
Fターム[5B057DA07]の内容
Fターム[5B057DA07]に分類される特許
281 - 300 / 3,964
自位置特定システム、自位置特定プログラム及び自位置特定方法
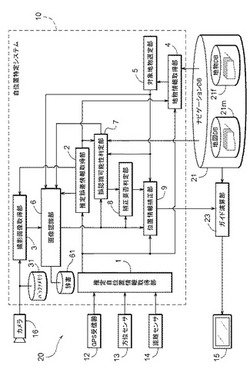
【課題】データベースに整備されていない地物に基づいて自位置が特定されることを抑制し、データベースに整備されている地物に基づいて適切に自位置を特定する。
【解決手段】推定自位置情報を取得する推定自位置情報取得部1と、撮影画像取得部3と、地物データベース21fから、画像認識の対象となる対象地物の対象地物情報を取得する地物情報取得部4と、対象地物の画像認識を行なう画像認識部6と、画像認識結果と対象地物情報とに基づいて推定自位置情報を補正する位置情報補正部9と誤認識可能性の有無を判定する誤認識可能性判定部7と、位置情報補正部9による補正の要否を判定する補正要否判定部8とを備え、補正要否判定部8は、誤認識可能性が有ると判定された場合に、位置情報補正部9による補正が不要と判定する。
(もっと読む)
ステレオカメラのキャリブレーション方法及び情報処理装置

【課題】ステレオカメラのキャリブレーション方法及び情報処理装置において、簡単、且つ、短時間の作業で安定した精度の補正パラメータを生成可能とすることを目的とする。
【解決手段】右及び左カメラのキャリブレーションを行う際、点灯状態の右及び左発光部を撮影可能な位置に配置された反射体に対し、点灯された右発光部を右カメラで撮影した画像の位置座標を点灯された左発光部を左カメラで撮影した画像の位置座標に平行移動させる補正パラメータを求め、点灯された右及び左発光部を右カメラで撮影した画像に基づいて右及び左発光部を結ぶ直線の回転角度を求め、右カメラの撮影画像を回転補正する補正パラメータを求め、点灯された右及び左発光部を左カメラで撮影した画像に基づいて右及び左発光部を結ぶ直線の回転角度を求め、左カメラの撮影画像を回転補正する補正パラメータを求めるように構成する。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム
【課題】製品の欠損等がある部分を検出する。
【解決手段】画像データ取得部は画像データ200を取得する。総和データ生成部は画像データ200を複数のブロック310に分割し、各ブロック310内の画素に対応付けられる画素値を合計した総和データを生成する。差分データ生成部は位置が縦方向に隣り合う2つのブロックの総和データの差分を表す第1種の差分データと、位置が横方向に隣り合う2つのブロックの総和データの差分を表す第2種の差分データを生成する。判定データ生成部は第1種の差分データと第2種の差分データのうちの一方を選択し、選択した差分データと、選択した差分データに対応するブロックの画像データ200内の位置とを対応付けた判定データを生成する。結果データ生成部は選択された差分データが表す差分が許容条件を満たすか否かを判別した結果データを生成する。出力部は結果データの画像データ200内の位置を出力する。
(もっと読む)
画像処理装置、撮像装置、画像処理方法、プログラム及び記録媒体
【課題】コストの増大を抑えながらも、動画の撮像中に高画質の静止画を撮像することができる技術を提供する。
【解決手段】画像信号に信号処理を施して出力する信号処理手段と、前記信号処理手段から出力される複数の画像信号を合成して解像度を向上させる超解像処理を施して、被写体の静止画を生成する画像信号を出力する超解像処理手段と、前記超解像処理手段から出力される画像信号のエッジを強調するエッジ強調手段と、を有し、前記信号処理は、前記超解像処理によって前記複数の画像信号を合成してもエッジ強調成分が目立たない程度のエッジ強調処理を含むことを特徴とする画像処理装置を提供する。
(もっと読む)
視差算出装置、距離算出装置及び視差算出方法
【課題】二つの視点それぞれから得られた画像間の視差を算出する際、画像間の歪み又はずれの影響を抑え、精度の高い視差を簡易に算出する視差算出装置、距離算出装置及び視差算出方法を提供する。
【解決手段】視差算出装置100は、第一カメラ1から得られた基準画像及び第二カメラ2から参照画像を取得する。画像分割部101は、条件設定部102によって設定される分割条件に従い、基準画像及び参照画像それぞれを複数の領域に分割する。補正量決定部103は、分割された領域毎に画像ずれ量を算出し、その画像ずれ量に基づき補正量を決定する。視差算出部104は、補正量決定部103によって決定された補正量に基づいて画像分割部101から得られる分割基準画像及び分割参照画像の各領域に対して画像の補正を行い、補正後の画像に基づいて視差を求める。
(もっと読む)
電子機器、顔画像抽出制御方法およびプログラム
【課題】映像コンテンツデータからの人物の顔画像の抽出を適切に制御する電子機器を提供する。
【解決手段】実施形態によれば、電子機器は、映像コンテンツから人物の顔画像を抽出するための電子機器であって、検出手段と、調整手段と、抽出手段と、を有する。検出手段は、前記映像コンテンツのフレームに顔画像が含まれる場合に、検出した顔画像を切り出すための切り出し範囲を決定する。調整手段は、前記切り出し範囲がフレーム外に及ぶ場合、前記切り出し範囲に含まれる第1顔画像を調整して第2顔画像を出力する。抽出手段は、前記第2顔画像と、前記第1顔画像が前記映像コンテンツ内で登場する時点に対応するタイムスタンプ情報とを出力する。
(もっと読む)
非接触式高分解能の手形取り込みのための装置及び方法
【課題】異なる複数の焦点距離の各々において対象の手の手形画像全体を取り込むための非接触式手形取り込みのためのシステム及び方法を提供する。
【解決手段】、画像取り込みデバイス(14)は、撮像カメラ(32)と、偏向状態に基づいた様々な光路長を伴う複数の光変調素子(42)及び偏向感受型光学素子(40)を有する電気光学配列(34)と、を含む。該デバイスに対して異なる焦点距離の各々において手形画像を取り込ませるように制御システム(38)を画像取り込みデバイス(14)に結合させており、ここで各手形画像は冗長な手形画像データが取り込まれるように隣接する焦点距離における手形画像の焦点深度と重複した焦点深度を有する。制御システム(38)は、各手形画像を位置データと位置合わせすると共に、異なる焦点距離で取り込んだ手形画像から合成手形画像を作成している。
(もっと読む)
停止線認識装置、停止線認識方法及びプログラム
【課題】道路ジョイント部を停止線として誤認識することを防止できると共に、停止線の認識率を向上させることが可能となる停止線認識装置を提供する。
【解決手段】自車両後方の路面の画像情報を取得する画像情報取得手段と、自車両のサスペンションの沈み込み量を検出する検出手段と、前記画像情報から画像認識により停止線及び道路ジョイント部を含む停止線候補を取得する画像認識手段と、を備え、前記画像認識手段は、前記検出手段によって検出されたサスペンションの沈み込み量に基づいて、前記停止線候補を停止線として認識することを優先する認識優先モードと前記道路ジョイント部を停止線として誤認識することを防止する誤認識防止モードとのいずれかを選択し、当該選択した認識優先モード又は誤認識防止モードによって前記停止線候補から停止線を認識する。
(もっと読む)
画像処理装置、撮像装置およびプログラム
【課題】撮影した位置とは異なる位置を視点とする画像を提供すること。
【解決手段】画像処理装置は、異なる位置で撮像された複数の画像の画像データを取得する画像データ取得部と、複数の画像の撮像位置の相対的な位置関係を取得する位置関係取得部と、複数の画像の撮像位置とは異なる位置に、視点位置を設定する視点位置設定部と、位置関係および視点位置に基づいて複数の画像からそれぞれ選択した複数の部分領域の画像データを用いて、視点位置を視点とする画像を生成する画像生成部とを備える。
(もっと読む)
対象物追跡装置および対象物追跡システム
【課題】撮像画像中の対象物の追跡をより確実に行うことを可能にする。
【解決手段】テンプレートマッチングが成功して先行車両の追跡が継続されるごとに、新規追跡画像を重ねて合成していくことで新たに合成画像を生成していくとともに、新たに合成画像を生成する場合には、過去合成画像に追跡の継続回数に応じた重みを付けながら、新規追跡画像を重ねてさらに合成していく画像重畳合成部25と、画像重畳合成部25で生成された合成画像に対してエッジ検出を行って、先行車両の端部の位置を決定する車両端決定部27と、車両端決定部27で決定した端部の位置をもとに、テンプレートを更新するテンプレート更新部28とを備え、テンプレートを更新した場合は、更新後のテンプレートとのテンプレートマッチングを繰り返すことで先行車両の追跡を行う。
(もっと読む)
仮想ラベル表示処理プログラム
【課題】ラベルを対象物に貼り付けた時の態様を、視野を変えた種々の状態で視覚的にシミュレーションする。
【解決手段】操作端末10の制御回路102は、仮想ラベル表示処理プログラムに基づき、カメラ111により撮影された、電子機器を含む所望の視野の実画像データを取得するステップと、取得された視野の実画像データにおける複数の特徴点を設定するステップと、タッチパネル112や操作ボタンからの決定操作信号に基づき、仮想ラベルの画像データと複数の特徴点との位置相関を決定するステップと、決定された位置相関を満たすようにしつつ、対象物画像の実画像データと仮想ラベルの画像データとを合成して合成画像データを生成するとともに、生成された合成画像データをタッチパネル112に出力するステップと、を実行する。
(もっと読む)
3次元的モデルを利用した身体臓器の映像生成方法及び装置並びにコンピュータ読み取り可能な記録媒体
【課題】リアルタイムで医療映像を入力してこれを3次元モデルと整合した映像と比較し、リアルタイム医療映像に3次元モデルが結合された映像を出力する3次元的モデルを利用した身体臓器の映像生成方法及び装置を提供する。
【解決手段】本発明による臓器映像の生成方法は、患者の少なくとも一つの臓器を表す医療映像に基づいて少なくとも一つの臓器の3次元モデルを生成し、患者の身体活動による少なくとも一つの臓器の形態的変化を表す複数の映像と臓器の3次元モデルとを整合させることで複数の整合映像を生成し、患者の現在身体状態に基づいて複数の整合映像のうちのいずれか一つを選択して出力する。
(もっと読む)
ステレオ画像較正方法、ステレオ画像較正装置及びステレオ画像較正用コンピュータプログラム
【課題】各カメラによる画像に写っている像全体の位置をステレオ画像として適切となるように修正するための較正パラメータを算出するステレオ画像較正方法を提供する。
【解決手段】ステレオ画像較正方法は、第1及び第2のカメラから被写体を含む領域を撮影した第1及び第2の画像を取得し、第1及び第2の画像からそれぞれ被写体領域を検出し、各画像の被写体領域から被写体上の同一の点に対応する被写体特徴点の組を抽出し、被写体特徴点の組に基づいて、像面に対して平行な第1の軸及び第2の軸のそれぞれの周りの第1のカメラの回転角と第2のカメラの回転角の差による各画像上の被写体の位置のずれを補正する第1の較正パラメータを求め、第1の画像及び第2の画像の背景領域に写っている物体の像から各カメラの光軸周りの回転角の差による第1の画像と第2の画像間の回転を補正する第2の較正パラメータを求めることを含む。
(もっと読む)
画像監視装置
【課題】侵入検知の性能を維持しながら所定物品の設置を許容することにより、正規利用者の利便性を向上可能な画像監視装置を提供する。
【解決手段】変化領域抽出部231は、撮像部21により監視空間が順次撮像された監視画像と記憶部22に記憶された背景画像221とを比較して変化領域を抽出し、物体領域検出部232は変化領域の外形を所定図形にて近似して物体領域を検出する。物体領域追跡部233は前後する時刻に検出された物体領域のうち特徴が互いに類似する物体領域を対応付け、対応付けた物体領域ごと検出位置から移動距離を算出する。遮蔽異常判定部235は物体領域の移動距離を予め設定された静止判定値と比較するとともに当該物体領域に占める変化領域の割合を算出して予め設定された遮蔽容認値と比較し、移動距離が静止判定値未満且つ割合が遮蔽容認値以上であるときに侵入者の検知を妨げる遮蔽物があると判定する。
(もっと読む)
検査装置、プログラム及び画像の位置合わせ方法
【課題】画像化の際に誤差が空間的に分散しやすい要素と、誤差があってもそれが局所にとどまる要素とが被検査対象領域内に混在する場合にも、位置合わせ精度を高くできる技術を提供する。
【解決手段】検査装置1は対象画像及び基準画像を複数のブロック領域に分割する。この対象画像及び基準画像のブロック領域がずらされつつ画素毎に比較されて、類似度マップMBが作成される。類似度が高くなるずらせ位置P(Δx,Δy)を表す各マップ点URが包含されることで最小矩形領域Sminが類似度マップMBにおいて設定される。最小矩形領域SminのX方向及びY方向の幅として特定される分布指標値Dx,Dyが閾値Dx0,Dy0と比較され、当該最小矩形領域Sminを有する対象ブロック領域が有効ブロックであるか否かが判定される。位置合わせのための確定ずらせ位置の算出には有効ブロックのみが使用される。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】時間的なロバスト性が従来よりも高い色補正用情報を生成することが可能な、新規かつ改良された画像処理装置等を提供する。
【解決手段】画像処理装置は、被写体が描かれた第1の画像を構成する各画素のうち、第1の特徴点及び第1の特徴点以外の画素が有する第1の色情報と、被写体が描かれた第2の画像を構成する各画素のうち、第2の特徴点及び第2の特徴点以外の画素が有する第2の色情報との対応関係を示すカラーペア情報を算出するカラーペア算出部と、カラーペア算出部が算出したカラーペア情報に基づいて、第2の色情報を第1の色情報に変換するためのモデル式を算出するモデル式算出部と、モデル式算出部が算出したモデル式にIIRフィルタを掛けるフィルタ部と、を備える。
(もっと読む)
画像処理装置、X線CT装置、及び画像処理方法
【課題】X線CT装置において、血管内腔の評価に適した画像を提供すること。
【解決手段】X線CT装置1は、造影領域と、造影領域の周辺に存在する石灰化領域とを検出する血管・石灰化領域検出部52と、造影データの造影領域に対応する、単純データにおける推定造影領域を推定する血管領域推定部53と、単純データを基に、推定造影領域の周辺に存在する石灰化領域を検出する石灰化領域検出部54と、造影データのCT値プロファイルを基に造影データの石灰化領域に含まれるコア領域を演算すると共に、単純データのCT値プロファイルを基に単純データの石灰化領域に含まれるコア領域を演算する石灰化コア領域演算部55と、造影データと単純データとのコア領域を基に造影データと単純データとを位置合わせして、単純データに、造影データの石灰化領域を合成して合成データを生成する合成処理部58と、合成データを表示する表示装置46と、を有する。
(もっと読む)
地物選定システム、地物選定プログラム及び地物選定方法
【課題】画像認識を実施する時点における日照の状況も効果的に反映して、予め存在が把握されている複数の地物の中から画像認識の対象とする対象地物を選定する。
【解決手段】所定範囲内に存在する複数の候補地物についての地物情報である候補地物情報を取得し、日陰と日向とのコントラストを示すコントラスト情報を取得し、候補地物情報と日時情報とに基づいて、候補地物のそれぞれについて、候補地物と日陰との関係を示す情報である地物日陰情報を演算し、地物日陰情報とコントラスト情報とを含む日照要因情報に基づいて、候補地物の中から対象地物を選定する。
(もっと読む)
画像処理装置、画像処理プログラムおよび画像処理方法
【課題】位置合わせを正確に行うことができる画像処理装置を提供する。
【解決手段】画像間の位置合わせを行う画像処理装置であって、位置合わせ基準となる基準画像を決定する基準画像選択部2と、基準画像と、基準画像の画素値又は輝度値に基づいて鏡面ハイライト領域を検出すると共に、基準画像と位置合わせを行う参照画像の画素値又は輝度値に基づいて鏡面ハイライト領域を検出する鏡面ハイライト領域検出部3と、鏡面ハイライト領域の位置情報に基づいて少なくとも鏡面ハイライト領域に重みを設定する重み設定部4と、重みを用いて、基準画像と参照画像とのマッチングを行って位置ずれ量を算出する位置ずれ量算出部5とを備え、重み設定部4は、鏡面ハイライト領域、あるいは鏡面ハイライト領域および鏡面ハイライト領域の周辺領域の重みを、鏡面ハイライト領域、あるいは鏡面ハイライト領域および周辺領域以外の領域の重みよりも小さく設定する。
(もっと読む)
281 - 300 / 3,964
[ Back to top ]