
Fターム[5B057DA20]の内容
Fターム[5B057DA20]に分類される特許
181 - 200 / 763
位置姿勢計測方法及び装置
【課題】 カメラ及び距離センサを用いて高精度に物体の位置姿勢を計測する。
【解決手段】 物体の二次元画像の画像特徴と、保持された物体の位置姿勢における三次元形状モデルが二次元画像に投影される投影像とのずれを算出する。三次元座標情報と、保持された位置姿勢における三次元形状モデルとのずれを算出する。双方のずれの尺度を、同等の尺度になるように変換して、保持された位置姿勢を補正する。
(もっと読む)
画像対応装置、動作設定方法、プログラム

【課題】自動撮像記録機能の充実を図る。
【解決手段】撮像装置により得られる撮像画像から検出した被写体の構図を判定して、判定構図に応じた画像内被写体位置が得られるようにパン・チルト方向に雲台を駆動する。この際、パン・チルト方向における限界位置に至ったとしても、一定時間以上、判定構図が得られないときには、撮像記録を実行する。若しくは、他の被写体を探索する動作に移行させるなど、しかるべき動作を実行させる。
(もっと読む)
三次元姿勢測定装置および三次元姿勢測定方法
【課題】
輪郭が線状とならない回転体をステレオビジョンにより三次元姿勢を測定する。
【解決手段】
回転体を異なる2方向から撮像した一対の画像を取得し、前記一対の画像ごとに、測定対象である前記回転体の画像領域を抽出し、前記一対の画像ごとに、主成分分析により前記回転体の画像領域の主成分軸を算出して一の主成分軸を前記回転体の中心軸として設定し、前記一対の画像の中心軸上の点を対応付け、前記対応付けされた一対の画像から三角測量の原理により中心軸の三次元情報を求め、前記回転体の三次元姿勢を算出する。
(もっと読む)
画像処理装置
【課題】多重解像度画像を用いた対応点探索における処理コストを抑制しつつ、対応点探索の精度や信頼度を向上できる技術を提供する。
【解決手段】原基準画像と原参照画像とを取得する画像取得手段と、前記原基準画像と前記原参照画像のそれぞれの多重解像度画像を生成する多重解像度画像作成手段と、注目基準画像上の注目点に対応する対応点の探索処理を行うための探索基準点を、注目参照画像に設定する探索基準点設定手段と、前記対応点を探索する対応点探索手段と、前記探索処理が下位の階層から上位の階層に向けて実行されるように前記探索基準点設定手段と前記対応点探索手段とを制御する制御手段と、を備える画像処理装置であって、前記対応点探索手段は、前記対応点をサブピクセル分解能で探索するとともに、前記探索基準点設定手段は、探索された前記対応点に基づいて、注目参照画像の1つ上位階層の参照画像上に探索基準点を設定する。
(もっと読む)
画像検索方法およびシステム
【課題】クエリ画像および検索対象画像の類似性を、各特徴点の局所特徴量の類似性のみならず、被写体が同一であるか否かも考慮して判定できる画像検索システムを提供する。
【解決手段】クエリ画像および各検索対象画像の特徴点の局所特徴量を比較してNベストの対応点を抽出するNベスト抽出部2と、Nベスト対応点の局所特徴量をクエリ画像の対応する特徴点の局所特徴量と比較し、各局所領域のスケールおよびオリエンテーションの相違に関する分布を算出する相違分布算出部3と、相違分布に基づいて対応点候補を抽出する対応点候補抽出部4と、対応点候補およびクエリ画像の対応する特徴点の位置座標を正規化する正規化部5と、正規化された位置座標同士を比較して相対位置分布を算出する相対位置分布算出部6と、相対位置分布に基づいて対応点を抽出する対応点抽出部7と、抽出された対応点に基づいて検索対象画像を決定する類似画像決定部8とを具備した。
(もっと読む)
三次元指先位置検出方法、三次元指先位置検出装置、およびプログラム
【課題】2台のカメラで撮影した操作者の手指の画像から画像処理によって、操作者の手指の三次元位置を検出する。
【解決手段】第1のカメラで第1の方向から操作者の手指を撮影した第1の画像と、第2のカメラで前記第1の方向とは異なる第2の方向から操作者の手指を撮影した第2の画像とから、画像処理によって操作者の指先の三次元位置を検出する三次元指先位置検出装置であって、前記第1の画像から、前記第1の画像上における前記操作者の指先位置である第1の位置を検出する指先位置検出手段と、前記第2の画像から、前記第2の画像上における前記操作者の指軸の位置姿勢を検出する指軸位置姿勢検出手段と、前記第1の位置と前記指軸とに基づき検出される前記第2の画像上における前記操作者の指先位置である第2の位置と、前記第1の位置とから、前記操作者の指先の三次元位置を推定する三次元指先位置推定手段とを有する。
(もっと読む)
画像処理装置及びその制御方法とプログラム、記録媒体
【課題】特定の被写体を様々な構図で撮影したいとき、或いはゴルフのスイング撮影のように毎回同じ構図で撮影するときに、過去にその被写体を撮影した画像を手軽に参照できるようにする。
【解決手段】処理対象の画像を取得し(S11)、その処理対象の画像の被写体の特徴データを抽出し(S16)、その抽出した特徴データに応じた特徴データを有する画像を、記録媒体に記憶されている画像の中から検索し(S18)、その検索した画像と処理対象の画像とを表示する(S23)。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】2以上の画像の間において対応点を迅速且つ精度良く探索することが可能な技術を提供する。
【解決手段】同一の被写体を各々とらえた第1画像と第2画像とを含む複数の画像を取得し、第1画像に対して第1および第2探索基準点を含む複数の探索基準点を設定する。次に、第2画像について第1探索基準点に対応する第1対応点と第2探索基準点に対応する第2対応点とを探索することで、第1画像と第2画像との間における第1探索基準点に係る第1視差および該第1視差に係る第1信頼度と第2探索基準点に係る第2視差および該第2視差に係る第2信頼度とを導出する。そして、第1視差、第1信頼度、第2視差、および第2信頼度に基づき、第1画像において第1探索基準点と第2探索基準点とによって挟まれる演算基準点について、第1画像と第2画像との間における推定視差を決定する。
(もっと読む)
3次元シーンの区分的平面再構成
一群の2次元画像から3次元シーンを再構成するための方法、システム、及びコンピューター可読媒体が提供される。コンピューター化された再構成システムが、一群の2次元画像に対しコンピュータービジョンアルゴリズムを実行し、2次元画像内に示された環境の視覚特性をモデリングするのに用いられる候補平面を特定する。コンピュータービジョンアルゴリズムは、2次元画像の特徴間の関係及び類似度を表すエネルギー関数を最小化して、2次元画像のピクセルを3次元シーンの平面に割り当てることができる。3次元シーンはナビゲート可能であり、複数の2次元画像間の視点遷移を示す。  (もっと読む)
(もっと読む)
無線端末の機能への制御アクセス
本発明の様々な実施形態は、生体技術によって機器の使用を認証されているヒトが、生きているヒトであって、システムをだますことを意図しているある形式の記録ではないことを検証するのに使用されてもよい。ある実施形態では、測定される生体的特徴に変化を起こすことを試み、変化の前後で撮像された画像を比較して、変化が起きたかを検証してもよい。ある実施形態では、検証の複数段階を使用して、成り済ましによりセキュリティシステムをだますのを難しくしてもよいし、又は、機器の機能への異なる複数のアクセスレベルに対して異なる複数のレベルのセキュリティを提供してもよい。 (もっと読む)
道路形状認識装置
【課題】実際の道路形状を的確に検出することが可能な道路形状認識装置を提供する。
【解決手段】道路形状認識装置1は、自車両が走行する道路面について実空間上の距離Zと高さYの情報を有する距離データDを互いに異なる複数の地点で検出する距離高さ検出手段6と、複数の距離データDを自車両に近い側の群G1と遠い側の群G2とに分割し、群G1、G2の境界DL部分の距離データDを一方の群から他方の群に移し替えるごとに距離データDの近似直線L1、L2を算出する近似直線算出手段10と、距離データDを移し替えた群G1、G2ごとにそれぞれの近似直線L1、L2に基づく統計値をそれぞれ算出する統計値算出手段11と、統計値に基づいて近似直線L1、L2の組み合わせの中から1つを選択し、選択した近似直線L1、L2の組み合わせを用いて道路形状モデルを生成する道路形状モデル生成手段12とを備える。
(もっと読む)
情報処理装置及びキャリブレーション処理方法
【課題】カメラ内部パラメータやカメラ間の相対位置姿勢が変化した場合に、仮想現実空間の表示が観察者へ悪影響を及ぼすことを未然に防ぐことを可能とする。
【解決手段】
主撮像装置と副撮像装置により現実空間を撮影して得られた画像に仮想画像を合成して立体視のための画像を提供する情報処理装置は、主撮像装置の位置姿勢を計測し、保持部により保持されている装置間位置姿勢情報と計測された主撮像装置の位置姿勢とに基づいて副撮像装置の位置姿勢を算出し、計測された主撮像装置の位置姿勢と算出された副撮像装置の位置姿勢と保持されている主撮像装置及び副撮像装置の内部パラメータとを用いて、主、副撮像装置のそれぞれから得られた画像に仮想画像を合成する。情報処理装置は、主、副撮像装置により撮像された画像に基づいて、保持されている装置間位置姿勢情報や内部パラメータの情報の正当性を判断し、不当と判断した場合には保持されている情報を校正する。
(もっと読む)
三次元計測用画像撮影装置及びその方法
【課題】次に撮影する撮影の重複状況を把握でき、撮影を過不足なく効率的に行なえる三次元計測用画像撮影装置を提供する。
【解決手段】本発明による三次元計測用画像撮影装置1Bは、測定対象物2を単カメラにより撮影する装置で、撮影画像及びライブ画像を取得する撮影部3、撮影画像及びライブ画像から特徴点を抽出する特徴点抽出部61、撮影画像とライブ画像に重複する特徴点の三次元座標を求める三次元位置測定部7、測定対象物2の撮影範囲を三次元空間に表現するための撮影範囲画像に各特徴点を書き込み、撮影画像を各特徴点の位置が撮影範囲画像に書き込まれた各特徴点の位置に合うように、撮影範囲画像に座標変換して当てはめる撮影範囲画像形成部85、撮影範囲画像を表示する表示部4を備える。
(もっと読む)
距離測定方法
【課題】ステレオ計測法において被測定物のある角部と撮影した画像における角部の像とを品質良く対応させる方法を提供する。
【解決手段】ワークと撮像装置との距離を測定する距離測定方法にかかわる。ワークの形状情報を用いて参照部を設定し、参照部を複数の方向から見た参照部画像を生成するステップS1の参照部設定工程と、ワークを複数の方向から撮像装置にて撮影し、複数の撮影画像を生成するステップS3の撮像工程と、参照部画像を用いて複数の撮影画像において参照部が撮影された参照部像の場所を検出するステップS4の参照部検出工程と、参照部像の場所の情報を用いてワークと撮像装置との距離を検出するステップS5の距離測定工程と、を有する。
(もっと読む)
目の様態を検出する画像処理装置
【課題】本発明は、画像に含まれる目の状態を効率的に検出することを目的とする。
【解決手段】注目画像に含まれる目の画像から所定の目の状態を検出する画像処理装置は、注目画像から顔の画像の少なくとも一部を含む領域を顔領域として検出する顔領域検出部と、顔領域から目の画像を含む領域である目領域を検出する目領域検出部と、目領域検出部により検出された目領域の画像を変換した変換画像の画像ベクトルと、目の状態が既知の目の画像を含む複数のサンプル画像に基づいて算出された任意の目の状態を表すために用いられる1以上の固有ベクトルのうち、所定の目の状態に関連する固有ベクトルである所定固有ベクトルと、を用いて、目領域から所定の目の状態を検出する目状態検出部と、を備える。
(もっと読む)
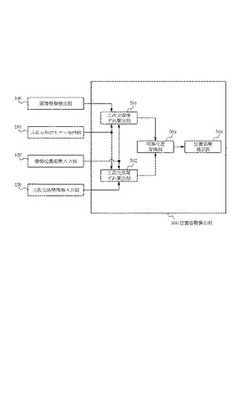
奥行推定装置、奥行推定方法および奥行推定プログラム
【課題】一様な被写体で複数のカメラ映像間における対応点が複数存在する場合であっても、奥行値の誤推定を軽減することが可能な奥行推定装置を提供する。
【解決手段】奥行推定装置1は、基準映像と、複数の隣接映像とを入力する映像入力手段10と、仮定奥行値ごとに、基準映像の各画素の画素値と、当該画素の仮定奥行値の視差に対応する複数の隣接映像の各画素の画素値との差分絶対値である隣接映像差分値を演算する対応画素差分演算手段20と、隣接映像差分値を、基準映像の画素位置ごとに加算することで差分加算値を演算する隣接映像差分加算手段30aと、差分加算値を、仮定奥行値と基準映像の画素位置とに対応付けて記憶する記憶手段40と、画素位置ごとに、差分加算値が最小となる仮定奥行値を記憶手段40において探索し、当該画素位置の奥行値とする奥行値決定手段60と、を備えることを特徴とする。
(もっと読む)
遺伝的処理装置、遺伝的処理方法およびプログラム
【課題】遺伝的処理において効率良く変換器を生成する。
【解決手段】入力データを処理して処理結果を出力データとして出力する少なくとも1つの処理部品を有する少なくとも1つの変換器から、遺伝的処理により新たな変換器を生成する生成部と、少なくとも1つの変換器に組み込むことができる複数の処理部品のそれぞれについて、新たな変換器に導入される導入確率を設定する設定部と、を備える遺伝的処理装置を提供する。
(もっと読む)
照明制御装置及びプログラム
【課題】自車照明がドライバの視認性に与える影響が大きい領域に適切に照明光が投光されるよう照明領域を設定する。
【解決手段】差分画像生成部22で、ヘッドライト16が点灯されているときに撮影手段12で撮影された点灯画像と、ヘッドライト16が消灯されているときに撮影された消灯画像との差分画像を生成し、自発光物認識部24で、差分画像の画素値が差分閾値以下の画素で、かつ点灯画像または消灯画像において対応する画素の画素値が高輝度閾値以上の画素を含む領域を自発光物と認識し、照明領域設定部26で、差分画像の画素値が差分閾値より大きい画素を含む領域に対応する車両前方の領域で、かつ自発光物の上方領域を除外した領域を、照明光を投光すべき照明領域として設定し、照明制御部28で、設定された照明領域に照明光が投光されると共に、照明領域以外の領域への照明光が減光または投光されないようにヘッドライト16の配光を制御する。
(もっと読む)
画像処理装置
【課題】画像データの情報量を有効に活用して、画像中の1つのグループとしてまとめるべき撮像対象を的確にグループ化することが可能な画像処理装置を提供する。
【解決手段】撮像手段2で撮像された画像Tを複数の領域rに分割する画像処理装置1において、画像T中の一の画素pi,jと隣接する画素pとの各画像データDの差分ΔDが第1閾値ΔDth未満である場合には一の画素pi,jを隣接する画素pとグループ化し、最終的に得られた各グループgをそれぞれの画像Tの各領域rとして画像Tを複数の領域rに分割する処理手段6と、一の画素pi,jを含むグループgにおける画像データDの平均値Daveを算出する平均値算出手段7とを備え、処理手段6は、一の画素pi,jの画像データDi,jと隣接する画素pが属するグループgの前記平均値Daveとの差分δDが第2閾値δDth以上である場合には一の画素pi,jと隣接する画素pとをグループ化しない。
(もっと読む)
画像処理装置、及び画像処理システム
【課題】距離センサを用いずに合成画像の立体物の変形を防ぐことを目的とする。
【解決手段】複数の撮像画像から合成画像を生成する画像処理装置であって、視野の異なる複数の撮像装置から各撮像画像を取得する画像取得手段201と、複数の撮像装置に撮影された対象物が存在すると仮定される平面を示す仮想面の位置を複数有し、複数の仮想面の位置から1の仮想面の位置を決定する位置決定手段203と、決定された仮想面の位置に対して、合成画像の点に対応する仮想面の点を求め、求めた仮想面の点に対応する2以上の撮像画像の点を求める対応点算出手段205と、算出された各撮像画像の点の輝度値が所定の条件を満たす場合、各撮像画像の点の輝度値を用いて合成画像の点の輝度値を決定する輝度決定手段207とを備える。
(もっと読む)
181 - 200 / 763
[ Back to top ]