられた使用者入力を受け取ること、選択された部分画像データセットの2次元の投影を含む画像データセットの少なくとも1つの別の2次元の投影を使用者入力に依存して自動的に光学的に表示することである。本方法は、少なくとも2つの元の画像データセットの融合によって形成された画像データセットのために使用される。元の画像データセットは、特にコンピュータ断層撮影および陽電子放出断層撮影の画像データセットを含む。 (もっと読む)
管状構造を視覚化する方法及び装置
本発明は、オブジェクトの管状構造を、このオブジェクト3D画像データセットを使用することにより視覚化する方法及び対応する装置に関する。より効果的且つ実例的な視覚化を提供するために、前記管状構造の象徴的な経路ビュー(B)からCPRビュー(C)を生成及び視覚化するステップであり、前記象徴的な経路ビュー(B)は前記管状構造を示し、前記象徴的な経路の経路ポイントは3D空間位置データを割り当てられるステップ、及び前記CPRビュー(C)又は前記象徴的な経路ビュー(B)において選択された前記管状構造のビューイングポイント(V)を介して、前記オブジェクト(1)の少なくとも1つの平面ビュー(O)を生成及び視覚化するステップを有する方法が提案されている。 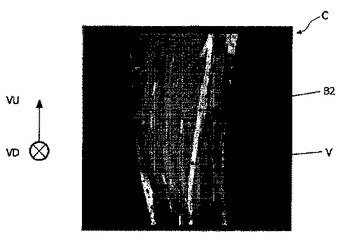 (もっと読む)
(もっと読む)
3D自動測量装置
360度全周囲カメラで得られる動画映像を解析して、画像内の任意の対象物について高精度な三次元計測を行う。所望の計測点と座標が既知の基準点を含む動画像を撮影する周囲画像撮影部101と、撮影画像を記録する画像記録部102と、画像内の映像的な特徴点を抽出する特徴点抽出部103と、画像内の計測点を自動抽出する計測点特定部104と、画像内の基準点を自動抽出する基準点特定部105と、計測点,基準点,特徴点を各フレーム画像内で対
応付ける対応点追跡部106と、対応付けられた計測点,基準点,特徴点の三次元相対座標を演算するベクトル演算部107と、上記演算を繰り返して三次元相対座標を統計処理する誤差最小化処理部108と、基準点の既知座標により三次元相対座標を絶対座標系に変換する絶対座標取得部109と、最終座標を記録する計測データ記録部110と、記録された計測データを表示する表示部111とを備える。
(もっと読む)
画像照合システム及び画像照合方法
物体の3次元データを入力する3次元データ入力手段(10)と、少なくとも1つの物体の参照画像を記憶する参照画像記憶部(30)と、物体の姿勢の候補である姿勢候補を生成する姿勢候補決定手段(20)と、姿勢候補に応じて3次元データを2次元の画像に射影しつつ参照画像に近い比較画像を生成する比較画像生成手段(40)と、参照画像と比較画像との距離値及び類似度のいずれか一方に基づいて照合を行う画像照合手段(55)とを備える。これにより、物体の参照画像が姿勢や照明等異なる条件で撮影されている場合にも、高精度に照合や検索ができる。また、物体の3次元物体モデルが予め得られなかったり、参照画像が1枚乃至少数しか存在しない場合にも、高精度に照合や検索ができる。  (もっと読む)
(もっと読む)
1,621 - 1,640 / 1,659
[ Back to top ]