
Fターム[5B057DA20]の内容
Fターム[5B057DA20]に分類される特許
81 - 100 / 763
撮像装置
【課題】 複数コアで分割処理するシステムにおいて、撮影時の状況に応じて最適な被写体検出を行う。
【解決手段】 撮像素子と、前記撮像素子から読み出される画像信号を複数の領域に分割する画像分割手段と、分割された画像を並列に処理する複数のカメラ信号処理手段を備え、前記画像分割手段は、前記カメラ信号処理手段の処理結果に応じて分割方法を制御する
ことを特徴とする撮像装置。
(もっと読む)
顔向き検出装置

【課題】ユーザの顔向きを精度良く検出できる顔向き検出装置を提供すること。
【解決手段】顔向き検出装置は、交差する縦縞及び横縞から構成された縞模様の光をユーザの顔に照射する(S11)。その顔をカメラで撮像する(S12)。撮像した顔画像から、光の縞模様を構成する矩形に対応する矩形対応部分をそれぞれ特定する(S13)。矩形対応部分ごとに、各矩形対応部分の変形具合に基づいて各矩形の法線方向を算出する(S14)。三次元モデルDB40に記憶された三次元の顔モデルの各部位の法線方向と各矩形の法線方向との誤差を算出する(S15)。誤差が閾値未満か否かを判断する(S16)。誤差が閾値より大きい場合には(S16:No)、閾値未満になるように顔モデルの三次元パラメータを変更する(S17)。誤差が閾値未満になったときの顔モデルの顔向きを運転者の顔向きとして決定する(S18)。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】撮像される画像内の被写体の動きからジェスチャを検出できるようにする。
【解決手段】奥行画像生成部101は、撮像される画像の画素単位の被写体の撮像位置からの距離からなる奥行画像を生成する。局所先端検出部102は、奥行画像の複数の画素単位で構成されるブロック単位で、撮像位置から近い部分の位置を局所先端部として検出する。凸部検出部103は、複数のブロックで構成される領域毎に、最も手前となる局所先端部となるとき、その局所先端部を凸部として検出し、凸部情報として凸部情報記憶部112に記憶させる。先端部情報更新部121は、検出された凸部となる局所先端部の位置を連続的に追跡し先端部情報記憶部122に記憶させる。軌跡ジェスチャ検出部106は、先端部情報記憶部122にフレーム単位で記憶される先端部情報より軌跡を求めてジェスチャを検出する。本発明は、ジェスチャ認識装置に適用することができる。
(もっと読む)
構造物モデル作成装置及びその方法
【課題】構造物の撮影画像に基づいて、構造物の面及び交線の位置を自動計測し、構造物モデルを自動的に作成し、表示可能な構造物モデル作成装置を提供する。
【解決手段】本発明による構造物モデル作成装置1は、コード付き標識CTを配置した測定対象面2の撮影画像3を取得する画像データ取得部4と、同一測定対象面に配置されたコード付き標識CTが同一グループに属するようにコード付き標識CTをグループ分けする標識グループ化部71と、測定対象面2の面方程式を算出する面方程式算出部72と、測定対象面間の交線を求める交線算出部74と、1つのグループに対応する測定対象面2に隣接する隣接測定対象面を特定する隣接面特定部73と、各グループに対応する測定対象面と隣接測定対象面との交線とを表示する表示部12とを備える。
(もっと読む)
レーザ密度分布推定装置、レーザ密度分布推定方法、及びプログラム
【課題】森林域の地形の航空レーザ計測において、地表へ到達するレーザの密度が樹木密集度や地表の傾斜に応じて受ける影響を評価する。
【解決手段】林分収穫表に示される樹木の属性(樹種・樹齢)別の標準密度に基づいて、樹間距離を推定する(S64)。レーザの地表への到達率をシミュレーションし、樹木からの距離に応じた到達率関数を属性別に求める。樹間距離と到達率関数とから各属性の植生域の樹木一本当たりのセル内のレーザ到達率を求める(S66)。森林計画図から林班等の属性を取得し、対応する属性のセル内レーザ到達率に基づいて、当該林班等における到達レーザ密度を定める(S68)。また、標高データ48から傾斜区分図50を生成し(S72)、到達レーザ密度に対して傾斜補正を行う(S70)。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】計測時間を短縮化でき、装置構成が複雑化することを防ぐ。
【解決手段】三次元形状測定装置1は、測定対象物11上に投影パターンを照射する投影部13と、測定対象物11を撮像する撮像部14と、投影部13に縞パターンを照射させ、照射させる縞パターンの位相を変化させながら、撮像部14に測定対象物11を繰り返し撮像させるとともに、測定対象物11上に照射させた縞パターンの画像を複数取得する第1の制御部と、第1の領域のみに所定の光を照射させて撮像した第1の画像と、第2の領域のみに所定の光を照射させて撮像した第2の画像とを取得する第2の制御部と、第1の画像と第2の画像との差分に基づいて、縞パターンに含まれる縞の夫々を識別する基準線を検出する基準線検出部と、基準線に基づいて、測定対象物11の三次元形状を測定する形状測定部と、を備える。
(もっと読む)
画像処理装置
【課題】ヒストグラム生成時におけるヒストグラムRAMへの書き込みアクセスと、ヒストグラム参照時におけるヒストグラムの読み出しアクセスとが衝突することがない、リアルタイムのヒストグラム処理が可能な画像処理装置を提供する。
【解決手段】画像処理装置1は、入力画像データに基づきヒストグラムが生成される第1期間の終了後、ヒストグラムRAM105に保持された当該ヒストグラムをCPUに対して参照可能に開放する第2期間の終了時刻を基準としてCPU106がヒストグラムの参照処理に要する所定の時間だけ遡った時刻から、当該第2期間の終了までの間は、CPU参照可能信号(フラグ)112を立ち下げ、CPU106による前記ヒストグラムの参照を禁止する制御を行う。
(もっと読む)
ガイド装置およびガイド方法
【課題】 コミュニケーションをとる相手の使用言語が不明の場合であっても言語を判定することのできるガイド装置およびガイド方法を提供する。
【解決手段】 ガイド情報を表示し(S23)、上記ガイド情報を観察する対象人物の表情をモニタし(S22)、モニタされた上記対象人物の表情を判定し(S25)、上記ガイド情報の表示中に、上記判定された上記対象人物の表情に応じて上記対象人物に対するメッセージ内容を決定し、上記対象人物に上記メッセージを表示する(S28〜S32)。
(もっと読む)
撮像装置及び撮像方法
【課題】1回の撮影によって撮影者と被写体の両方の好みの表情の画像を得ることができる撮像装置及び撮像方法を提供すること。
【解決手段】スルー画表示前に、被写体200に表情の画像の採点をしてもらい、その採点結果をR値と対応付けて表情データベース116aに格納しておく。撮影前のスルー画表示時には、撮像素子107を連続して動作させて得られるスルー画像における顔部の画像からR値を算出し、算出したR値に対応する点数を表情データベース116aから抽出し、抽出した点数に基づいて撮影前の被写体200の表情のレベルを表示パネル111に表示させる。
(もっと読む)
三次元地図作成装置およびその窓領域検出装置
【課題】写り込みや日照条件により窓領域の画像が均一にならない場合でも窓領域を高い精度で検出できる窓領域検出装置およびその検出結果を電波伝搬推定におけるシミュレーションに利用する三次元地図作成装置を提供する。
【解決手段】第1窓領域候補検出部47は、ビルの低中層階では窓領域に隣接ビルなどの写り込みが生じることから撮影角度によって見え方が異なることに着目し、撮影角度の異なる3つの全方位画像IC,IR,ILを、それぞれの注目ビルの画像が重なるように位置合わせして各画素の対応関係を求め、対応する画像領域同士を比較して画素値の差異が大きい矩形領域を第1窓領域候補Rw1として検出する。
(もっと読む)
画像形成装置、画像処理方法
【課題】複数のコアを持つ画像形成装置において、描画処理部の待機時間を縮小し、複数のコアにより効率的に印刷することが可能な画像形成装置及び画像処理方法を提供すること。
【解決手段】ページの領域毎に描画処理手段16が描画処理する画像形成装置200であって、印刷データを格納する印刷データ格納手段13と、印刷データを解析し、描画対象とされるオブジェクトの描画命令をページ毎に記述した描画命令データを生成する描画命令生成手段12と、描画命令生成手段と並行して印刷データを解析し、描画処理手段16が受け持つ領域を決定するための最適化情報を作成する最適化情報作成手段14と、描画命令データと最適化情報を記憶する中間データ記憶手段15と、最適化情報に基づき受け持つ領域を決定し、領域毎に描画命令データを描画処理する描画処理手段16と、を有することを特徴とする。
(もっと読む)
道路使用弱者保護システム
【課題】車両と道路使用弱者との衝突を回避する道路使用弱者保護システムを提供する。
【解決手段】視覚的場面の距離マップがステレオビジョンおよび協働する画像処理システムにより生成され、関心領域外および衝突が不可能の対象物がフィルターにより取り除かれ、また道路表面も取り除かれる。距離ビンにクラスター分けされた対象物がセグメンテーションにより分離される。主要コンポーネント解析によってコンポジット距離マップが生成され、連結コンポーネント篩い分けフィルタにより処理される。対象物は一つ又は複数のハーモニックプロファイルおよびほかの特性を用いて、インクルーシブ、エクスクルーシブ及びハーモニックネットワークの組み合わせで種類分けの基準を生成し、認識プロセッサを用いて判別される。
(もっと読む)
3次元形状の骨格モデル作成方法及び装置並びに3次元形状の寸法測定方法及び装置
【課題】本発明は、対象物体の3次元形状データに基づいてその特徴的な部位を正確に設定できる3次元形状の骨格モデルの作成方法及び装置並びに骨格モデルを用いた3次元形状の寸法測定方法及び装置を提供することを目的とするものである。
【解決手段】骨格モデル作成装置の制御部1は、対象物体表面の3次元形状データを取得するデータ取得部10、取得した3次元形状データを主成分分析により主軸を算出して予め設定された座標軸方向に主軸が一致するように座標変換処理を行う正規化処理部11、正規化処理された3次元形状データを用いて対象物体を複数の異なる方向からみた輪郭に対応した輪郭形状データを抽出する輪郭抽出部12、抽出した各輪郭形状データに対して中心軸変換処理を行って点集合で表現した中心軸データを抽出する中心軸抽出部13、抽出した複数の中心軸データを特徴点で関連付けた骨格モデルデータを作成する骨格作成部14を備えている。
(もっと読む)
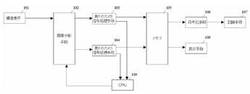
画像撮像システム
【課題】サスペンドモード時においても画像撮像装置としての機能を失わないようにすることができる画像撮像システムを提供する。
【解決手段】CMOSセンサ4が撮影した画像から顔を検出する顔検出LSI5が、CMOSセンサ4が撮影した画像から顔を検出した場合は、ホストコンピュータ及びDSP3に対して低消費電流モードから復帰させる。
(もっと読む)
画像測定装置及び画像測定方法
【課題】自由度の高い画像測定装置及び画像測定方法を提供する。
【解決手段】本発明に係る画像測定装置は、撮像手段と、撮像手段によって被測定対象を撮像して得られた画像情報から被測定対象の座標情報を算出する演算手段とを有し、演算手段は、撮像手段によって被測定対象を撮像して得られた画像情報を、撮像手段に固有の誤差情報によって補正して補正画像情報を得る誤差補正手段と、補正画像情報から被測定対象の座標情報を算出する座標算出手段とを備える。
(もっと読む)
カメラパラメータのキャリブレーション装置及びプログラム
【課題】画像内の特徴点と、実空間上にある特徴点との対応関係を簡易に判定できるカメラパラメータのキャリブレーション装置を提供する。
【解決手段】装置は、複数の特徴点の世界座標を保持する特徴点世界座標保存手段と、撮影画像を表示し、前記撮影画像上の位置を利用者に入力させる入出力手段と、入出力手段により入力された特徴点の画像座標を保存する対応関係保存手段と、対応関係保存手段に保存された特徴点の画像座標と、該特徴点の世界座標との変換を行う射影行列を求める射影行列計算手段と、特徴点世界座標保存手段が保持する特徴点のうち、少なくとも、対応関係保存手段に保持されていない特徴点について、射影行列計算手段が求めた射影行列に基づき画像座標を求める画像座標計算手段とを備えている。
(もっと読む)
画像形成装置、画像形成方法および画像形成プログラム
【課題】 カラー原稿をモノクロプリント出力する際に、モノクロ濃度が非常に近い記号がある場合に、モノクロ濃度レベルを変化させただけでは、プリンタの状態やプリンタ機能(特に濃度調整系機能)により可視性が向上しないケースがある。また、記号のようにドキュメント中で意味を持っている要素に対して、予め決められている色をパターンに置き換えただけでは、文書の意味を考慮して記号の置き換えが行われない。つまりは、ドキュメント作成者の意図が反映されないプリント出力物がプリントされる、という課題が残される。
【解決手段】 本発明において、カラー画像データのモノクロ出力時に可視性が低下する要素に対して、ドキュメントの作成者の意図をできるだけ崩さずに可視性を向上させることが可能になる。
(もっと読む)
色変換テーブル作成方法、色変換テーブル作成プログラム、印刷装置
【課題】第一のデーターと第二のデーターとの対応関係を規定する色変換テーブルを適切に作成する。
【解決手段】所定の第一のデーターと、インク量セットを示す第二のデーターとを機器独立色空間の値に変換して、各データー間の対応関係規定する色変換テーブルを作成するのに際し、Cellar-YNSNモデルをもとに前記第二のデーターの分光反射率を予測し、前記予測された分光反射率から前記機器独立色空間の値を算出する色変換テーブル作成方法であって、前記Cellar−YNSNモデルにより使用されるインクの被覆率とインク量との関係を示す実効面積率をゲイン量に変換し、変換後の前記ゲイン量に対して平滑化処理を施し、前記平滑化後のゲイン量を前記実効面積率に逆変換する平滑化処理工程と、前記平滑化後の実効面積率を用いて、前記第二のデーターの分光反射率を予測し、前記色変換テーブルを作成する色変換テーブル作成工程と、を有する。
(もっと読む)
光軸移動量の算出方法および光軸移動量の算出装置
【課題】レンズを有するカメラを用いた立体画像撮影において、ズーム時の各レンズの光軸の移動量を算出して補正する。
【解決手段】光学ズームレンズを有するカメラの光軸の移動量の算出方法であって、光学ズームの所定レベルでテスト画像を取得し、上記テスト画像の少なくとも一部にデジタルズームを適用し、上記デジタルズームされたテスト画像において複数のテスト点を選択し、光学ズームレベルを所定量だけ変更し、かつデジタルズームレベルを変更し、異なるズームレベルでテスト画像を取得し、デジタルズームされたテスト画像を分析し、上記異なるズームレベルでデジタルズームされたテスト画像の少なくとも一部から上記複数のテスト位置のうちの2つを検索し、上記テスト点の位置を、上記光学ズームされたテスト画像内の対応の点に変換し、テスト画像内の対応のテスト点間の位置の差に基づいて上記光軸の移動量を算出する算出方法が提供される。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム
【課題】不確実で非同期な入力情報に基づく情報解析により、ユーザ位置や識別情報、発話者情報などを生成する構成を実現する。
【解決手段】画像情報や音声情報に基づいてユーザの推定位置および推定識別データを含むイベント情報を入力し、入力イベント情報に基づいて、各ユーザの位置およびユーザ識別情報を含むターゲット情報と、イベント発生源の確率値を示すシグナル情報を生成する情報統合処理部を有し、情報統合処理部は、識別器を備えた発話源確率算出部を有し、該発話源確率算出部において識別器を用いて入力情報に基づく発話源確率を算出する。例えば、ユーザ位置情報、ユーザ識別情報、口唇動作情報の対数尤度比を算出して、イベント発生源の確率値を示すシグナル情報を生成する。
(もっと読む)
81 - 100 / 763
[ Back to top ]