
Fターム[5B057DA07]の内容
Fターム[5B057DA07]に分類される特許
321 - 340 / 3,964
面形成支援システム、面形成支援装置、及び面形成支援プログラム
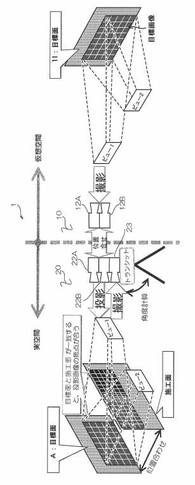
【課題】本発明は、施工作業に要する時間を短縮させることができる面形成支援システム、面形成支援装置、及び面形成支援プログラムを提供する。
【解決手段】仮想空間において、予め定められた目標面に表示された所定画像を予め設定した複数の撮影位置から予め設定した撮影方向に向けて仮想的に撮影することにより得られる撮影位置毎の画像情報を生成する情報生成装置と、実空間において、目標面に対する複数の撮影位置と同一の位置関係になるよう各々設置され、対応する画像情報により示される画像を、前記目標面を形成する際の基礎となる基礎面に、対応する撮影方向に向けて投影する複数の投影装置と、を備えた。
(もっと読む)
画像合成装置と画像合成方法およびプログラム

【課題】画像の合成を制御して高品質である広画角の合成画像を容易に生成できるようにする。
【解決手段】被写体領域決定部293は、撮像時に測距を行って生成された複数点の被写体距離情報に基づき、撮像画像における近接被写体の領域を決定する。合成処理部294は、決定された近接被写体の領域の位置に基づき、撮像画像から画像を切り出して繋ぎ合わせて合成画像を生成する。したがって、近接被写体の領域を分割しないように画像を切り出して繋ぎ合わせることで、繋ぎ目に上書きする画像の選択操作や選択した画像を繋ぎ目に上書きする処理を行う必要がなく、高品質である広画角の合成画像を容易に生成できる。
(もっと読む)
対象物追跡装置、対象物追跡方法、および制御プログラム
【課題】追跡対象の追随性と処理速度の高速化を両立できる対象物追跡装置を実現する。
【解決手段】この物体追跡装置は、第1フレームにおいて対象物の詳細輪郭モデルを生成する詳細輪郭モデル生成部30と、第2フレームにおいて複数の探索位置を設定する探索位置設定部31と、上記複数の探索位置の各々において上記詳細輪郭モデルからラフ輪郭モデルを生成するラフ輪郭モデル生成部32と、上記ラフ輪郭モデルの上記詳細輪郭モデルに対する尤度を判定する尤度判定部33と、上記尤度判定部33により判定された尤度に基づいて、上記複数の探索位置の中から探索位置を絞り込む探索位置絞込部34と、上記探索位置絞込部により絞り込まれた探索位置の中から、上記第2フレームにおける上記対象物の位置を特定する対象物位置特定部36とを備える。
(もっと読む)
情報処理システム、情報処理装置及びプログラム
【課題】撮像装置間の校正を行う画像処理システムの提供。
【解決手段】第1と第2の撮像装置と、複数の発光素子を備えた複数の被撮像物と、第1と第2の撮像装置により撮像される撮像画像を処理する画像処理装置と、第1と第2の撮像装置により撮像される撮像空間内のそれぞれ予め定められた位置に固定され、被撮像物と画像処理装置との通信を媒介する複数の通信媒介装置と、を含み、画像処理装置は、発光制御手段により被撮像物の指定した発光素子を発光させた状態で第1と第2の撮像装置によりそれぞれ撮像された第1と第2の撮像画像を取得する撮像画像取得手段と、第1の撮像画像に設定される第1の座標系における発光素子の位置と、第2の撮像画像に設定される第2の座標系における発光素子の位置とが対応するように、第1、第2の座標系の対応関係を規定する情報を更新する更新手段と、を含むことを特徴とする画像処理システム。
(もっと読む)
植生検出装置及び植生検出方法
【課題】座標変換などのシステムの統合を容易にし、またコストや物理的サイズも抑え、夜間など暗い環境にも対応する植生検出装置を提供する。
【解決手段】植物の葉で吸収されにくい波長の第1の3次元レーザレーダ21と、吸収されやすい波長の第2の3次元レーザレーダ22とから出力された計測値(距離、角度、反射率)を取得する第1及び第2の3次元点群取得部11及び12と、第1の3次元レーザレーダ21による第1の計測点と、その第1の計測点に最も近い第2の3次元レーザレーダ22による第2の計測点とを対応づける対応付け部16と、対応づけられた第1及び第2の計測点について、第1の計測点の反射率と第2の計測点の反射率との比を求める反射率比算出部15と、反射率の比に基づいて互いに対応づけられた計測点が植物か否かを判定する判定部17とを備えている。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置
【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
画像処理装置および画像処理システム並びに画像処理方法
【課題】複数回の画像形成を要する画像データの画像を媒体に形成できるようにする。
【解決手段】汎用色CMYKの色値で画像が表現された多層データを取得し(ステップS210)、多層データにおける汎用色CMYKの色値と3つの単層データのそれぞれにおける汎用のインク色cmykのインク量との対応関係を定めた3つの展開用LUTを用いて多層データを3つの単層データ(第1層〜第3層データ)に展開する(S220〜S250)。
(もっと読む)
画像処理装置、画像処理方法、および制御プログラム
【課題】種々の条件において撮影された顔画像における唇の色を特定し、特定した唇の色を用いて唇の領域を特定することができる画像処理装置および画像処理方法を実現する。
【解決手段】本発明に係る画像処理装置6は、人物の口を含む顔画像から唇の特徴を特定する画像処理装置であって、顔画像の肌の代表色を特定する肌代表色特定部17と、顔画像において、少なくともいずれかの領域が唇の一部を含むように複数の領域を設定し、各領域の代表色を候補色として特定する候補色特定部18と、肌の代表色と、各候補色との色相および彩度における差に応じて、複数の候補色から唇の代表色を特定する唇代表色特定部19とを備える。
(もっと読む)
車外監視装置
【課題】一部の距離データの検出誤差に起因する立体物距離の変動を好適に抑制することができる車外監視装置を提供する。
【解決手段】ステレオ画像認識装置4は、車両を示す距離データが分布する領域Aを路面から設定高さH以上の上側領域Auと、路面から設定高さ未満の下側領域Alとに分割するとともに、上側領域Auに属する距離データの平均値(平均距離Lu)と、下側領域Alに属する距離データの平均値(平均距離Ll)とをそれぞれ演算し、これら平均値のうち何れか小さい値を当該車両までの車間距離Lとして設定する。これにより、検出誤差が発生し易い領域の距離データを的確に除外することができ、一部の距離データの検出誤差に起因する車間距離の変動を好適に抑制することができる。
(もっと読む)
物体検出装置及び方法、並びにプログラム
【課題】 検出性能を低下させずに車両周辺の物体を高速で検出する。
【解決手段】 物体検出装置10は、車両周辺を撮影した映像を、その映像から画像特徴を抽出した特徴映像に変換する映像変換部20と、特徴映像を複数の領域に分割して合成する映像分割合成部30と、合成映像を走査して第一の物体検出処理を行う第一物体検出処理部40と、第一の物体検出処理の結果から物体候補位置を求める物体候補位置指定部50と、物体候補位置に対して第二の物体検出処理を行う第二物体検出処理部60を備える。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】動被写体領域も静止被写体領域の双方について効果的なノイズ低減を実行する装置および方法を提供する。
【解決手段】複数の連続撮影画像のブレンド処理を実行する重ね合わせ処理部は、画像の動被写体領域を検出し、画像領域単位の動被写体情報に基づいて、静止被写体領域において高いブレンド比率とし、動被写体領域において低いブレンド比率とした複数画像のブレンド処理を実行して重ね合わせ画像を生成し、さらに重ね合わせ画像に対して、動被写体情報に基づいて、動被写体領域においてより強いノイズリダクション処理を実行する。ノイズリダクション処理においては、例えば動被写体領域においてより高いノイズ低減効果を奏する前記動被写体情報に依存した係数を持つローパスフィルタを適用した画素値更新処理を実行する。これらの処理により動被写体領域、静止被写体領域の双方においてノイズリダクションのなされた画像を生成することが可能となる。
(もっと読む)
表示基板モジュール組立装置及びその方法
【課題】 アライメントマークに類似した形状が現れた場合にも、確実に、アライメントマークだけを選択可能な表示基板モジュール組立装置及びその方法を提供する。
【解決手段】 表示基板を搬送する搬送手段と、表示基板に付されたアライメントマークを撮像する撮像手段と、撮像手段の画像からアライメントマークをテンプレートマークとして保管し、かつ前記撮像手段の画像とテンプレートマークとの相関演算によりアライメントマークを認識する画像処理手段と、画像処理手段の出力情報に基づいて搬送手段を制御する制御手段と、画像処理手段の処理内容を表示する表示手段とを少なくとも備える表示基板モジュール組立装置は、更に、テンプレートマークとの相関値が予め設定された閾値より高いマーク候補が複数検出された場合に分別設定画面を表示手段に表示し、かつ、分別設定画面で設定された比較項目に基づいて、テンプレートマークと前記マーク候補とを比較する画像処理手段とを備える。
(もっと読む)
画像処理装置、画像処理方法、画像形成装置、プログラムおよび記録媒体
【課題】オブジェクトと周囲との差異が小さい場合でも、動的輪郭法のパラメータを画像の特徴に応じて設定することにより、高精度にオブジェクトの輪郭を抽出する。
【解決手段】特徴量算出部104は、輪郭設定部102により設定された輪郭内部の平均輝度と輝度の標準偏差を算出し、エネルギー関数計算部105は、エッジ成分の重み係数に、平均輝度と輝度の標準偏差を設定してエネルギー関数を計算する。
(もっと読む)
車両検知装置及びこれを用いる車両配光制御装置
【課題】より遠方から他車両を精度良く検知することが可能な車両検知装置及びこれを用いる車両配光制御装置の提供。
【解決手段】本発明は、自車前方の他車両を検知する車両検知装置であって、車両前方を撮影するカメラで得られる撮像画像を画像処理し、該撮像画像中における自車前方の他車両からの光を特定することで、自車前方の他車両を検知する第1検知手段と、第1検知手段とは異なる検知手段であって、少なくとも自車前方の他車両の位置に関する位置情報を取得する第2検知手段と、カメラ感度を制御する制御手段とを備え、制御手段は、第1検知手段により自車前方の他車両が検知されていない状況下で、自車前方の他車両に関する位置情報が第2検知手段により取得された場合に、該他車両が第1検知手段により検知されるように、自車と自車前方の他車両との間の位置関係に応じてカメラ感度を変更する。
(もっと読む)
電子装置
【課題】ユーザにとって使い勝手の良い電子装置を提供する。
【解決手段】対象者の足に関する情報を検出するセンサから前記対象者の足に関する情報を入力する入力部と、前記入力部からの前記対象者の足に関する情報に基づいて、前記対象者の足元に画像を表示する表示部と、を備える。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理プログラム
【課題】複数の画像を効率よく処理する画像処理装置、画像処理方法、及び画像処理プログラムを提供する。
【解決手段】複数の画像取得部は各々画像を取得し、車両情報取得部は車両の移動状態を示す車両情報を取得し、画像補正量算出部は複数の画像取得部のうち1つの画像取得部が取得した第1の画像と、他の画像取得部が取得した第2の画像との位置関係に基づき画像補正量を算出し、画像補正値算出部は、車両情報に基づいて推定した位置関係に基づき当該画像補正量を算出する。
(もっと読む)
画像処理装置、画像処理方法、及びコンピュータプログラム、並びに撮像装置
【課題】 複数の低解像度画像の中から、高画質の高解像度画像を生成するのに適した基準画像を選択できる画像処理装置を提供する。
【解決手段】 画像処理装置100は、複数の低解像度画像のうちの1つを基準画像候補として選択して、その他の低解像度画像を位置合わせするための変換行列を求める位置合わせ部102と、その他の低解像度画像を変換行列で座標変換して、基準画像候補及び座標変換された低解像度画像をマッピング画像にプロットして基準画像選択用再構成画像を生成する再構成処理部103と、マッピング画像にプロットされた、基準画像候補及びその他の低解像度画像の画素数が多いほど、また、マッピング画像上の同一の画素に重複してプロットされた画素数が少ないほど、基準画像候補に高い評価値を付与する評価値算出部104と、評価値の高い基準画像候補を基準画像として選択する基準画像選択部105とを備えている。
(もっと読む)
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法
【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
撮像装置
【課題】 装置本体の表面から撮像を行って取得した撮像画像データとその背面から撮像を行って取得した撮像画像データの一部分の画像データとを合成しても、不自然な印象を与えることのない合成画像データを取得すること。
【解決手段】 装置本体の正面に設けられ、第1の主要被写体を撮像して第1の撮像画像データを取得する第1の撮像部と、装置本体の背面に設けられ、第2の主要被写体を撮像して視差を有する少なくとも2つの視差画像データを含む第2の撮像画像データを取得する第2の撮像部と、第2の撮像部の撮像により取得された2つの視差画像データから第2の主要被写体の画像データを切り出す切出部と、第1の撮像画像データと切出部により切り出された第2の主要被写体の画像データとを予め設定された合成条件に従って合成して合成画像データを作成する画像処理制御部とを備える。
(もっと読む)
顔検出方法および顔検出装置、ならびに、プログラム
【課題】顔検出の検出結果に基づき対象人物が目を覆う用具を装着しているか否かを判定可能とする。
【解決手段】画像から顔を検出し、検出された顔から目の特徴点を抽出する。抽出された目の特徴点から目の縦幅および横幅を求め、目の縦幅および横幅と、目について予め求められた標準の縦幅および横幅との差分をそれぞれ算出する。算出された差分が0未満の場合には、差分を0と見做す。算出された目の縦幅および横幅それぞれの差分に基づき、検出された顔内の目が覆われた状態か否かを判定する。両目の縦幅および横幅の差分が全て閾値以上である場合に、目が覆われていると判定する。
(もっと読む)
321 - 340 / 3,964
[ Back to top ]