
Fターム[5B057DA07]の内容
Fターム[5B057DA07]に分類される特許
401 - 420 / 3,964
3次元座標計測装置
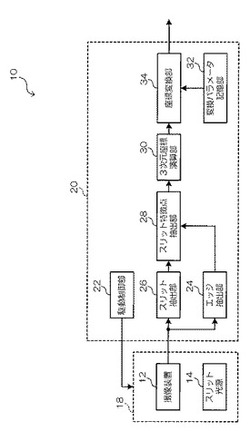
【課題】精度良くセンサ座標系を世界座標系に変換する。
【解決手段】基準プレート50を世界座標系でキャリブレーションされた3次元絶対座標計測器60で計測して、世界座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。また、3次元座標計測ロボット10の3次元センサ部8を指令値に応じた位置に移動させ、基準プレート50にスリット光を投射して撮像し、撮像した画像からセンサ座標系における基準プレート50の基準点の3次元座標、法線ベクトル、及びエッジベクトルを演算する。世界座標系及びセンサ座標系の各々における基準点の3次元座標、法線ベクトル、及びエッジベクトルを用いて、センサ座標系を世界座標系に変換する変換パラメータを、指令値毎に算出する。
(もっと読む)
非触覚ユーザインタフェース用場面プロファイル

【課題】非触覚検知に基づくコンピュータシステム用ユーザインタフェースを提供する。
【解決手段】非触覚インタフェースを実行するコンピュータに接続するディスプレイの近くに1人以上のユーザを有する場面の画像を獲得するステップと、前記画像を処理し、前記1人以上のユーザのプロファイルを生成するステップとを有する。コンテンツはその後、前記ディスプレイ上に上映するため前記プロファイルに対応して選択される。
(もっと読む)
誤差検出装置及び誤差検出プログラム
【課題】対象物の撮影画像の撮影方向及び撮影距離等に基づく二次元表示上の誤差の許容量を考慮して、対象物の当該対象物の設計情報に対する誤差を検出する誤差検出装置及び誤差検出プログラムを提供する。
【解決手段】誤差検出装置1は、対象物三次元情報113の表示画像と対象物の撮影画像情報111とを位置合わせする位置合わせ手段101と、撮影の視点となる座標と対象物三次元情報113の対象物を構成する面との距離及び撮影方向と面とのなす角度に基づいて算出される二次元表示上の誤差の許容量を、対象物三次元情報113の表示画像の座標に対応づけて誤差マップ114を生成する誤差マップ生成手段102と、対象物三次元情報113の表示画像及び撮影画像情報111から対象物の輪郭となるエッジ点を抽出するエッジ抽出手段103と、エッジ点と誤差マップ114とを比較してエッジ点が誤差を有するか否か判定する誤差点判定手段104とを有する。
(もっと読む)
画像生成装置、画像生成方法及びプログラム
【課題】物体検出に適した画像変換処理部を備える撮像装置を提供すること。
【解決手段】画像生成装置100は、水平方向よりも俯角だけ下向きに設置された撮像装置により撮像された第1の画像から、前記第1の画像が画像変換された第2の画像を生成する画像生成装置100であって、撮像装置を端点とする、鉛直方向のベクトルと撮像面との交点を通る、第1の画像における直線を特定する特定部105xと、特定された直線に沿って、第1の画像2の画素をサンプリングすることで、前記第2の画像を生成する画像展開処理部103とを備える。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測方法
【課題】画像と3次元形状モデルの誤対応を減らし、高速でロバストな物体の位置及び姿勢の計測を実現する。
【解決手段】物体の3次元形状モデルを保存する保存部110と、物体の濃淡画像を入力する濃淡画像入力部130と、物体の距離画像を入力する距離画像入力部150と、位置姿勢計測装置100に対する物体の概略の位置及び姿勢を入力する概略位置姿勢入力部120と、濃淡画像の情報を利用して、物体の概略の位置及び姿勢をもとに物体の第1の位置及び姿勢を算出するとともに、第1の位置及び姿勢を用いて算出される3次元形状モデルの画像面上での投影位置をもとに、距離画像から得られる3次元点群または当該3次元点群及び濃淡画像の画像特徴群と、3次元形状モデルとの対応付けを行い、当該対応付け結果に基づいて第2の位置及び姿勢を算出する位置姿勢算出部160を備える。
(もっと読む)
車両用外界認識装置およびそれを用いた車両システム
【課題】例えば雨天時の傘をさしている歩行者と持っていない歩行者のように、類似した2種類の物体を少ない処理負荷で検出することができる車両用外界認識装置を提供する。
【解決手段】車両用外界認識装置1000は、画像から第一の物体と第二の物体で互いに共通する部分の類似度MT0と、第一の物体の特有な部分の類似度である第一の特有類似度MT1と、第二の物体の特有な部分の類似度である第二の特有類似度MT2を算出して、共通類似度MT0と第一の特有類似度MT1を用いて第一の物体の有無を判定するとともに、共通類似度MT0と第二の特有類似度MT2を用いて第二の物体の有無を判定し、装置全体の処理負荷を軽減する。
(もっと読む)
画像処理方法、制御プログラムおよび画像処理装置
【課題】画像の内容の一部が互いに重複する第1の画像と第2の画像とをつなぎ合わせて一体の画像にする画像処理技術において、画像のつなぎ目を目立たなくすることのできる技術を提供する。
【解決手段】画像の内容の一部が互いに重複する第1の画像と第2の画像とをつなぎ合わせて一体の画像にする場合において、第1の画像I1のうち第2の画像I2と重複する重複領域Ic1の一部を所定の切断線Lc1で切除した第1の部分画像Ip1と、第2の画像I2のうち第1の画像I1と互いの重複領域を重ねたときに第1の部分画像Ip1と重複する部分を切除した第2の部分画像Ip2とを、互いの切断線を一致させてつなぎ合わせ、しかも切断線を非直線とする。
(もっと読む)
被写地物の位置特定方法とそのプログラム、及び表示地図、並びに撮影位置取得方法とそのプログラム、及び撮影位置取得装置
【課題】本願発明の課題は、測量技師など人が被災地に立ち入ることなく地物位置(例えば、被災位置)や地物形状(例えば、被災規模)を把握する方法とそのプログラムを提供するとともに、撮影した写真によって写真撮影位置を特定できる方法と装置とそのプログラムを提供することにある。
【解決手段】本願発明の被写地物の位置特定方法は、被写地物の形状から4点以上の特徴点を選出するとともに、これら特徴点に対して座標を付与し、地表モデルを投影したモデル形状から特徴点に相当する点を4点以上選出するとともに座標を付与し、被写地物の特徴点とモデル形状の特徴点に相当する点とを対応させることで、写真平面内の任意座標系とモデル形状を表す平面内の任意座標系とを関連づけ、数値標高モデルに基づいて、被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定する方法である。
(もっと読む)
ワーク位置の認識方法及び認識装置
【課題】 1台のカメラでワークの位置などを認識するにあたり、ワークの形状等に特徴部分がない場合でも、その位置などを認識することができ、また、複数のワークがカメラの視野に入る場合でも、対象とすべきワークを的確に認識できるようにする。
【解決手段】 予め所定の方向から視たワークモデルの基本形状を記憶しておき、この基本形状とカメラで画像情報として取得したワーク形状との相関性を算出するとともに、基本形状が得られる方向にカメラを移動させ、移動後に新たに取得した画像情報のワーク形状と基本形状の相関性を求め、この両者の相関性が所定の閾値に達するまでカメラの移動と画像取得を繰り返す。画像情報に複数のワークが認識される場合、移動後の相関性が移動前の相関性より低い場合、次に相関性が高いワークに切り換える。
(もっと読む)
画像処理装置,画像処理方法及び撮像装置
【課題】撮影された画像の被写体に基づいて合成用画像を合成し、配置シーンに適した画像を作成することができる画像処理装置,画像処理方法及び撮像装置を提供する。
【解決手段】撮影画像中の被写体を検出し、被写体の配置を演算によって判断し、被写体の配置に応じて画像に合成する合成用画像を選択し、選択された合成用画像の配置を、他の合成用画像及び被写体と重ならないように決定し、合成用画像を合成する。
(もっと読む)
個人識別データ登録方法
【課題】顔認証を行うと同時に個人識別データを登録することができ、顔認証における新たな利用価値を有した方法を提供する。
【解決手段】撮像手段により得られた人物の顔を示す画像データと、記憶手段に記憶された前記射影行列データとに基づいて、該人物の顔の特徴を示す成分値を算出し、算出された成分値との誤差が所定の閾値未満となる成分値を示す個人識別データが、記憶手段に記憶されているか否かを判断し、撮像手段により撮像されている人物が同一であると判断した場合に、算出された成分値との誤差が所定の閾値未満となる成分値を示す個人識別データが、記憶手段に記憶されていないと判断したとき、記憶手段に記憶された個人識別データの代わりに、新たに算出した成分値を示す成分値データを、新たな個人識別データとして記憶手段に上書きする。
(もっと読む)
合成画像形成方法及び画像形成装置
【課題】本発明は、合成画像を形成する場合に、重複領域のパターンの状態に応じて、適正に合成画像を形成することを目的とする合成画像形成方法、及び合成画像形成装置の提供を目的とする。
【解決手段】上記目的を達成するための一態様として、複数の画像を合成して合成画像を形成する合成画像形成方法、及び装置であって、複数の画像間の重複領域について、当該重複領域中に含まれるパターンの属性情報を作成し、当該パターンの属性情報に基づいて、合成対象となる画像を選択し、当該選択に基づいて画像合成を行う方法、及び装置を提案する。また、他の一態様として、重複領域内の属性情報を用いて、複数段階で画像合成を行う方法、及び装置を提案する。
(もっと読む)
映像信号処理装置及び映像信号処理方法
【課題】全周囲カメラのような特殊な光学系で撮像された歪みのある画像に対しても、高い超解像効果を得ることができる映像信号処理装置及び方法を提供すること。
【解決手段】歪補正変換式算出部123は、各切出し領域の非線形歪みを補正するための歪補正変換式を算出する。歪補正・補間処理部101は、各切出し領域に対して歪補正及び補間処理を行う。位置合せ変換式算出部104は、歪補正及び補間処理後の各切出し画像間での位置合せを行うための位置合せ変換式を算出する。画素座標変換部111は、補間処理が行われる前の、各フレーム画像に対して、切出し領域に対応する歪補正変換式及び位置合せ変換式を用いて、画素座標の再配置を行う。画像合成部112は、画素座標変換部111により得られた複数フレーム分の再配置された切出し画像を合成する。
(もっと読む)
部位認識装置、部位認識方法、及び部位認識プログラム
【課題】映像や画像に含まれる人物の部位等を高精度に認識する。
【解決手段】映像又は画像に含まれる人物の部位を認識する部位認識装置において、前記映像又は画像に含まれる少なくとも1人の人物の人体領域を検出する人体領域検出手段と、前記人体領域検出手段により得られる人体領域から所定の部位を認識する部位認識手段とを有し、前記部位認識手段は、前記人体領域検出手段により得られる人体領域の画像のうち、予め設定された形状と一致する領域を、前記形状に対応して設定された前記所定の部位として認識することにより、上記課題を解決する。
(もっと読む)
撮像装置、画像処理装置及び画像処理プログラム
【課題】画像データの被写体の色を被写体本来の色に容易に補正することができる撮像装置を提供する。
【解決手段】 被写体を撮像する撮像部8と、前記撮影部による撮影画角内に照明光を照射する照明部14と、前記照明部により照明光が照射されていない状態で撮像した第1画像データを記憶する第1記憶部10と、前記照明部により照明光が照射されている状態で撮像した第2画像データを記憶する第2記憶部10と、前記第1記憶部に記憶されている第1画像データの特徴量及び前記第2記憶部に記憶されている第2画像データの特徴量を取得する特徴量取得部4と、前記特徴量取得部により取得された前記第1画像データ及び前記第2画像データの特徴量に基づいて、前記第1画像データの特徴量を前記第2画像データの特徴量に近づける補正係数を生成する補正係数生成部4と、前記補正係数生成部により生成された補正係数に基づいて、前記第1画像データの補正を行う補正部4とを備える。
(もっと読む)
撮影装置
【課題】撮影時のレンズ及びズーム率に対応する歪曲収差係数を算出する事が可能な撮影装置を提供する。
【解決手段】撮影装置10は、撮影用のレンズを有し、当該レンズを用いた撮影が可能な撮影部20と、撮影部20がそれぞれ異なる撮影姿勢で撮影を行うことで得られる複数の画像情報から特徴点を抽出し、一の画像情報から抽出された特徴点と、他の画像情報から抽出された特徴点とから、被写体上の同一点を示す特徴点の組を探索し、特徴点の組に基づいて、他の画像情報が撮影されたときの撮影姿勢を推定し、推定された撮影姿勢に基づいて、レンズの歪曲収差係数を算出する歪曲収差係数算出部50と、を備える。
(もっと読む)
医用イメージング・システム間の同期
【課題】医用イメージング・システムによって与えられるデータ内容及び血管内センサによって与えられるデータ内容を同期させる。
【解決手段】侵襲型撮像において、第一のデータ系列を第二のデータ系列と同期させる同期方法であって、データは患者の関心領域を表わし、別々の医用システムにより取得されており、データはさらに、関心領域についての二つの異なる形式の情報に対応しており、当該方法は、患者の生理学的活動を表わす二つの信号に関してデータを互いに対して整列させるステップを含んでおり、信号は、データ取得に用いられたものと共通の時間尺度において医用システムによって記録されている。
(もっと読む)
立体画像再構成装置、立体画像再構成方法、及び立体画像再構成プログラム
【課題】対象の外郭を示す形状情報だけでなく内部構造に関する情報をも含む立体画像を再構成する。
【解決手段】対象の立体画像を再構成する立体画像再構成装置であって、濃淡で示された複数の透過型画像を撮像する撮像部と、透過型画像において複数の特徴領域を選択する特徴領域選択部と、複数の特徴領域のそれぞれの、透過型画像上の位置に基づいて、複数の特徴領域の空間的な分布を算出する特徴領域分布算出部と、複数の透過型画像を重ね合わせて対象の立体構造を示す立体画像を再構成する場合に、複数の特徴領域の空間的な分布に基づいて、複数の透過型画像により示される濃淡を、複数の特徴領域のそれぞれの位置に割り付けて、複数の特徴領域のそれぞれにおける立体構造を示す立体画像を再構成することにより、対象全体に濃淡を割り付けた立体画像を再構成する立体画像再構成部とを備える立体画像再構成装置を提供する。
(もっと読む)
画像処理装置、撮像装置およびプログラム
【課題】 位置ズレの検出精度に大きな影響を与えることなく、複数画像の位置合わせの演算負荷を抑制する技術を提供する。
【解決手段】 画像処理装置の縮小画像生成部は、第1画像および第2画像を同じ縮小率で縮小して縮小画像のペアを生成する。位置ズレ演算部は、複数の縮小画像のペアを用いて、縮小率の値の小さい順に縮小画像の位置合わせを繰り返した後に、第1画像および第2画像の位置ズレを求める。また、縮小画像生成部は、各々の縮小率が定数のべき乗の逆数で変化するように、縮小画像のペアを複数生成する。そして、位置ズレ演算部は、各画像で演算対象となる標本点の間隔を、縮小率が最小値となる縮小画像の標本点に対して定数の平方根の倍数で変化するように決定する。
(もっと読む)
不良記録素子の検出装置及び方法、画像形成装置
【課題】記録ヘッドの解像度より低い解像度の読取装置を使用した場合であっても、不良記録素子を精度良く特定する。
【解決手段】記録ピッチWPの記録素子のうち検出ピッチ数PP間隔の記録素子を動作させて記録したライン状のテストパターンがWSピッチで読み取られた読取画像信号について、端から順に0からn(nは自然数)まで読取画素番号を付し、読取画素番号を解析ピッチ数PSで除算して剰余を求め、読取画像信号を剰余毎の画像信号に分解し、剰余毎に予測される予測信号と剰余毎の画像信号とに基づいて剰余毎の変動信号を算出し、剰余毎の変動信号に基づいて複数の記録素子のうち不良記録素子を特定する際に、T=WP×PP÷|WS×PS−WP×PP|から求められる周期Tが予め設定された解析最小周期以上となるように解析ピッチ数PSの値を設定する。
(もっと読む)
401 - 420 / 3,964
[ Back to top ]