
Fターム[5B057DA07]の内容
Fターム[5B057DA07]に分類される特許
181 - 200 / 3,964
撮像装置、撮像装置の制御方法、三次元計測装置、およびプログラム
【課題】サンプリングピッチを細かくすることなく、少ないサンプリング数でより高精度に交点を算出する。
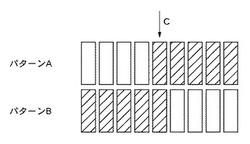
【解決手段】明部および暗部を有する第1のパターンまたは第2のパターンを投影パターンとして対象物へ投影する投影部と、投影パターンが投影された対象物を撮像素子に輝度分布として結像させる撮像部と、を備え、輝度分布は明部に対応する第1の輝度値と暗部に対応する第2の輝度値とを有し、第1のパターンおよび第2のパターンは明部の位置または暗部の位置が重複する重複部を有し、第1のパターンに対応する第1の輝度分布および第2のパターンに対応する第2の輝度分布は重複部で同輝度値となる交点を有し、交点の輝度値は第1の輝度値および第2の輝度値の平均値と所定値だけ異なる。
(もっと読む)
撮像装置、撮像制御方法、及びプログラム

【課題】容易に所望する被写体の表情を撮影可能な撮像装置、撮像制御方法、及びプログラムを提供する。
【解決手段】撮像装置は、撮像部10と、制御部20と、記憶部30と、音声出力部50とを備える。制御部20は、撮像部10により出力された画像データに基づいて、被写体の顔の特徴量を取得する。そして、取得した特徴量と基準特徴量との差分に基づいて、表情評価値を取得する。表情評価値が基準評価値よりも大きいと判別した場合、画像データを記憶部30に記憶させる。表情評価値が基準評価値よりも大きくないと判別した場合、被写体に対しさらに前表情評価値が大きくなる表情を作るように促す旨の音声メッセージを音声出力部50から出力させる。
(もっと読む)
駐車枠の認識装置、駐車枠の認識方法、及び、プログラム
【課題】駐車場に描かれた駐車枠12の形状を車両へ送信する駐車場側の通信設備を不要とし、駐車枠の認識が可能な駐車場を増やして有効に駐車枠を認識する。
【解決手段】駐車枠の認識装置2が、複数の駐車枠の形状のいずれかをユーザの操作に基づいて選択する。そして、選択した駐車枠の形状に基づいて、車両外部を示す画像中の駐車枠12を認識する。駐車枠の認識装置2が駐車枠12を認識すると、駐車支援システム100は駐車枠12で区画される駐車領域PAへ車両1を誘導し、駐車支援を行う。したがって、駐車場に描かれた駐車枠12の形状を車両へ送信する駐車場側の通信設備を不要とすることができる。かかる通信設備を不要とすることにより、駐車枠の認識が可能な駐車場を増やし、有効に駐車枠を認識することができる。
(もっと読む)
画像処理装置およびプログラム
【課題】1つの表が複数頁に分割されて印刷された場合でも、印刷された複数頁の原稿を読み込んで元の表を電子文書として復元することを可能とする。
【解決手段】表領域抽出部42は、スキャナ16により読み取られた複数頁からなる画像データの各頁から、表領域の画像をそれぞれ抽出する。表構造データ生成部43は、抽出された各表領域の画像からその表の表構造データをそれぞれ生成する。表接続性判定部45は、表構造データ生成部43により生成された各頁の表の表構造データに基づいて、各表どうしの接続可能性を判定する。表データ復元部44は、表接続性判定部45により判定された各表どうしの接続可能性に基づいて、各表を接続して元の表を復元するための接続順序を決定し、決定した接続順序に基づいて各表どうしを接続して分割前の1つの表データを復元する。
(もっと読む)
画像生成装置、画像生成方法及びプログラム
【課題】元画像の輪郭を適正に表現したモザイク画像を生成する。
【解決手段】画像生成装置100であって、モザイク画像の元となる一の元画像を取得する第1取得部61と、この第1取得部により取得された元画像を複数の画像領域に分割する画像分割部62と、複数の素材画像を取得する第2取得部63と、複数の画像領域及び複数の素材画像の各画素の色情報及び画素値の変化の度合に基づいて、複数の画像領域の各々について、複数の素材画像の中から各画像領域に類似する類似素材画像をそれぞれ特定する画像特定部64と、この画像特定部により特定された類似素材画像の各々をそれぞれが対応する画像領域の一の画像における各位置に組み合わせて合成し、元画像のモザイク画像を生成する画像生成部65と、を備えている。
(もっと読む)
関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラム
【課題】ノイズの影響等を軽減させて、ステレオペアの相関関数を精度良く算出することができる関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラムを提供する。
【解決手段】関数算出装置110は、参照視点画像及び複数の近傍視点画像を受信する正規化部111と、参照視点画像及び近傍視点画像をステレオペア毎に平行化する正規化部111と、平行化したステレオペアの視差を正規化する正規化部111と、視差を正規化したステレオペアの参照視点画像及び近傍視点画像に、マッチングウィンドウを定めるウィンドウ設定部112と、マッチングウィンドウ間の1次元POC関数を、視差を正規化したステレオペア毎に算出する関数算出部113と、1次元POC関数のうち、相関ピークの高さが閾値以上である1次元POC関数を統合する関数統合部114と、を備える。
(もっと読む)
被写体追跡装置及びその制御方法
【課題】 基準画像と入力画像との相関度に基づく被写体追跡を行う被写体追跡装置において、被写体の見えが変化する状況における被写体追跡の精度を向上させる。
【解決手段】 入力画像中の領域のうち、登録された第1および第2の基準画像の各々と最大相関度を有する領域を求める。そして第1の基準画像についての最大相関度と第2の基準画像についての最大相関度とを比較して、特定の被写体の領域を最大相関度を有する領域の中から判定する。そして、特定の被写体の領域を判定すると、判定した特定の被写体の領域に基づいて第2の基準画像を更新する一方、第1の基準画像は、更新しない。
(もっと読む)
位置検出装置、位置検出方法及びコンピュータプログラム
【課題】検出対象の位置を精度良く検出する位置検出装置を提供する。
【解決手段】所定の位置で所定の向きに設置された撮像装置によって撮像された第一の画像から、検出対象に含まれる第一特徴点eye_2l及び第二特徴点eye_2rの平面座標の位置を検出し、第一特徴点及び第二特徴点の空間座標の位置を取得し、第一特徴点と第二特徴点との間の平面座標における距離と空間座標における距離との比を算出し、撮像装置によって撮像された第二の画像から、検出対象に含まれる第一特徴点及び第二特徴点の平面座標の位置を検出し、距離比と、第二の画像における第一特徴点及び第二特徴点の平面座標と、に基づいて第一特徴点及び第二特徴点の空間座標の位置を検出する。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】コントラストが低い画像および自己相関が高い画像が対象であっても、高速かつ高精度の対応点の探索が実現され得る技術を提供する。
【解決手段】画像取得部によって第1画像および第2画像が取得され、第1設定部によって第1画像に基準点が設定され、第2設定部によって第2画像に探索基準点が設定される。次に、検出部によって、第1画像において基準点を基準として設けられる基準領域と、第2画像において探索基準点を基準として設けられる参照領域とに係る相関演算の結果に基づき、第2画像において基準点に対応する対応点が検出される。そして、判定部によって、第2画像における探索基準点と対応点との位置関係に基づいて、対応点の信頼度が判定される。
(もっと読む)
情報処理装置、情報処理方法、及びプログラム
【課題】例えば医療分野の診断等において、複数の部分画像が合成されて得られる被写体画像を有効に利用することが可能な情報処理装置、情報処理方法、及びプログラムを提供すること。
【解決手段】上記目的を達成するため、本技術の一形態に係る情報処理装置は、取得部と、算出部と、生成部と、合成部とを具備する。前記取得部は、被写体に対して複数の撮影領域が互いに重なるように撮影されることで得られた複数の部分画像を取得する。前記算出部は、前記取得された複数の部分画像のそれぞれについて前記被写体の画像を生成するために使用される領域を判定し、それらを複数の画像領域として算出する。前記生成部は、前記算出された複数の画像領域を互いに連結して前記被写体画像を生成する。前記合成部は、前記生成された被写体画像における前記複数の画像領域の連結位置を表す画像を前記被写体画像に合成する。
(もっと読む)
画像処理装置および画像表示システム
【課題】標本の高さ方向が異なる画像において、高さ方向に垂直な平面間の撮像領域のずれを補正して、高精度の全焦点画像および3次元画像を構築することができる画像処理装置および画像表示システムを提供すること。
【解決手段】固定された軸に沿って移動しながら撮像された一群の画像をもとに全焦点画像および/または3次元画像の構築処理を行う画像処理部33であって、一群の画像において、各画像における軸に垂直な平面内のずれの検出を行なう検出部331と、検出部331の検出結果に応じてずれの補正を行う補正部332と、固定された軸に沿って移動して撮像された画像および/または補正部332で補正された画像を含む一群の画像をもとに、全焦点画像および/または3次元画像を構築する画像構築部333と、を備えた。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
画像差分検出装置及び画像差分検出プログラム
【課題】差分画像を検出する画像間に位置ずれが発生しても意図した差分画像を検出できる画像差分検出装置及び画像差分検出プログラムを提供することを課題とする。
【解決手段】撮影手段により撮影された画像間の差分を検出する画像差分検出装置10であって、異なるタイミングで撮影された第1及び第2の画像の何れか一方をシフトしながら第1及び第2の画像間の差分画像を検出する画像差分演算手段32と、第1及び第2の画像間の差分画像のうち、第1及び第2の画像間の差が最も少ない差分画像を出力する画像差分評価手段33と、第1及び第2の画像間の差が最も少ない差分画像と第1又は第2の画像とを合成した合成画像を出力する画像合成手段34とを有することにより上記課題を解決する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】重なり領域を有する2つの入力画像を張り合わせた画像において、重なり領域と重なりのない領域との間を滑らかにつなぐこと。
【解決手段】画像処理装置は、第一入力画像を基準画像として用い、第二入力画像に対して第一位置合わせを実行し、第二入力画像における基準画像の中の重なり領域に位置する各第一画素とマッチングをとる第二画素を探すための第一位置合わせ装置と、第一画素と第二画素の位置に基づいて出力画像における第一画素に対応する出力画素の位置を計算し、その中の第一画素と第二画素の位置に対してそれぞれ重み付けを行い、第一画素は、基準画像の重なりのない領域からの最短距離が小さければ小さいほど、第一画素の位置に対する重みは大きくなるような関係を成すための出力画素位置決定装置と、第一画素と第二画素の少なくとも一方の画素値に基づいて出力画素の画素値を計算するための出力画素値決定装置とを備える。
(もっと読む)
撮像システムおよびその制御方法
【課題】別々に撮像された複数の部分画像を合成することにより広画角な全体画像を取得する撮像システムにおいて、つなぎ目部分が不自然でない高品質な全体画像を簡易な処理で生成可能とする。
【解決手段】撮像システムが、被写体の撮像範囲を複数の小区画に分割して撮像する撮像手段と、前記撮像手段で撮像された各小区画の部分画像を合成して全体画像を生成する画像処理手段と、前記撮像手段で被写体を撮像する前に、その被写体上の複数の点を計測し計測データを取得する計測手段と、前記計測手段で取得された各計測点の計測データに基づいて、計測データの値の空間的な変化がより小さい位置に小区画の境界が配置されるように、当該被写体の分割位置を調整する分割位置調整手段と、を備える。前記撮像手段は、前記分割位置調整手段により調整された分割位置に従って各小区画の撮像を行う。
(もっと読む)
対象物把持装置、対象物把持装置の制御方法、およびプログラム
【課題】対象物の姿勢を推定して把持を行う処理を高速化すると共に、把持動作の失敗確率を低減する。
【解決手段】対象物の姿勢を姿勢推定パラメータに基づいて推定する推定部と、推定部により推定された対象物の姿勢に基づいて対象物を把持する把持部と、把持部による把持の失敗を検知する検知部と、検知部により把持の失敗が検知された際の対象物の姿勢に基づいて姿勢推定パラメータを修正する修正部と、を備える。
(もっと読む)
画像処理装置、撮像装置、制御方法、及びプログラム
【課題】複数の画像データを加重加算する領域で発生する位置ズレを低減することを可能とした画像処理装置、撮像装置、制御方法、及びプログラムを提供する。
【解決手段】撮像装置の画像処理部103の位置ズレ検出部106は、入力画像データ間の位置ズレ量を検出する。合成比率設定部107は、入力画像データを合成する際の合成比率を設定する。位置ズレ補正部108は、位置ズレ検出部106により検出された位置ズレ量と合成比率設定部107により設定された合成比率から座標変換係数を算出し、入力画像データに座標変換係数を用いて座標変換を施すことで、入力画像データ間の位置ズレを補正する。更に、入力画像データを加重加算する領域を優先させて位置ズレの補正を行う。画像合成部109は、位置ズレが補正された入力画像データを合成比率で合成する。
(もっと読む)
ロボット制御システム、ロボットシステム及びマーカー処理方法
【課題】 ロボットの操作対象物に設定された第1のマーカーに基づいて、操作対象物の位置情報を特定できるロボット制御システム等の提供。
【解決手段】 ロボット制御システム10は、撮像部20から得られる画像情報に基づいて画像処理を行う処理部110と、処理部110の処理結果に基づいてロボット30の制御を行う制御部120と、を含む。処理部110は、ロボット30の操作対象物に設定された第1のマーカーに設定された画像構成要素が、N回対称性を有する場合に、画像情報に基づいて、第1のマーカーの認識処理を行い、操作対象物のN個の候補位置情報を求め、操作対象物の認識処理の結果に基づいて、N個の候補位置情報の中から操作対象物の位置情報を特定する。制御部120は、操作対象物の位置情報に応じてロボット30を制御する。
(もっと読む)
医用画像処理装置、及び医用画像処理プログラム
【課題】狭窄の診断に供する情報を生成することが可能な医用画像処理装置を提供する。
【解決手段】抽出部3は、複数のボリュームデータのそれぞれから、心臓の形態を表す第1データを抽出し、さらに、造影剤が流入した冠動脈の形態を表す第2データを抽出する。抽出部3は、第2データを利用して複数のボリュームデータのそれぞれから、冠動脈の形態を表す第3データを抽出する。解析部4は、複数の第3データのそれぞれにおける冠動脈の画素値に基づいて、冠動脈の各領域における血流速度を求める。カラーマッピング部5は、血流速度の大きさに応じた色を、冠動脈の各領域に割り当てることで色ボリュームデータを生成する。合成部6はボリュームデータと色ボリュームデータとを合成し、表示画像生成部7は合成したボリュームデータに基づいて表示用の画像データを生成する。
(もっと読む)
画像処理装置、画像処理方法
【課題】 高解像度の画像に対してリアルタイムでの物体認識を可能とする技術を提供すること。
【解決手段】 全方位の撮像が可能な撮像装置が撮像した画像を高解像度画像として取得すると共に、該高解像度画像から解像度を低下させた画像を低解像度画像として取得する。低解像度画像から、予め定められた被写体が写っている領域を被写体領域として検出する。高解像度画像において、被写体領域に対応する領域を特定し、該特定した領域に対して、該領域内の被写体を認識する処理を行う。認識結果を出力する。
(もっと読む)
181 - 200 / 3,964
[ Back to top ]