
Fターム[5B057DA20]の内容
Fターム[5B057DA20]に分類される特許
1 - 20 / 763
画像処理装置、画像処理方法
被写体姿勢推定装置および映像描画装置
画像処理装置、撮像装置及び画像処理プログラム
焦点ずれしたピルボックス画像を利用して深度推定を行うためのシステム及び方法
多重解像度手順を利用してロバストな深度マップを生成するためのシステム及び方法
物体判別方法
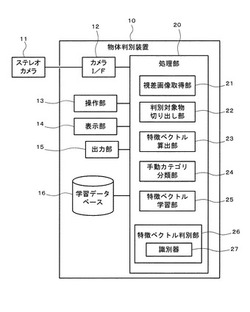
【課題】判別基準を判別対象ごとに個別に考える必要がなく、またカメラの設置位置や設置角度に対する自由度の大きい物体判別方法を提供する。
【解決手段】ステレオカメラで撮影して得た画像から判別対象物の視差画像を生成し、判別対象物の視差画像の各地点における面の勾配を求め、該面の勾配の連なり状況から、視差画像における面の折れ目の位置とその折れ目の方向をその判別対象物の特徴情報として抽出し、抽出した特徴情報に基づいて、判別対象物の種類を判別する。
(もっと読む)
車載カメラシステム及びその較正方法、及びその較正プログラム

【課題】撮像部の 内部パラメータと外部パラメータを容易に較正できる車載カメラシステムの較正方法を得ること。
【解決手段】車載カメラシステム1の較正方法は、撮像部307〜310により撮像された画像から予め設定された直線部分を有する認識対象物を認識し、画像から認識対象物の特徴点を抽出し、その特徴点を仮想球面に投影して仮想球面601に形成された特徴点列の形状に基づいて撮像部307〜310の内部パラメータを推定し、推定した内部パラメータを較正するとともに、特徴点に基づいて画像の俯瞰視点を算出し、その算出した俯瞰視点に基づいて撮像部307〜310の外部パラメータを推定し、その推定した外部パラメータを較正することを特徴としている。
(もっと読む)
類似画像判定装置、およびプログラム
【課題】原画像と検索対象画像の類否判定を容易に行うことができる類似画像判定装置を提供する。
【解決手段】類似画像判定装置1は、検索対象画像の輝度レベルを抽出する検索対象画像処理部22と、原画像の輝度レベルを抽出する原画像処理部13と、検索対象画像が原画像に類似しているか否かを判定する画像比較部23とを備えている。類似画像判定装置1は、正規化濃度値ヒストグラムを作成し、検索対象画像における輝度レベルの生起確率と原画像における輝度レベルの生起確率とを比較して検索対象画像と原画像とが類似しているか否かを判定する
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
相関演算装置
【課題】一律な照明変動や空間的に低周波な照明ムラに対するロバスト性が高く、かつSSDAの手法の適用により演算の高速化が可能な、新たな差分総和演算を行うことができる相関演算装置を提供する。
【解決手段】相関演算装置は、位置変数に依存した関数である第1関数データおよび第2関数データに対してローパスフィルタ処理を施し、第3関数データおよび第4関数データを生成するローパスフィルタ手段と、位置変数の1つの変数値における第1関数データと第4関数とを乗じた第1積データと、該変数値における第2関数データと第3関数データとを乗じた第2積データとの差分に基づき、該変数値における第1積データと第2積データとの相関値を算出し、変数値が変化する毎の相関値を積算して得られる積算値に基づき、第1関数データと第2関数データとの相関度を算出する相関演算手段とを備える。
(もっと読む)
対象検知方法及び対象検知システム
【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
画像処理装置、画像処理方法ならびにプログラム
【課題】 混色のキャリブレーションにおいて目標値算出時と測定値算出時で光沢の異なる紙を使用するとプリンタの混色特性以外の差異が発生し、キャリブレーションの精度が悪化する。
【解決手段】 上記課題を解決するため、本発明は、目標値と、第1のチャートの表面特性値である第1の表面特性を取得する第1の取得手段と、第2のチャートの表面特性である第2の表面特性値を取得する第2の取得手段と、前記第1の取得手段で取得した第1の表面特性値と前記第2の取得手段で取得した第2の表面特性値を比較し、該第1の表面特性値と該第2の表面特性値に閾値以上の差異があるか否か判定する判定手段と、前記判定手段により前記第1の表面特性値と前記第2の表面特性値の差異が閾値以下であると判定されると、前記目標値と前記第2のチャートの測定値を用いて混色のキャリブレーションを実行するキャリブレーション手段とを有することを特徴とする。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 減色処理において、にじみが支配的になったヒストグラムから、簡易的に精度よく文字色を選択する。
【解決手段】 色相環において設定した複数の領域と輝度方向に設定した複数の輝度レベルとに基づいて構成される複数の階級を定め、入力画像から各階級の頻度分布を作成し、階級間の色相差が所定の閾値以上あるか否かを判定する。ここで、所定の閾値以上あると判定した場合は色相が最大の階級の色情報と色相が最小の階級の色情報とを代表色として選定する。一方、所定の閾値以上ないと判定した場合は、頻度分布が最大の階級の色情報と当該最大の階級から最も輝度差がある階級の色情報とを代表色として選定する。そして、入力画像に含まれる各画素値を選定された代表色に置換する。
(もっと読む)
撮像装置及び撮像方法
【課題】簡易な装置で被写体の移動速度を測定することができる撮像装置及び撮像方法を提供すること。
【解決手段】第1の被写体までの距離を、該第1の被写体の大きさに基づいて算出する測距手段と、移動している第2の被写体を所定の時間間隔で連続撮影して複数の静止画像を生成する静止画像生成手段と、前記複数の静止画像のそれぞれから、前記第2の被写体の当該静止画像内における位置を検出する位置検出手段と、前記第1の被写体までの距離、前記複数の静止画像のそれぞれで検出された前記第2の被写体の位置の差、及び前記所定の時間間隔に基づいて、前記第2の被写体の移動速度を算出する算出手段と、を備えることを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】計測精度を向上させることができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、計測対象物を撮像したカメラの姿勢と、物体を撮像した仮想的なカメラの姿勢とが近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。また、CPU34cは、これら2種類のカメラの光学系または撮像素子の特性が互いに近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。CPU34cは、これらの調整を行った後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
画像処理装置、車両
【課題】コスト低減が可能な、ステレオカメラを用いた画像処理装置を提供する。
【解決手段】複数のステレオカメラを備え、車両周辺の対象物との距離を検出する画像処理装置100であって、車載されたセンサと、センサの検出信号を組み合わせて車両状況を判定し、車両状況に基づき画像処理対象の画像データを運転支援用のステレオカメラが撮影した画像データからドア開閉支援用のステレオカメラが撮影した画像データに切り替える状況判断・画像選択手段11と、状況判断・画像選択手段によって選択された画像データに、相関演算部が複数のステレオカメラに共通の相関演算処理を行うことを可能にする前処理手段12と、1つのステレオカメラが撮影した2つの画像データに相関演算を施す相関演算手段13と、相関演算手段の演算結果を用いて対象物までの距離を検出する距離検出手段14と、を有する。
(もっと読む)
運転支援装置
【課題】車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制する。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
(もっと読む)
3次元形状計測装置
【課題】対象物体の全周3次元モデルの計測に必要な情報を短時間に取得する。
【解決手段】スタジオ装置10は、パネル101〜105が側面及び上面に配置され接合されて底面が開放された形状の筐体に対して、筐体内部を複数方向から選択的に照射する照明装置111〜118を配備すると共に、筐体内部を複数方向から撮影する撮影装置121〜125を配置し、底面側から対象物体に被せて使用する。演算制御装置20は、照明装置111〜118に筐体内部を複数方向から選択的に照射させ、照射の切り替えに応じて任意の撮影装置の撮影画像を取得し、これらの撮影画像から対象物体の形状を示す3次元情報を演算し、この3次元情報に基づいて全周3次元モデルを作成する。表示装置30は演算制御装置20で作成された全周3次元モデルを表示する。
(もっと読む)
車線監視システム及び車線監視方法
【課題】走行中の車線がカーブしている車線であるか否かを簡易な構成において判定可能な「車線監視システム及び車線監視方法」を提供する。
【解決手段】後方カメラ1で撮影した自動車後方の画像フレーム中の白線上の各位置における白線の方向の、自動車側方位置における白線の方向に対する方向差Δiを、自動車から当該白線上の位置までの、自動車側方位置における白線の方向の距離cxiと共に求める。複数の画像フレームについて求めたQi :(cxi, Δi)を合成し、各Qiを取る直線Δ=mx+uを近似的に求め、直線の傾きが大きい場合には、走行中の車線がカーブしている車線であると判定する。
(もっと読む)
映像処理方法及び装置
【課題】深さ情報のみを用いて被写体を検出するに当たって、演算処理速度を高める。
【解決手段】映像処理方法は、映像の深さ情報を獲得するステップと、前記映像から目標物が存在する領域に対する第1関心領域を分離するステップと、前記第1関心領域から目標物に対する候補領域を検出するステップと、前記検出された候補領域が目標物に対応するか否かを判断するステップと、前記候補領域が目標物に対応する場合、前記候補領域を用いて目標領域を検出するステップと、前記検出した目標領域を用いて目標物の姿勢を推定するステップと、前記目標物をモデリングするステップと、を含む。
(もっと読む)
1 - 20 / 763
[ Back to top ]