
Fターム[5B057DA12]の内容
Fターム[5B057DA12]に分類される特許
1,981 - 2,000 / 2,013
自動顕微鏡スライド組織サンプルマッピング及び画像取得
この方法は、組織サンプルセットの画像を受け入れる工程(620)を備える。少なくとも1つの他の組織サンプルに対する各組織サンプルの画像中の位置は、電子的に識別される(640)。各組織サンプルは、組織サンプル位置の識別に基づいて電子的に識別される(660)。 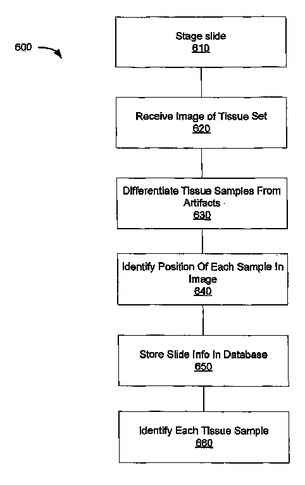 (もっと読む)
(もっと読む)
電子画像蓄積方法、電子画像蓄積装置、及び電子画像蓄積システム
電子画像蓄積方法は、顔画像登録フェーズ及び画像整理フェーズを有する。前記顔画像登録フェーズは、登録画像が入力されるステップと、前記登録画像中の顔画像の顔の特徴量を求めるステップと、前記特徴量を登録顔画像として記憶するステップとを含む。前記画像整理フェーズは、整理対象画像が入力されるステップと、前記整理対象画像中の顔画像の顔の特徴量を求めるステップと、前記求めた整理対象画像中の顔の特徴量に該当する特徴量の顔を前記登録顔画像から検出するステップと、前記整理対象画像と前記検出した登録顔画像とを関連付けるステップとを含む。 (もっと読む)
試料の面積またはコンフルエンスを決定するための方法と装置
試料の面積またはコンフルエンスは、試料と試料の周りのバックグラウンドに関する定量的位相データを得ることにより決定される。試料の境界は、位相データ測定値のヒストグラムを作成し、ヒストグラムの導関数を取って、それにより最大スロープの点を決定することにより、定量的位相データから決定される。境界に適用可能なデータ値を求めるために、既定のデータ値を上回るか下回るデータ値は試料内にあると見なすように導関数上の最もよく適合する線が使用される。 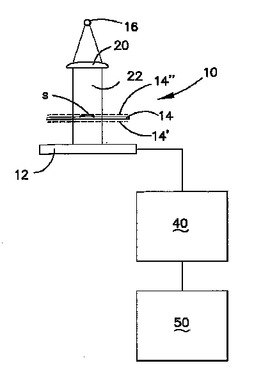 (もっと読む)
(もっと読む)
人の移動監視方法およびシステム
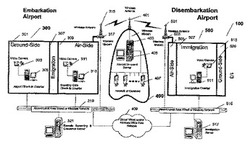
本発明の人の移動監視方法は、パブリックエリアからセキュアエリアへの人の移動経路における第一のポイントで、個人のバイオメトリクスデータおよび関連身元確認データを取得し、
セキュアエリアにおける第二のポイントで、個人のバイオメトリクスデータおよび関連身元確認データを取得し、第二のポイントにおいて取得された身元確認データを、第二のポイントで取得されたものと比較し、整合性がある場合には、この整合性のある身元確認データについて、第一のポイントで取得された関連イメージを、第二のポイントで取得された関連イメージと比較することを特徴とする。
(もっと読む)
フィーチャー認識のための装置及び方法
顔認識システムは画像センサ(100)を備え、当該画像センサ(100)の出力は、検出モジュール(102)へと送られ、検出モジュール(102)の出力は、認識モジュール(104)へと送られる。検出モジュール(102)は、未知の個数の顔を検出して位置を特定することができる(存在する場合)。当該手順の主要部分の後には、セグメンテーションが実施される、即ち、当該画像内の顔候補の領域が選択される。その後、小さすぎる領域を取り除き、且つ、取り扱う選択領域について特定の縦横比を指定することによって、結果をより信頼できるものとすることができる。認識モジュール(104)は、検出モジュール(102)から受け取ったデータを、既知のフィーチャーからなるデータベース内に記憶されたデータと照合し、「一致度」が、予め定められた信頼性レベルよりも高いと判定された場合には、関連する被写体の識別情報が、出力の信頼性のレベルを示す信号と共に、当該システムの出力へと送られる。当該システムは更に解析器(106)を含み、出力の信頼性のレベルが、予め定められた閾値(比較器(108)によって設定される)よりも低いと判定された場合には、検出モジュール(102)の出力は、解析器(106)にも送られる。解析器(106)は、信頼性の低さの理由を判定するために、検出モジュール(102)からのデータの少なくとも一部について評価を行い、更に、例えば「カメラに近寄って下さい」「左/右に動いて下さい」等の言葉による指示を指示対象の被写体に与えるために、音声合成器(110)へと信号を出力する。出力の信頼性が、予め定められた閾値に達している場合には、例えば言葉によるグリーティングが、被写体に示されるようにしてもよい。  (もっと読む)
(もっと読む)
関心のある複数の対象物を関心のあるフィールド内で組織化するシステム

【課題】
【解決手段】 スクリーニングシステムであり、生体試料のスクリーニングを補助するシステムである。生体試料の画像が得られ、その画像から画像データを生成する。関心のある対象物(OOI)は、画像データから同定される。OOIsは、関心のある複数のフィールド(FOIs)に、少なくとも部分的にその他のFOIsへのOOIsの振り分けに基づいて、振り分けられる。例えば、他のFOIsに割り当てられていないOOIsは、選択されたFOIに割り当てることができる。OOIsはFOIs内でグループ分けしてFOIs内に含まれるOOIsの数を最大にすることができる。あるいは、代替的に、全てのOOIsを含むことが要求されるFOIsの数を最小にすることができる。OOIsの割り当てが完了すると、視野(FOV)が各FOIに呈して走査され、技術者の観察用にOOIsを呈示することができる。
(もっと読む)
組み込みアプリケーションに適した、画像における赤目の検出と補正を行うシステム及び方法
画像における赤目の検出及び補正を行うシステム(10)及び方法が説明される。一態様では、入力画像(12)がサブサンプリングされて、サムネイル画像(44)が生成され、このサムネイル画像(44)において、赤目ピクセルエリア(18)が検出される。別の態様では、当初の色値を備えたピクセルのラインを有する入力画像(12)が処理される。入力画像(12)の各エリアに対応する1つ又は複数の赤目ピクセルエリアが検出される。検出された赤目ピクセルエリアに対応する入力画像(12)の各ピクセルは、隣接するライン(262)のピクセルに関係なくライン(260)ごとに赤目ピクセル又は非赤目ピクセルとして分類される。赤目ピクセルとして分類された入力画像(12)のピクセルの当初の色値は補正される。 (もっと読む)
画像などの既存の位相情報を有するデータ配列を処理するためのニューラルネットワーク及び該ネットワーク使用方法
相対的な位相情報を有するデータ配列を処理するためのニューラルネットワークであって、人工ニューラルネットワークのノットに対応するセル(Ki)のn次元配列を備え、前記セルのそれぞれが、前記セル(Ki)に直接隣接するとともに該セル(Ki)の近傍を形成する周囲のセル(Kj)に対する結合を備え、前記セル(Ki)のそれぞれが、前記周囲のセルに直接隣接する1つのセルへの各結合のためのインプットを備えるとともに、1つ若しくはそれ以上の前記直接隣接するセル(Kj)への結合のためのアウトプットを備え、前記セル(Ki)と前記直接隣接するセルの間の前記結合が重み(wij)により決定され、前記セルのそれぞれが、前記セル(Ki)の活性値或いは活性化関数(Ai)として定義される内部値により特徴付けられ、前記セル(Ki)のそれぞれが、信号処理を実行することによりセルのアウトプット信号(ui)を作り出し、セル(Ki)の前記出力信号(ui)が前記直接隣接するセルの入力値の関数であり、セルのそれぞれが、対応するセルの開始値であり、前記ニューラルネットワークの特定数の相互作用的処理段階の後に、セル(Ki)の内部値或いは出力値(ui)を、一意的に関連付けられたデータ・レコード(Pi)のための新たに得られた値(Ui)としてみなすことにより、処理が行われることを特徴とするニューラルネットワークである。 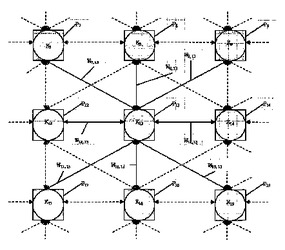 (もっと読む)
(もっと読む)
分類プロセスへの空間的知見の組込み
発明者は対象の空間的位置に基づく複数の異なる分類子を使用することを提案する。このアプローチの背景には、複数の分類子の方が特徴空間全体をカバーする“ユニバーサル”分類子よりも正確に局所コンセプトを学習できるのではないか、という直感的なアイデアがある。局所分類子を採用すれば、特定の類に属する複数の対象がこの特定類中において互いに高度の類似性を有することになる。局所分類子の採用は、特に分類子がカーネル方式である場合、メモリー、ストレージ及び性能全般の向上にもつながる。ここで使用する語“カーネル方式分類子”とは元の訓練データを、分類タスクを容易にする、より高い次元の空間にマップするためにマッピング機能(即ち、カーネル)が使用されている分類子を意味する。 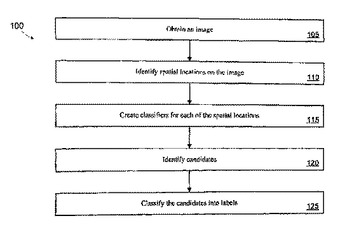 (もっと読む)
(もっと読む)
車両システム
両システムを操作する操作装置と、操作装置を介する車両システムの操作を制御する制御部とを備えた自動車における運転のための車両システムにおいて、操作装置への操作アクセスが車両ドライバにより行われるか、車両の他の乗員により行われるかを識別するために構成されている装置が設けられおり、制御部は操作装置を介する車両システムの操作を少なくとも、操作装置への操作アクセスが車両ドライバにより行われるか、車両の他の乗員により行われるかに依存して制御するよう構成されていることを特徴とする、車両システムが提案される。独立請求項の特徴を備えた本発明による車両システムは、車両システムに車両ドライバがアクセスするか、その他の車両の乗員がアクセスするかに依存して操作が制御されるという利点を有する。したがって、車両ドライバを本来の運転任務から過度に注意を逸らさせる可能性のある操作アクセスは効果的に阻止される。しかしながらそれと同時に車両システムはその他の車両乗員に対して少なくとも広範に操作可能のままであるか、完全な範囲で操作可能のままである。 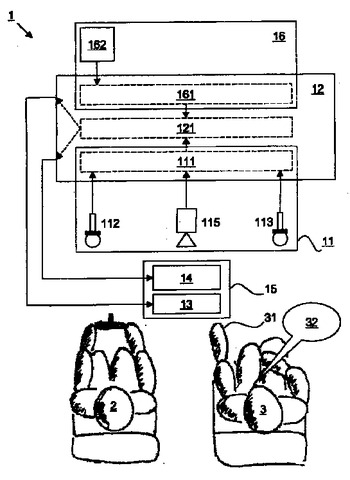 (もっと読む)
(もっと読む)
有界三次元対象物の分類と空間ローカライゼーションのためのコンピュータ視覚システム
本発明は、有界三次元対象物の認識、分類、および空間ローカライゼーションのためのシステムと方法に関する。特には、対象物の認識、分類、およびローカライゼーションのためのコンピュータ化された方法に関する。本方法は、カメラにより記録された、または対象物のCAD表現を使用して構築された多数のトレーニング図に基づいて、トレーニングデータベースを生成することを含む。特徴的曲線は、トレーニング図から導出され、曲線のプリミティブが検出される。フィーチャの本質的および非本質的記述子が、対象物のクラスおよび図の姿勢状態に関するデータと共にデータベースに格納される。最終的には、認識は二段階で行われる。最初は、認識図の本質的記述子がデータベースの記述子と比較される。二番目に、最良の整合フィーチャから、どのフィーチャが、同じ姿勢状態にある同じ対象物クラスであることを示唆するという意味で、相互に一致するかが調べられる。 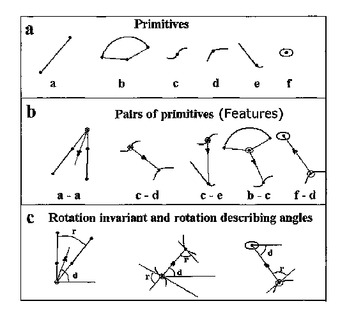 (もっと読む)
(もっと読む)
局所的曲率分布パターンの分析方法
複数の3Dボリューム・ポイントを含むディジタル画像中の病変部位及びポリープを検出する方法を提供する。この方法は、画像中の曲面を識別し(101)、曲面中のそれぞれのポイントに関して、第1曲率測度を計算し(102)、曲面中のそれぞれのポイントに関して、それぞれのポイントが1組のリングの中心点となり、それぞれのリングがこのリングの中心点から測地学的に等距離であるようにそれぞれのポイントを中心に1組のリングを形成し(103)、それぞれのリングに関して、第1曲率測度の標準偏差を計算し(104)、第1曲率測度の標準偏差が最小のリングを選択する(105)ステップを含む。選択されたリングに関して、第1曲率勾配を計算し(107)、曲率勾配がポリープまたは病変部位として予測されるパターンから逸脱しているポイントを曲面から消去する(108)。 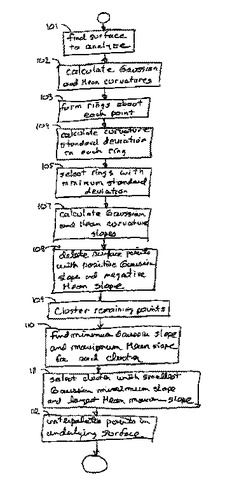 (もっと読む)
(もっと読む)
嗜好データ処理装置及びプログラム
【課題】客の嗜好性を容易に把握することを可能とする。
【解決手段】嗜好データ処理装置10では、カメラ1a、1b〜na、nbによりテーブル上に配膳された食器及びテーブルに着いている客の画像が撮影され、撮影された食器画像から食器内の料理及び食べ残された料理が判定されて嗜好データとして客テーブル162に記憶されるとともに、客の画像から客の属性が判定され、その属性データが客テーブル162に記憶される。そして、客の属性データ、その客が飲食した料理名称及び食べ残された料理名称等の嗜好データがレポートとして印刷出力される。
(もっと読む)
マイクロ流体装置用の画像処理方法およびシステム
マイクロ流体装置の画像を処理する方法である。この方法は、マイクロ流体装置の第1画像を受信する。第1画像は第1状態に関連している。さらに、この方法は、マイクロ流体装置の第2画像を受信する。第2画像は第2状態に関連している。さらに、この方法は、第1画像と第2画像を第3座標空間に変換する。さらに、この方法は、変換された第1画像と変換された第2画像に関連した情報に少なくとも基づいて第3画像を取得し、また、第1状態と第2状態に関連した情報を取得するべく第3画像を処理する。 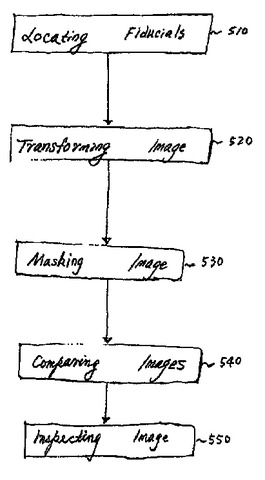 (もっと読む)
(もっと読む)
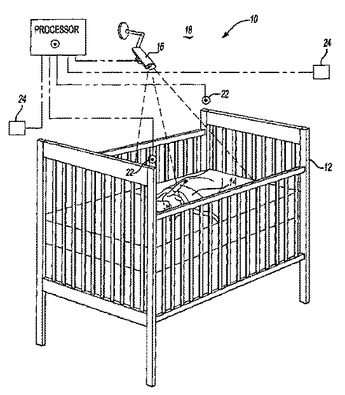
就寝中の乳幼児を監視する方法
コントローラに第1の複数のピクセルの位置情報を信号送出することによって、幼児の参照イメージを生成する、突然死症候群に関連する幼児の危険度の高い動きを検出する方法。第1の複数のピクセルは参照イメージを生成するコントローラに保持される。幼児の第2の電子イメージがそのコントローラに信号送出される第2の複数のピクセルを生成している。このコントローラは、その幼児が危険度の高い動きをしたかどうかを決定するために、第1の複数のピクセルと第2の複数のピクセルとの相関関係を検出することにより、第2の電子イメージを第1の電子イメージと比較する。
 (もっと読む)
(もっと読む)
信号処理装置、信号処理プログラム、および電子カメラ
【課題】本発明は、色変換処理を画素ごとに変更するに際して、ノイズの影響を受けにくくすることを目的とする。
【解決手段】本発明は、色変換処理を実施する色変換部と、その色変換の係数群に適正係数群を設定する係数適正化部とを備える。この係数適正化部は、処理対象の画素を含むように局所域を設定し、局所域の画素信号に基づいて、平均色情報、平均輝度情報、および平坦度の少なくとも一つを含む『局所域の特徴情報』を算出する。係数適正化部は、この局所域の特徴情報に基づいて、処理対象の画素に使用する適正係数群を決定する。
(もっと読む)
生体の顔認定システム
被験者の顔が現実の被験者の顔か否かを評価するシステム。被験者の顔が種々のイリュミネーション条件下で照らされ、被験者のイメージが種々のイリュミネーション条件に対して得られる。種々のイリュミネーション条件で得られるイメージ間の差分を使って被験者の顔が現実の人の顔かどうかを判定する。 (もっと読む)
構成要素に基づいた物体の同一性確認システムを訓練するシステム及び方法
構成要素に基づいた顔認識システムを訓練するために、事例として用いる構成要素を決定するシステムと方法が提示される。一つの実施形態においては、構成要素の初期の形状と大きさが決定され、訓練集合が構築され、構成要素認識分類器が訓練され、そして分類器の精度が予想される。構成要素は四方向(上、下、左および右)のそれぞれの方向へ暫定的に拡張され、分類器の精度に及ぼす影響が決定される。その後、構成要素は分類器の精度を最大化する方向へ拡張される。処理は分類器の精度を最大化するために多数回実行しても良い。  (もっと読む)
(もっと読む)
基準パターン抽出方法とその装置、パターンマッチング方法とその装置、位置検出方法とその装置及び露光方法とその装置
テンプレートマッチングのために有効な基準パターンを適切に効率良く抽出することのできる基準パターン抽出方法を開示する。本発明において、ウエハを撮像して得た画像情報上の観察視野(VIEW_Area)となり得る最大の範囲である最大視野範囲(OR_Area)内において、ユニークさが互いに異なり、かつ、その最大視野範囲(OR_Area)内に任意に配置される観察視野(VIEW_Area)内においてもユニークであると認識されるユニークなパターンを複数抽出する。そして、抽出されたユニークなパターンの全てを、観察視野(VIEW_Area)が取り得る範囲とは無関係に、基準パターン(テンプレート)として設定する。各ユニークパターンは、各々がユニークなパターンであるエレメント、又は、ほぼユニークなパターンであるエレメントの組み合わせにより表される。  (もっと読む)
(もっと読む)
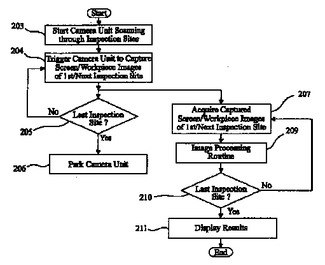
ワークピース上に印刷された堆積物を検査する検査システム及び方法
印刷スクリーンを通してワークピース上に印刷された堆積物を検査する検査システム及び方法である。このシステムは、カメラユニットと、制御ユニットとを備える。カメラユニットは、印刷スクリーン及びワークピースに対して移動可能である。印刷スクリーンは、複数の開口を有した本体を備える。ワークピースは、印刷スクリーンの開口を通してその上に堆積物が印刷されるものである。制御ユニットは、印刷スクリーン及びワークピースの少なくとも一対の対応する領域の画像を捕獲するようにカメラユニットを制御すると共に、画像を処理して、印刷スクリーンの画像を規定する複数の点の各々について、その点が開口のものであるか否かを決定するように動作可能である。そして、その点が開口のものである場合にだけ、対応する複数の点によって規定されたワークピースの対応する画像の対応する点が、堆積物のものであるか否かを決定する。これにより、ワークピースに印刷された堆積物の印刷特性の決定を、堆積物のものであると決定された点と開口のものであると決定された点との関係から可能とするものである。
 (もっと読む)
(もっと読む)
1,981 - 2,000 / 2,013
[ Back to top ]