
Fターム[5B057DA07]の内容
Fターム[5B057DA07]に分類される特許
221 - 240 / 3,964
眼科情報処理システム、眼科情報処理方法及びプログラム
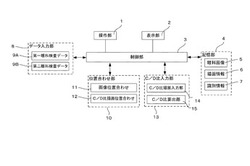
【課題】経過観察時のC/D比描画の効率化を図る。
【解決手段】眼科情報処理システムは眼科画像5、C/D比の描画情報6などを記憶する記憶部4、データ入力部8の選択画像を示す第一眼科検査データ9Aとその過去データである第二眼科検査データ9Bより、2つの眼科画像を位置合わせ部10により位置合わせを行う。表示部に第一眼科検査データ9Aの眼科画像5を表示させ、位置合わせ情報を基に眼科画像5上に第二眼科検査データのC/D比の描画情報を第二眼科検査データ1と区別して表示する。C/D比入力部13でC/D比を入力する際に、第二眼科検査データのC/D比の描画情報を反映して描画情報を編集する。
(もっと読む)
画像生成装置

【課題】認識された立体物と、当該立体物の撮影画像である立体物画像の領域に合成される代替画像との視認性を高めること。
【解決手段】車両の周辺領域を撮影する車載カメラによって取得された撮影画像を上方仮想視点で射影変換することで生成される俯瞰画像を表示画像として出力する画像生成装置。周辺領域に存在する立体物を認識して当該立体物の属性を示す立体物属性情報を出力し、この立体物属性情報に含まれている位置情報に基づいて撮影画像における立体物の画像領域である立体物画像領域を決定し、立体物属性情報に含まれている種別情報と姿勢情報とに基づいて特定された立体物の特定された向き姿勢での代替画像を出力し、この出力された代替画像が立体物画像領域の位置に合成された代替画像付き俯瞰画像が生成される。
(もっと読む)
画像表示装置、画像表示方法、および画像表示用プログラム
【課題】複数の画像の中から画像を検索して表示するにあたって、迅速に検索を行うことのできる画像表示装置、画像表示方法、および画像表示用プログラムを提供する。
【解決手段】複数の画像のそれぞれの画面中央に位置する顔の笑顔度を判定し(S63)、この判定した笑顔度に基づいて、複数の画像の中から代表画像を検索し表示を行うようにしている(S73)。また、代表画像の検索にあたって、S71で笑顔度に加えて類似画像は排除している(S71)。
(もっと読む)
画像照合装置、患者位置決め装置及び画像照合方法
【課題】放射線治療の患者位置決めの際に、3次元現在画像の断層画像数が3次元基準画像よりも少ない場合であっても、精度の高い2段階パターンマッチング(2段階照合)を実現することを目的にする。
【解決手段】3次元基準画像と3次元現在画像とを照合し、現在画像における患部の位置姿勢を基準画像における患部の位置姿勢に合うように体位補正量を計算する照合処理部22と、を備える。照合処理部22は、基準画像から現在画像に対して1次照合を行う1次照合部16と、基準画像又は現在画像の一方から1次照合の結果に基づいて生成された所定のテンプレート領域から、所定のテンプレート領域の生成元とは異なる基準画像又は現在画像の他方から1次照合の結果に基づいて生成された所定の検索対象領域に対して、2次照合を行う2次照合部17と、を有する。
(もっと読む)
画像生成装置
【課題】認識された立体物と、当該立体物の撮影画像である立体物画像の領域に合成される代替画像との視認性を高めること。
【解決手段】画像生成装置であって、車両の周辺領域に存在する立体物を認識して当該立体物の属性を示す立体物属性情報を出力し、立体物属性情報に含まれている位置情報に基づいて撮影画像における立体物の画像領域である立体物画像領域を決定し、立体物属性情報に含まれている色情報に基づく色で色付けられた立体物の代替画像を、立体物属性情報に含まれている種別情報に基づいて出力し、立体物画像領域の位置に代替画像出力部から出力された代替画像が合成されている代替画像付き俯瞰画像を生成する画像合成部を備えている。
(もっと読む)
画像処理システム、画像形成装置、及びコンピュータによる画像処理方法
【課題】利用者の要求に応じた多様なスタンプ画像を簡単に利用することができ、またスタンプ画像を記憶しておくためのメモリ容量を節減することが可能な画像処理システムを提供する。
【解決手段】PC11側で少なくとも1つのスタンプ画像を記したスタンプ設定頁を作成し、このスタンプ設定頁をPC11からMFP21へと送信して、MFP21側でスタンプ設定頁におけるスタンプ画像とその位置情報をHDD224に登録し、MFP21での印刷頁の印刷のときにスタンプ画像とその位置情報をHDD224から読出して、スタンプ画像を印刷頁におけるその位置情報に対応する位置に合成し、このスタンプ画像を合成した印刷頁をプリンタ213で記録用紙に記録する。
(もっと読む)
画像センサのマーカ検出機能試験方法及び装置
【課題】画像センサのマーカ検出機能の試験を、人手による労力を軽減して行うことができるようにする。
【解決手段】評価試験画像3の背景となる評価試験背景用ビデオと、マーカ画像の基準となるマーカ基準画像1をそれぞれ用意し、マーカ基準画像1のサイズ、回転、縦横比、明るさを変化させたマーカ画像1aを、評価試験背景用ビデオから抜き出した背景用静止画像2上の指定位置へ上書きすることで、マーカ画像1aの位置やサイズ、回転、縦横比、明るさが既知の評価試験画像3を自動作成して、画像センサへ入力し、画像センサの出力結果と、評価試験画像3を作成する際に指定したマーカ画像1aの上書き位置やサイズを比較することで、画像センサのマーカを検出する機能を自動的に評価する画像センサのマーカ検出機能試験方法及び装置。
(もっと読む)
画像形成装置及び照合方法
【課題】無駄な照合処理を抑制する画像形成装置及び照合方法を提供する。
【解決手段】本発明の実施形態における画像形成装置は、画像データ記憶部と、複数の画像のパターンデータ及び前記パターンデータの回転対称情報を関連付けて記憶するパターンデータ記憶部と、前記パターンデータ記憶部から前記パターンデータ及び前記回転対称情報を読み出すアドレスを生成し、前記パターンデータ記憶部から出力された前記回転対称情報に基づき回転した前記パターンデータを選択する回転制御信号を生成する生成部と、前記パターンデータ記憶部から出力された前記パターンデータの回転データを作成し、前記回転制御信号から、照合する前記パターンデータを選択して、照合用パターンデータを出力するデータ回転処理部と、前記画像データ記憶部から出力される前記画像データと、前記照合用パターンデータを照合しその結果を出力する照合部と、を備える。
(もっと読む)
画像処理装置、および、画像処理装置の制御方法ならびに当該方法をコンピュータに実行させるプログラム
【課題】撮影者の技量に依存せずに、流し撮り画像を生成する。
【解決手段】奥行き情報取得部は、被写体までの奥行きを、その被写体が撮像された画像内の画素に対応付けて取得する。平滑化処理部は、画像内の所定の領域を除いた領域内の画素を対象画素として、その対象画素に対応する奥行きに応じた度合いの平滑化処理を対象画素の画素値に対して所定の方向において実行する。これにより、画像内の所定の領域を除いた領域内の画素にぼかしを生じさせ、流し撮り画像を生成する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】ユーザが着用している服が、重畳させる仮想の服より大きい場合に、不自然な表示となることを防止することができるようにする。
【解決手段】仮想試着システムは、ユーザを撮影した撮影画像に含まれるユーザが着用している服の画像を、予め用意された仮想服の画像で置き換える際に、仮想服の領域である仮想服領域から、ユーザの服の領域である服領域がはみ出しているはみ出し領域が存在する場合、仮想服領域と服領域を一致させる処理を行う。本技術は、例えば、ARを洋服の試着に応用した画像処理を行う画像処理装置に適用できる。
(もっと読む)
走行路認識装置及び走行路認識用プログラム
【課題】高度な計算処理能力を有しない低廉な装置であっても走行車線上の標示線を遠方まで高精度で検出する。
【解決手段】領域解像度設定部16が、外界撮像部11が撮像した画像に対して、移動体の前方かつ近傍に第1画像処理領域を設定すると共に、移動体運動情報取得部14が取得した移動体の速度情報が示す移動体の速度が所定値以上の場合に、移動体の速度が速くなるに従って位置が第1画像処理領域より徐々に遠方となり、かつ移動体の速度が速くなるに従って大きさが第1画像処理領域より徐々に小さくなる第2画像処理領域を少なくとも1つ設定し、領域解像度設定部16で設定された画像処理領域から標示線を検出する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】ラインセンサの読み取り時に発生する位置ずれを主走査及び副走査のどちらの方向に対しても補正する画像処理装置及び画像処理方法を提供すること。
【解決手段】実施形態の画像処理装置は、カラー用の複数のラインセンサから構成されるラインセンサ部と、前記複数のラインセンサで読み取られたカラー信号毎に画素単位で保存する画像メモリ部と、前記画像メモリ部に保存されるカラー信号毎の画素を用いて、画像処理対象とする注目画素とその周辺画素を含む画素配列を画像処理単位として生成する画素配列生成部と、前記画素配列から基準色となる基準画素配列を生成する基準色算出部と、基準画素配列を構成する画素の画素値と前記画素配列を構成する画素の画素値から前記カラー信号毎の回帰直線を算出する回帰直線算出部と、前記回帰直線を用いて前記注目画素の画素値を補正した補正画素配列を前記カラー信号毎に生成する色ずれ補正部と、前記補正画素配列と前記画素配列とを所定の混合率で混合する補正信号混合部と、を有する。
(もっと読む)
三次元計測装置、三次元計測装置の制御方法、およびプログラム
【課題】パターンの1周期を撮像素子の少ない画素数でサンプリングした上で交点間隔の誤差を低減し、三次元計測の精度を向上する。
【解決手段】明部と暗部とが交互に配置された第1の明暗パターン光が投影された対象物を撮像して取得される第1の画像の階調値と、当該第1の明暗パターン光の位相をずらした第2の明暗パターン光が投影された当該対象物を撮像して取得される第2の画像の階調値とを用いて、当該第1の明暗パターン光と当該第2の明暗パターン光との複数の交点位置を検出する検出部と、検出部により検出された複数の交点位置に含まれる第1の交点位置と当該第1の交点位置と隣接する第2の交点位置とに基づいて、第3の位置を算出して、当該第3の位置の間隔に基づいて対象物の三次元位置を計測する計測部と、を備える。
(もっと読む)
画像処理装置およびその方法
【課題】 第一の解像度を有する複数の画像データから、第一の解像度よりも高い第二の解像度を有する画像データを合成する場合に適切な処理が可能な合成パラメータの設定を可能にする。
【解決手段】 撮像装置100は、撮像部101-125から、複数の視点から撮像して得られた、第一の解像度を有する複数の第一の画像データ、および、撮像における撮像情報を入力する。CPU201は、撮像情報に基づき、第一の画像データから第一の解像度よりも高い第二の解像度を有する第二の画像データを合成するための合成パラメータとして複数の候補値を設定する。CPU201は、複数の候補値から選択された候補値を合成パラメータとして、複数の第一の画像データから第二の画像データを合成する。
(もっと読む)
画像理装置および方法、並びにプログラム
【課題】右画像および左画像からなる立体画像の視差を正確に検出する。
【解決手段】視差検出部は、右画像と左画像からそれらの画像の各画素の視差を示す視差マップを生成するとともに、その視差の確からしさを示す信頼度マップを生成する。奥行き情報推定部は、右画像または左画像から、画像上の被写体の奥行きを示す奥行き情報マップを生成する。奥行き視差変換部は、奥行き情報の視差情報への変換式を用いて、奥行き情報マップを擬似視差マップに変換する。視差合成部は、信頼度マップを用いて、視差マップと擬似視差マップとを合成し、補正視差マップを生成する。本発明は、画像処理装置に適用することができる。
(もっと読む)
注視者検知装置
【課題】 対象物を注視する注視者数を正確に計測する。
【解決手段】 この発明に係る注視者検知装置は、画像データに映った人物の顔を検出し、顔情報データを生成する顔検出部と、この顔検出部が生成した顔情報データを記録する顔検出状況記録部と、所定の単位時間ごとに注視判定指示を発行する注視判定指示部と、この注視判定指示部が注視判定指示を発行したとき、前記顔検出状況記録部が記録する顔情報データの人物による注視時間を計測する注視判定部と、この注視判定部で計測された顔情報データの人物による注視時間を記録する注視時間記録部と、この注視時間記録部に記録された注視時間が注視規定時間を超えた顔情報データの人物を注視者として注視者数を集計する注視者数集計部とを備えた。
(もっと読む)
画像処理装置、画像処理方法、コンピュータプログラム
【課題】 動画像から切り出した複数のフレーム静止画像を重ね合わせて一枚の静止画像を構成する際、フレームの中央は明るいが端に行くにつれ暗くなるといった画像内の明るさムラの影響で、構成後の静止画像の画質が低下してしまうこと。
【解決手段】 各フレーム静止画像内の注目画素から基準画素までの距離を計算し、それに応じて重ね合わせに用いるフレーム静止画像を、重ね合わせ平面上の画素ごとに切り替えて構成を行う。これによって、明るさムラの影響を受けにくいように各フレーム静止画像を重ね合わせることができ、構成後の静止画像の画質の低下を抑えることが可能になる。
(もっと読む)
画像処理装置及びX線診断装置
【課題】カテーテル手技時における関心領域の設定の自動化。
【解決手段】画像演算・記憶部10は、被検体の血管が造影されていない第1透視画像データと、被検体に投与された造影剤により血管が造影された第2透視画像データとを記憶する。画像演算・記憶部10は、第1透視画像データを画像処理して第1透視画像に含まれるカテーテル領域を特定する。画像演算・記憶部10は、第2透視画像データを画像処理して第2透視画像に含まれる血管領域を抽出する。画像演算・記憶部10は、カテーテル領域の端点の位置に基づいて血管領域に関心領域を設定する。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】 複数の視点から撮像した撮像画像データに基づいて合成画像を生成する際に、合焦する領域がぼけてしまうのを抑制し、該合焦する領域外のぼけた領域の画質を向上させることを目的とする。
【解決手段】 領域ごとの合焦の状態を示す合焦状態情報に基づいて、撮像画像データと補間画像データとに対する重み係数を領域ごとに設定し、その重み係数に基づいて、撮像画像データと補間画像データとを合成する。合焦する領域における補間画像データに対する重み係数は、合焦する領域以外の領域の中の少なくとも一部の領域における補間画像データに対する重み係数よりも小さい。
(もっと読む)
221 - 240 / 3,964
[ Back to top ]