
Fターム[5B057DA07]の内容
Fターム[5B057DA07]に分類される特許
261 - 280 / 3,964
画像記録装置及び撮像装置
【課題】ユーザ所望の方向に被写体が目線を向けた画像を取得することができる画像記録装置及び撮像装置を提供する。
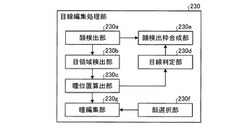
【解決手段】画像記録装置は、被写体の電子的な画像データに対応する画像を表示する表示部と、画像から顔を検出する顔検出部230aと、顔検出部230aによって検出された顔の範囲から、目の領域及び瞳の領域を検出する目領域検出部230bと、目の領域において瞳の領域の位置を変更することを含む編集を行う瞳編集部230gと、瞳編集部230gによって編集された画像データを記録する記録部とを備える。
(もっと読む)
物体認識方法及び認識装置

【課題】魚眼画像に対し、射影変換や補正演算による画像の変換を行わず、魚眼画像の歪んだ画像をそのまま用いて物体の認識を行うことができるようにする。
【解決手段】物体の認識を行う対象魚眼画像110の歪みの方向にあわせて領域を分割し120、物体認識部130がそれぞれの領域毎に用意したデータベース140を用いて物体認識を行う。また、対象魚眼画像100に回転処理を施した複数の対象魚眼画像に対しても同様の処理を行い、検出座標変換部150が得られた物体位置を逆回転により元の位置に戻し、得られた結果を検出結果として出力する。これにより、物体認識の検出精度の向上、データベースのデータ量の削減が可能となる。また、魚眼画像に対する物体認識のためのデータベース作成には、データベース作成に必要となる物体画像を回転させたものを利用する。
(もっと読む)
木構造抽出装置および方法ならびにプログラム
【課題】それぞれ1つの起始部から分岐を繰り返しながら離れる方向に広がって延びる第1および第2の線状構造物を含む医用画像データから、第1および第2の構造物に対応する木構造を精度よく構築する。
【解決手段】第1および第2の線状構造物のそれぞれ1つの起始部から分岐を繰り返しながら離れる方向に広がって延びるという特徴に基づいて、各ノードごとに、各ノードに接続可能な複数のエッジについて接続しやすさを表すコストを重み付けするコスト関数により、第1の木構造の根ノードに対応する第1の根ノードと第2の木構造の根ノードに対応する第2の根ノードのそれぞれから各ノードを接続する。
(もっと読む)
奥行調整が可能な立体映像表示装置
【課題】 背景領域に過度に奥行範囲を割り当てることなく、手前側の奥行感が強調され、自然な奥行感を再現できる立体映像表示装置を提供する。
【解決手段】1実施形態の立体映像表示装置は、入力画像から奥行値を生成する奥行情報生成部11と、前記奥行値を調整し、調整された奥行値を生成する奥行調整部12と、前記入力画像及び前記調整された奥行値から、右視点用画像及び左視点用画像を生成する画像生成部と、前記右及び左視点用画像に基づいて、立体映像を表示する画像表示部14と、を備え、前記奥行調整部12は、各奥行値の頻度に対して、奥行値に応じた重み付けを行うことによって奥行値の重み付きヒストグラムを求め、該ヒストグラムから得られる重み付き累積ヒストグラムを用いて奥行値を調整することを特徴とする。
(もっと読む)
無人搬送車の誘導ライン撮像装置、および無人搬送車
【課題】白とびのない画像データを生成することができる誘導ライン撮像装置、および該装置を備えた無人搬送車を提供する。
【解決手段】本発明に係る誘導ライン撮像装置は、路面に敷設された誘導ラインに沿って走行する無人搬送車に備えられた誘導ライン撮像装置であって、誘導ラインを含む領域を撮像面で光学的に撮像して該領域の画像データを生成する撮像手段と、撮像する領域を照射面から照射した光によって照らす1つ以上の照明手段と、撮像面上に設けられた第1偏光フィルタ6と、照射面上に設けられた第2偏光フィルタ7とを備え、第1偏光フィルタ6を透過し得る光L5の振動方向および第2偏光フィルタ7を透過し得る光L2(L3)の振動方向が異なることを特徴とする。
(もっと読む)
液晶アレイ検査装置およびライン座標位置算出方法
【課題】表示パターンのフレームサンプリングから得られた撮像画像(シグナルイメージ)の収縮、膨張等のフレーム間の幅に不均等な部分が生じた場合であっても、各ラインの座標位置を正確に算出し、液晶パネルのピクセル位置を正確に算出する。
【解決手段】表示パターンを撮像して得られる撮像画像(シグナルイメージ)において、実検出ラインの座標位置を検出した後、次に座標位置を検出する実検出ラインを求める際に、前の実検出ラインの信号強度パターンと比較することによってラインの良・不良の検出、および、不良ラインの収縮又は膨張の判定を行い、次の実検出ラインを求める。ラインの良・不良を検出し、不良ラインの収縮・膨張の判定することによって、ライン幅にばらつきが生じた場合であっても、各ラインの座標位置を正確に算出する。
(もっと読む)
情報処理装置、その処理方法、プログラム及び撮像装置
【課題】
個人差の影響を受けずに、視線の向き(θ1、θ2)を高精度に検出できるようにした技術を提供する。
【解決手段】
情報処理装置は、画像から人物の顔を検出する顔検出手段と、各人物に対応して顔に関する情報と視線補正データとを保持する辞書データを予め記憶する記憶手段と、前記辞書データ内の前記顔に関する情報を用いて、前記顔検出手段により検出された顔を認証する顔認証手段と、前記顔検出手段により検出された顔から視線に関する情報を検出する視線検出手段と、前記顔認証手段により認証された顔に対応した前記辞書データ内の視線補正データを用いて、前記視線検出手段により検出された前記視線に関する情報を補正する視線補正手段とを具備する。
(もっと読む)
検知装置、及び検知方法
【課題】夜間においても、走行路区分線の検知、及びヘッドライト検知を適切に行うことができる検知装置、及び検知方法を提供することを目的としている。
【解決手段】撮像装置10の露光時間を予め定められているタイミングで切り替える制御部22と、異なる露光時間で撮像された画像データを取得する画像取得部24と、前記画像取得部が取得した異なる露光時間の各画像データから各々対象物を検知する対象物検知部(25、26)と、を備える。
(もっと読む)
画像処理装置および方法、記録媒体並びにプログラム
【課題】正確に3次元座標を検出できるようにする。
【解決手段】取得部が、魚眼レンズを介して撮影した画像である魚眼画像を取得し、変換部が、魚眼画像を変換して、変換画像を生成し、認識部が、変換画像から認識対象の画像を認識する。本発明は画像処理装置に適用することができる。
(もっと読む)
画像処理プログラム、画像処理方法、画像処理装置、撮像装置
【課題】複数枚の画像間に生じた揺らぎに対してロバストな超解像処理を実現する。
【解決手段】本発明の画像処理プログラムは、位置ずれを含む複数枚の画像から、それら画像の各々よりも解像度の高い合成画像を生成する画像処理方法であって、前記複数枚の画像の各々を周波数分解し、複数階層の空間周波数成分を画像毎に生成する分解ステップ(S43)と、前記分解ステップにより画像毎に生成された複数階層の空間周波数成分を、階層毎に画像間で平均化し、階層毎の平均空間周波数成分を生成する平均化ステップ(S48)と、前記平均化ステップにより生成された前記階層毎の平均空間周波数成分を合成し、合成画像を生成する合成ステップ(S411)とを含む。
(もっと読む)
画像処理装置およびその方法
【課題】 分割撮影した画像を結合する場合に、結合画像の全体における照明むらを低減し、画像の間の重複領域における不自然なつなぎ目を抑制する。
【解決手段】 入力部302は、同一照明下において、被写体を分割撮影した複数の画像データ、および、補正用チャートを撮影した補正用の画像データを入力する。むら補正部303は、補正用の画像データから、複数の画像データの輝度むらを補正するための補正係数を算出し、補正係数により複数の画像データの輝度むらを補正する。制御部306は、分割撮影に用いた撮影装置が複数の画像データそれぞれを撮影した際の撮影方向を示す情報を取得する。画像射影部305は、撮影方向を示す情報に基づき、輝度むらを補正した複数の画像データを結合して、被写体の全体の画像を表す画像データを生成する。
(もっと読む)
情報処理プログラム、情報処理装置、情報処理システム、および、情報処理方法
【課題】簡単な操作で種々の画像を表示することが可能な情報処理技術を提供する。
【解決手段】ゲーム装置は、実空間に配置されたマーカを撮像する。ゲーム装置は、撮像した画像に含まれるマーカに基づいて、ゲーム装置を基準としたマーカの位置および姿勢を算出するとともに、マーカ上にマーカ座標系を設定する。また、ゲーム装置は、ゲーム装置が備える加速度センサが検出した加速度に基づいて、重力方向を検出する。次に、ゲーム装置は、検出した重力方向に基づいて、マーカ座標系の重力方向を算出し、算出したマーカ座標系の重力方向に基づいて、仮想キャラクタの姿勢を決定する。そして、ゲーム装置は、当該仮想キャラクタを表示装置に表示する。
(もっと読む)
カメラポーズ推定装置、カメラポーズ推定方法及びカメラポーズ推定プログラム
【課題】移動物体が含まれる場合においても正確にカメラポーズを算出する。
【解決手段】実空間中の点の3次元座標と、3次元座標が有するテクスチャ情報と、3次元座標が移動物体上か否かを示す移動物体フラグとを3次元点IDに関連付けた3次元リスト情報を記憶する手段と、移動物体フラグが0である3次元点の対応付けを行う3次元点対応付け手段と、最適カメラポーズ情報を出力するカメラポーズ算出手段と、最適カメラポーズ情報を用いてアウトライヤ対応点リスト情報内の3次元座標がフレーム画像に射影される再射影点を決定し、該再射影点とアウトライヤ対応点リスト情報内の対応点座標から算出する動きベクトルを用いて対象の3次元座標が移動物体上か否か判定し、移動物体と判定された場合は、処理対象のアウトライヤ対応点リスト情報内の3次元点IDに対応する移動物体フラグを1に更新して、最終的な最適カメラポーズを出力する。
(もっと読む)
ステレオ画像処理装置、ステレオ画像処理方法、及び、ステレオ画像処理プログラム
【課題】広角レンズを使用した場合でも、当該周辺部でも鮮鋭感がある優れた画像が得られるだけではなく、測距精度も高い技術を提供すること。
【解決手段】ステレオ画像処理装置は、撮影レンズ101、102および撮像素子103、104を備える2組の映像信号出力部と、信号処理回路105と、周辺解像補正回路106と、測距回路107を備えている。映像信号出力部からの映像信号は、信号処理回路105に出力される。信号処理回路105は、この映像信号に信号処理を行い周辺解像補正回路106に出力する。周辺解像補正回路106は、複数ある映像信号出力部のそれぞれに対応付けられて設けられており、映像信号出力部からの出力信号である映像信号に補正を加えて鮮鋭化する。測距回路107は、上述の映像信号補正部のそれぞれにより補正が加えられた複数の映像信号に基づいて、撮像内の各画素と被写体と距離を演算して測距値を求める。
(もっと読む)
画像処理装置、画像処理方法、プログラム
【課題】パノラマ合成の品質を落とさずに、処理過程で保存する画像データ量を削減し、必要なメモリ容量を低減できるようにする。
【解決手段】パノラマ画像生成に用いる一連のn個のフレーム画像データの入力過程で、つなぎ目(シーム)を順次確定させていく。このときに、(m+1)個(但しm<n)のフレーム画像データ群毎に、隣接フレーム画像データ間のつなぎ目となるm個の各つなぎ目の位置を、各フレームの被写体情報を用いた最適位置判定処理によって求め、m個以下のつなぎ目を確定させる。この確定したつなぎ目に基づいてフレーム画像データを合成する。
(もっと読む)
情報処理プログラム、情報処理方法、情報処理装置および情報処理システム
【課題】マーカを精度良く認識する点について改善された情報処理プログラム等の提供。
【解決手段】情報処理装置のコンピュータを、画像を逐次取得する画像取得手段、取得された画像から特定対象を検出する特定対象検出手段、検出された特定対象の中央領域から得られた画素値に基づいて、当該中央領域に関連する第1領域情報を検出する第1領域情報検出手段、その検出結果が所定の条件を満たすか否かを判定する第1判定手段、特定対象のうち中央領域の周辺に存在する周辺領域から得られた画素値に基づいて、当該周辺領域に関連する第2領域情報を検出する第2領域情報検出手段、および少なくとも、第1判定手段による判定結果が肯定である場合に第2領域情報検出手段により検出された第2領域情報を出力する出力手段として機能させるための情報処理プログラム。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
画像処理装置
【課題】操作者の負担を軽減することができる画像処理装置を提供する。
【解決手段】被検体P内の撮像によりカプセル内視鏡10で生成された画像データを処理する画像処理部50をフレーム毎に表示する表示エリア71を有する表示部70を備え、画像処理部50は、mフレームの画像データの内、nフレーム目の画像データに含まれる閾値以下の画素値を有する領域を検出する。次いで、検出した穴領域が基準位置と重なる位置へnフレーム目の画像データを移動して表示エリア71に表示する位置を調整する。更に穴領域の面積を求め、求めた穴面積が基準面積と同じ面積になるようにnフレーム目の画像データを拡大又は縮小して表示エリア71に表示するサイズを調整する。
(もっと読む)
置き去り又は持ち去り検知システム
【課題】置き去り又は持ち去り検知システムにおいて、置き去り又は持ち去り者の検索のための対象画像を短い映像として提供する。
【解決手段】監視領域の画像を撮影する監視カメラ20と、撮影した画像を保存するレコーダー32と、置き去り又は持ち去り判断部103と、レコーダー32に保存された画像から出力画像を切りだす出力画像作成部106と、出力画像を表示するモニター30とを有し、前記判断部103が置き去り又は持ち去りがあったと判断したとき、切り出し範囲作成部105は、前記異物の位置を含む所定の範囲内の位置と、前記置き去り又は持ち去り発生時刻を含む所定の期間に基づき切り出し範囲を作成し、前記出力画像作成部106は作成した範囲に基づき前記レコーダー32に保存された画像から画像を切り出す。
(もっと読む)
拡張現実感提供装置及び仮想物体の重畳方法
【課題】マーカーを用いることなく、違和感のない拡張現実感を提供することが可能な拡張現実感提供装置を提供する。
【解決手段】地面推定部5は、撮像部1,2で撮像して得られる2つの撮像画像データの各々から顔を検出し、検出した顔の目と口を結ぶ三角形の三次元座標を算出する。地面推定部5は、2つの撮像画像データの一方から前記検出した顔を含む被写体の輪郭を抽出し、この輪郭を前記三角形の三次元座標を用いて三次元空間に逆投影する。地面推定部5は、三次元空間における前記輪郭のデジタルカメラ100の鉛直線の伸びる方向の端部を含みかつ当該方向に垂直な面を地面と推定する。地面推定部5は、表示部11に表示される立体映像において、前記推定した地面上に仮想物体を重畳表示させる。
(もっと読む)
261 - 280 / 3,964
[ Back to top ]