
Fターム[5B057DA07]の内容
Fターム[5B057DA07]に分類される特許
241 - 260 / 3,964
画像処理装置、画像処理方法、コンピュータプログラム
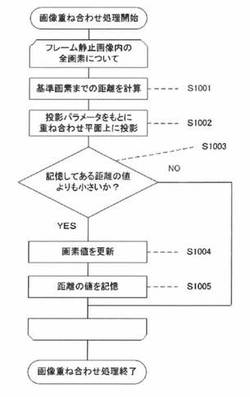
【課題】 動画像から切り出した複数のフレーム静止画像を重ね合わせて一枚の静止画像を構成する際、フレームの中央は明るいが端に行くにつれ暗くなるといった画像内の明るさムラの影響で、構成後の静止画像の画質が低下してしまうこと。
【解決手段】 各フレーム静止画像内の注目画素から基準画素までの距離を計算し、それに応じて重ね合わせに用いるフレーム静止画像を、重ね合わせ平面上の画素ごとに切り替えて構成を行う。これによって、明るさムラの影響を受けにくいように各フレーム静止画像を重ね合わせることができ、構成後の静止画像の画質の低下を抑えることが可能になる。
(もっと読む)
画像処理装置及びX線診断装置

【課題】カテーテル手技時における関心領域の設定の自動化。
【解決手段】画像演算・記憶部10は、被検体の血管が造影されていない第1透視画像データと、被検体に投与された造影剤により血管が造影された第2透視画像データとを記憶する。画像演算・記憶部10は、第1透視画像データを画像処理して第1透視画像に含まれるカテーテル領域を特定する。画像演算・記憶部10は、第2透視画像データを画像処理して第2透視画像に含まれる血管領域を抽出する。画像演算・記憶部10は、カテーテル領域の端点の位置に基づいて血管領域に関心領域を設定する。
(もっと読む)
画像処理システム、装置及び方法
【課題】立体画像とともに表示されるカーソルの位置を観察者に把握させることができる画像処理システム、装置及び方法を提供すること。
【解決手段】実施形態に係る画像処理システムは、立体表示装置と、レンダリング処理部と、表示制御部とを備える。立体表示装置は、複数の視差画像を用いて立体視可能な立体画像を表示する。レンダリング処理部は、3次元の医用画像データであるボリュームデータに対して、該ボリュームデータと相対的な位置が異なる複数の視点位置からレンダリング処理を行うことにより複数の視差画像を生成する。表示制御部は、前記レンダリング処理部によって生成された複数の視差画像とともに、前記立体表示装置にて立体画像が表示される3次元の立体画像空間において所定の入力部によって操作可能なカーソルの奥行き方向の位置を表す所定の図形の画像である図形画像を前記立体表示装置に表示させる。
(もっと読む)
画像処理装置及び方法
【課題】 任意の角度から見た自身の姿を確認することができるようにする。
【解決手段】 表示画像生成部は、被写体の注目部分の変化量に連動させて、異なる視点で被写体が撮影された画像又はそれと等価な画像を、被写体画像として生成する。画像表示制御部は、表示画像生成部により生成された被写体画像を表示画面に表示させる。本技術は、被写体の画像を表示する画像処理装置に適用することができる。
(もっと読む)
画像処理装置および電子部品実装機
【課題】画像から簡単にはんだ部を抽出可能な画像処理装置および電子部品実装機を提供する。
【解決手段】画像処理装置6は、基板の撮像エリアに照明光を照射する照明部61と、照明光が照射された撮像エリアを撮像する撮像部60と、撮像により取得された画像を処理する画像処理部62と、を備える。照明部61は、撮像エリアに対して直交する方向から照明光を照射し、撮像エリアは、基板に塗布されたはんだが露光するはんだ部と、はんだが露光しない非はんだ部と、を有し、画像処理部62は、はんだ部と非はんだ部との照明光に対する反射率の違いを利用して、画像からはんだ部を抽出する。
(もっと読む)
環境認識装置および環境認識方法
【課題】曲線を描いたり、それ自体が傾斜したりする対象物の特定効率および特定精度の向上を図る。
【解決手段】環境認識装置130は、検出領域内を分割した複数のブロック毎の輝度を取得し、ブロック毎の輝度のエッジが伸長する方向に基づくエッジ方向を導出し、エッジ方向に基づいてブロック同士を関連付け、エッジ軌跡を生成し、複数のエッジ軌跡により囲まれる領域をグループ化して対象物とし、対象物を特定物として決定する。
(もっと読む)
画像処理装置及びその制御方法
【課題】 監視対象オブジェクトの個数に上限値を設けながらも、オブジェクト数の個数が上限値以上になった場合であっても、監視対象オブジェクトを含まない特定領域が発生することを抑制する。
【解決手段】 撮像して得られた画像内を解析し、許容最大数Nmax以下の個数であって、予め設定された最小検知サイズ以上のサイズを持つオブジェクトを検出する(S102)。そして、認識されたオブジェクトの数が、許容最大数Nmax以上になった場合には前記最小検知サイズをより大きなサイズに変更する(S105)。また、認識されたオブジェクトの数が、目標最小数Nmin以下になった場合には最小検知サイズをより小さな値に変更する(S107)。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】少ない演算量で手ぶれを補正すること。
【解決手段】画像処理装置は、補正部と、生成部と、除去部と、合成部とを備える。補正部は、第1の露光時間で第1の画像を撮影するとともに、第1の露光時間よりも短い第2の露光時間で第2の画像を撮影する撮影部から、第1の画像と第2の画像とを取得するとともに、取得した第1の画像と第2の画像との位置ずれを補正する。生成部は、補正部により補正された第1の画像と、該補正部により補正された第2の画像との差分画像を生成する。除去部は、生成部により生成された差分画像からノイズを除去する。合成部は、除去部によりノイズが除去された差分画像を、第1の画像と合成する。
(もっと読む)
位置検知システム、それを用いた移動体、位置検知方法およびそのためのプログラム
【課題】センサの計測範囲に特徴的な被写体が存在していない場合や、そのセンサが他のセンサの計測範囲外にあるときにも、その位置姿勢の算出を可能にする。
【解決手段】第1のセンサは、環境内の存在物の位置情報および色情報を第1の検知情報として得るものであり、第2のセンサは、存在物の色情報を第2の検知情報として得るものであり、情報処理装置は、第2のセンサの位置姿勢を仮に設定する位置姿勢仮設定部と、位置姿勢仮設定部により仮に設定された第2のセンサの位置姿勢から存在物を検知したときに得られる検知情報を、仮想検知情報として、第1の検知情報を用いて仮想的に作成する仮想検知情報作成部と、仮想検知情報作成部で作成された仮想検知情報と第2のセンサで得られた第2の検知情報を比較する比較部と、比較部の比較結果と仮に設定された第2のセンサの位置姿勢から、第2のセンサの位置姿勢推定値を出力する位置姿勢推定部を備える。
(もっと読む)
入力画像における歪を検出する方法、入力画像における歪を検出する装置およびコンピューター読み取り可能な媒体
【課題】書物などのスキャン画像は背に近い所に歪みを有する。歪みを検出し、補正する方法を提供する。
【解決手段】特徴画像を用いてスキャンされた本の画像を分割化しページ領域に対応するピクセルをマップしページオブジェクトを作成してページの縁を検出する。ページオブジェクトの2つの間にある無地の背景領域を見つけ、ページ縁を分析してその形状を検出し、形状を分析して本の背の終端点を検出することにより本の背領域が検出される。ページ縁を用いて特徴画像を調べ、ピクセル値の上から下および下から上の下降勾配を検出し元のスキャンされた画像における影歪みの角を判定する。締め付けおよび湾曲歪みも検出される。ベジェ曲線を用いてページ上で検出された3つの歪みの各々をモデル化する。検出された歪みはまず台形の補正領域を定義することにより補正される。強度、締め付け、および湾曲補正が次に台形の補正領域内の線に沿って適用される。
(もっと読む)
環境認識装置および環境認識方法
【課題】夜間や雨等、光源が拡散し易い環境において、壁でないものを壁と誤判断することを抑制する。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の、自車両に対する相対距離を含む位置情報を取得する位置情報取得部160と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が第1所定距離内に連なる複数の対象部位をグループ化して対象物とするグループ化部162と、対象物を構成する複数の対象部位が、自車両の進行方向に垂直な面に対して所定角度以上に傾斜する傾斜面を形成すると、壁の候補である壁候補と判断する候補判断部164と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が、第1所定距離より長い第2所定距離内に連なる複数の壁候補を、壁であると判断する壁判断部166と、を備える。
(もっと読む)
画像処理装置および画像処理方法
【課題】高詳細な画像を得るために被写体をフラッシュ撮影すると、実際の環境光下では観察されるであろう被写体の陰影が消失して立体感が損なわれる場合がある。
【解決手段】S1でのユーザ指示に基づき、S2で被写体をフラッシュ撮影した第1の画像データと、蛍光灯などの観察光源下で撮影した第2の画像データを取得する。そしてS3で第1および第2の画像データの照明ムラを補正した後、S4で第1および第2の画像データにおける平均明度の比を用いて、画素ごとの明度補正パラメータを算出する。そしてS5で、該明度補正パラメータを用いて第1の画像データにおける画素ごとの明度を補正する。これにより、観察光源下で被写体に生じる陰影が再現された、高詳細な撮影画像が得られる。
(もっと読む)
入力装置
【課題】操作者とノイズとなる背景とを正確に識別して、カメラの撮影範囲内に操作者以外の人が居て手を動かした場合でも誤動作しない入力装置を提供する。
【解決手段】右眼用撮像装置Aと右眼用撮像装置Bと並べて配置し、距離測定手段Cにて両眼視差法によりそれぞれの撮像装置A、Bが撮像した被写体までの距離を測定する。そして、被写体判別手段Dは、測定した距離を両方の撮像装置A、B間の間隔に基づいて両眼視差法により割り出して予め設定してある奥行き距離と比較し、被写体までの距離と奥行き距離とが所定の許容範囲内で一致していると、操作指示生成手段Eはこの被写体の動きを検出し、この検出結果に応じた操作指示を生成する。
(もっと読む)
2次元コード、画像読取装置、画像読取方法、プログラム及び記憶媒体
【課題】2次元コードが歪んでいるような場合に、簡単に情報を読み取ることができるようにする。
【解決手段】白色及び黒色から構成される複数のセルを備えた2次元コードには、前記2次元コードが撮像されて歪んだ形状の2次元コード画像が生成された場合に、前記歪んだ形状の2次元コード画像から情報を読み取る位置を特定するための制御点または線が付与されている。2次元コードが歪んだ状態で撮像された場合は、2次元コード画像内の制御点等を起点としてFDD方法やDDM法に代表される形状変形手法を用いて歪みを補正し、2次元コード画像から情報を読み取ることができるようにする。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の規則性に基づいて対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、対象部位の輝度から、対象部位に対応する特定物を仮決定し(S302)、水平距離の差分および高さの差分が第1所定範囲内にある、同一の特定物に対応すると仮決定された対象部位をグループ化して対象物とし(S304)、任意の対象物から、水平距離の差分、高さの差分、および、相対距離の差分が第2所定範囲内にある、同一の特定物に対応すると仮決定された対象物を順次検出し、対象物群を特定し(S306)、対象物群における対象物の数に応じて対象物群が特定物であるか否かを決定する(S308)。
(もっと読む)
ロボット制御システム、ロボットシステム及びプログラム
【課題】 マスク画像を設定した画像を用いてビジュアルサーボを行うことができるロボット制御システム、ロボットシステム及びプログラムの提供。
【解決手段】 ロボット制御システム10は、参照画像と撮像画像とに基づきビジュアルサーボを行う処理部110と、制御信号に基づきロボット30を制御するロボット制御部120と、参照画像とマスク画像とを記憶する記憶部130とを含む。記憶部130は、ワーク40又はロボット30のハンド330の領域にマスク画像が設定されたマスク有り参照画像を、参照画像として記憶する。処理部110は、ワーク40又はロボット30のハンド330の領域にマスク画像を設定したマスク有り撮像画像を、撮像画像に基づいて生成し、マスク有り参照画像とマスク有り撮像画像とに基づきビジュアルサーボを行い、制御信号を生成し、制御信号をロボット制御部120に出力する。
(もっと読む)
検品システムでの位置合わせ処理のためのシステム及び方法
【課題】検品対象となる印刷画像から特徴点を抽出できない場合、リファレンス画像と印刷画像の位置合わせを行うことができないため、検品することもできない。
【解決手段】特徴点が抽出できない検品対象の印刷画像に、視覚感度の低い画像パターンを印字することで位置合わせの処理を行う検品システム。
(もっと読む)
通行監視システム
【課題】複数の監視カメラを用いることなく監視カメラの死角を解消することにより、立入制限エリアへの非許可者の不正侵入を確実に監視し得る通行監視システムを得る。
【解決手段】通行監視システムは、所定の出入口の近傍領域を第1方向から撮影するカメラ1と、カメラ1の画角内において、第1方向とは異なる第2方向から出入口の近傍領域が映るように配置された鏡11と、カメラ1によって撮影された映像内の鏡11に映し出された第1映像と、カメラ1によって第1方向から出入口の近傍領域を撮影した第2映像とに基づいて、出入口を通行する人物が一か複数かを判定する処理部4とを備え、処理部4は、第1映像に基づき第1のアルゴリズムを用いて人物の単複判定を行い、第2映像に基づき第1のアルゴリズムとは異なる第2のアルゴリズムを用いて人物の単複判定を行う。
(もっと読む)
基準マークモデルテンプレート作成方法
【課題】回路基材の基準マークのモデルテンプレートを誤りなく作成し得る方法を得る。
【解決手段】回路基材の基準マーク形成予定位置周辺を撮像装置により撮像し、それにより得られた画像の中から基準マークの像である可能性の高い像である基準マーク候補を抽出する基準マーク候補抽出工程(S2,S8〜S11)と、抽出された基準マーク候補が複数種類予定されている基準マークのいずれであるかを判別するマーク種判別工程(S3)と、そのマーク種判別工程の実施により種類が判明した基準マークのモデルテンプレートを作成するテンプレート作成工程(S5,S7)との実行により、モデルテンプレートの作成を行う。基準マーク候補抽出工程を、ハールライク特徴を用いた階層型アダブースト検出器を利用して基準マーク候補を抽出する工程とし、マーク種判別工程をニューラルネットワークを利用してマーク種を判別する工程とする。
(もっと読む)
画像処理装置及びその制御方法、並びにプログラム
【課題】エッジ強調処理が有効に作用し、さらにノイズを低減させたHDR画像を生成可能な画像処理装置及びその制御方法、並びにプログラムを提供する。
【解決手段】撮像装置1は、異なる露出により撮像されることで得られた複数の画像の各々を格納する画像メモリ104〜106と、複数の画像ごとにエッジを抽出するエッジ抽出回路103と、抽出されたエッジを示すエッジ画像を複数の画像ごとに格納するエッジ信号メモリ107〜109と、複数の画像及び複数のエッジ画像の位置合わせを実行する位置合わせ回路110と、位置合わせされた複数の画像の各々に対するゲインを調整し、位置合わせされたエッジ画像の各々に対し、露出が高い画像ほどゲインが大きくなるように調整するGain調整回路111と、調整された複数の画像、及び複数のエッジ画像を1つの画像に合成する画像合成回路118とを備えたことを特徴とする。
(もっと読む)
241 - 260 / 3,964
[ Back to top ]