
Fターム[5B057DB09]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 多値 (10,652)
Fターム[5B057DB09]に分類される特許
341 - 360 / 10,652
撮像装置および距離情報取得方法
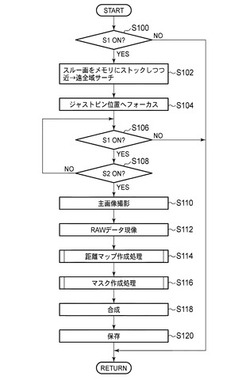
【課題】撮影画像各部における被写体までの距離を正確に把握し、距離に基づきぼかし処理を施す。
【解決手段】測光スイッチS1がオンされると(S100)、レンズを駆動し複数の位置に焦点を合せながら各位置でのスルー画像をメモリに記憶する(S102)。AF処理における合焦位置にフォーカス(S104)する。レリーズスイッチS2がオンされると同合焦位置で主画像の撮影を行う。記憶された複数のスルー画像の被写体までの距離情報を把握し、距離マップを作成するとともに、距離マップに手ブレの大きさ応じた大きさのノイズ除去用のフィルタを施す(S114)。フィルタを施した後の距離マップに基づきマスクを作成し(S116)、被写体までの距離に応じたぼかし処理を施す(S118)。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム

【課題】簡便かつ高速に断面画像の評価を行うことが可能な画像処理装置を提供する。
【解決手段】生体の断面を示す画像である1以上の断面画像が格納される断面画像格納部11と、断面画像について、複数の不連続な領域を有する関心領域を1以上設定する関心領域設定部13と、各関心領域ごとに、各関心領域を評価するための値である評価値を取得する評価値取得部16と、評価値取得部16が取得した評価値を出力する評価値出力部17とを備えた。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】色境界の影響による劣化を補正することができる画像処理装置を提供する。
【解決手段】色境界抽出部11は、画像の色境界を抽出する。影響値算出部12は、色境界が画素に及ぼす影響の大きさを示す影響値を算出する。係数設定部13は、演算部14で畳み込み演算の対象とする画素を注目画素とし、その注目画素を含む色境界で分離された領域の画素に対応する畳み込み演算のための係数を、影響値が大きいほど係数を小さく、影響値が小さいほど係数を大きく設定する。演算部14は、係数設定部13により設定された係数を係数の総和で除算して正規化し、正規化された係数を用いて畳み込み演算を行う。
(もっと読む)
超音波データ処理装置
【課題】トレースラインの形成においてユーザ操作を支援する装置を提供する。
【解決手段】マニュアルトレース用参照断面58内に設定されたトレースガイドTGが破線で示されている。トレースガイドTGは、既に完了した1枚目のマニュアルトレースに基づいた立体的な輪郭情報から得られる。そこで、ユーザは、2枚目のマニュアルトレース用参照断面58に対して、トレースガイドTGを参照しつつ、そのマニュアルトレース用参照断面58内の対象組織の断層画像を確認しながら、対象組織の輪郭に対応したトレースラインTLを描画する。ユーザは、トレースラインTLを全て描画してもよいし、トレースガイドTGの一部をそのままトレースラインTLとして残りの一部を修正してトレースラインTLとしてもよいし、トレースガイドTGをそのままトレースラインTLとしてもよい。
(もっと読む)
画像処理装置、画像表示装置、画像処理方法、コンピュータプログラム及び記憶媒体
【課題】ノイズの低減とディテイルの復元とを両立した画像処理が可能な画像処理装置を提供する。
【解決手段】ノイズ処理部12は、第1ノイズ低減処理部16と、ノイズ推定処理部18と、ディテイル強調処理部19とを備える。第1ノイズ低減処理部16は、ノイズ低減の対象フレーム画像と比較フレーム画像との間で相関が小さい画素を、対象フレーム画像のノイズと見做し、当該ノイズを抑制する第1ノイズ低減処理を施して、ノイズ低減画像を生成する。ノイズ推定処理部18は、対象フレーム画像とノイズ低減画像とを対応画素毎に比較した結果から、対象フレーム画像の各画素のノイズ強度を算出し、当該ノイズ強度に基づき対象フレーム画像の各画素についてノイズである可能性を判定するノイズ推定処理を実行する。ディテイル強調処理部19は、ノイズ低減画像の画素毎に、ノイズ推定処理の結果を反映させた強調処理を施し、出力画像を生成する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】監視カメラに対する妨害行為を検出できるようにする。
【解決手段】画像の画像データを取得し、取得された画像をN(N>1)個のブロックに分割し、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックを、更新対象のブロックとして順次指定し、指定されたM個のブロックの画像データに所定のフィルタによるフィルタリングを施し、フィルタリング結果が、所定の値より大きい画素をカウントし、カウントされた画素の数と所定の値を比較することで、ブロックに異常があるか否かを判定し、異常があると判定された画像内のブロック数と所定の値を比較することで、妨害が発生したか否かが判定される。本技術は、例えば、監視システムに適用できる。
(もっと読む)
撮像装置および距離情報取得方法
【課題】撮影画像内の各領域に対する被写体までの距離を適正に把握する。
【解決手段】測光スイッチS1がオンされると(S100)、レンズを駆動し複数の位置に焦点を合せながら各位置でのスルー画像をメモリに記憶する(S102)。AF処理における合焦位置にフォーカス(S104)する。レリーズスイッチS2がオンされると同合焦位置で主画像の撮影を行う。記憶された複数のスルー画像を用いて撮影画像の各領域毎に被写体までの距離情報を把握し、距離マップを作成する(S114)。距離マップに基づきマスクを作成し(S116)、被写体までの距離に応じたぼかし処理を施す(S118)。
(もっと読む)
目視対象物判定装置、目視対象物判定方法および目視対象物判定プログラム
【課題】目視者の目視する対象物を正確に判定すること。
【解決手段】目視者1の画像データを基にして、目視者1の視線1aを検出し、視線1aの先の視点位置1bを算出する。目視対象物判定装置100は、表示装置10に表示される対象物10A〜10Cの特徴を取得する。目視対象物判定装置100は、目視者の視点位置1bおよび対象物10A〜10Cの距離と、各対象物10A〜10Cの特徴とを基にして、各対象物が目視者に目視されているか否かを判定する。
(もっと読む)
車両検出装置
【課題】複数の映像間で対応をとる特徴点を定めて位置合わせ基準を鮮明にでき、車両の検出精度を向上させる。
【解決手段】実施形態の車両検出装置は、線分成分抽出手段、多角形近似手段及び計測手段を備えている。前記線分成分抽出手段は、左右の撮影画像毎に、当該撮影画像に含まれる前記車両のフロントガラス領域と車体との境界を示す複数の線分成分を抽出する。前記多角形近似手段は、前記左右の撮影画像毎に、当該抽出された複数の線分成分の幾つかを用いて閉ループを構成する多角形近似を行う。前記計測手段は、前記左右の撮影画像毎に前記閉ループを構成する線分成分を当該左右の撮影画像間で互いに位置合わせし、当該位置合わせした線分成分間の座標情報と、左右の撮影画像を撮影した撮影位置を示す撮影位置情報とに基づいて、前記閉ループの位置を前記車両の位置として計測する。
(もっと読む)
3次元測定装置、3次元測定方法及びプログラム
【課題】測定対象物が明るさ(色)の異なる複数の領域を有している場合に、適切にその測定対象物を3次元測定することができる3次元測定装置等の技術を提供すること。
【解決手段】本技術の一形態に係る3次元測定装置は、投影部と、撮像部と、制御部とを具備する。前記投影部は、照度を変化可能な照明を有し、前記照明からの光により測定対象物に縞を投影する。前記制御部は、前記撮像部により前記測定対象物の画像を撮像させ、撮像された前記測定対象物の画像から輝度値を取得し、取得された前記輝度値に基づいて、前記測定対象物に対して複数の検査ブロックを割り当て、割り当てられた前記検査ブロック毎に、前記照明の測定照度を決定し、決定された前記測定照度で、それぞれ、前記投影部により前記検査ブロックに対して縞を投影し、前記縞が投影された前記検査ブロックの縞画像を前記撮像部により撮像し、撮像された前記縞画像に基づいて前記測定対象物を3次元測定する。
(もっと読む)
画像処理装置
【課題】 平均濃度保存処理を、高速、高スループットで実行可能な画像処理装置を提供する。
【解決手段】 隣接する2つの画素データを同じクロックで取得し、注目画素直前の量子化結果が確定する前に平均濃度値を想定することにより、各画素データに対するNの2乗個の平均濃度算出処理をあらかじめ行う。注目画素直前の量子化結果が確定したのち、確定した量子化結果を基づき各画素データに対する平均濃度値を選択することにより、平均濃度保存処理に用いる平均濃度値算出に必要な処理時間を削減し、隣接する2つの画素データに対する平均濃度保存処理を行うことを可能にする。
(もっと読む)
画像処理装置、画像処理方法及び撮像装置
【課題】ずれ量算出にかかる処理時間を短縮することのできる画像処理装置を提供する。
【解決手段】異なる位置から撮影され、複数の画素が2次元の行列状に配列された右眼画像PR及び左眼画像PLが格納されるメモリ51と、N行目の各画素に対応する切り出しブロックBRを右眼画像PRから切り出し、左眼画像PLの処理領域の全水平領域から比較ブロックBLを行方向に1画素ずつ移動させて切り出すメモリ制御部53を有する。また、切り出された各比較ブロックBLと切り出しブロックBRとを比較して輝度信号の差分絶対値和を算出するSAD演算部54と、各切り出しブロックBR毎に差分絶対値和の最小値に基づいてずれ量を算出する比較器55を有する。さらに、N+1行目の画素に対するずれ量算出処理の際に、N行目において算出された差分絶対値和に基づいて比較ブロックBLの処理領域内での移動範囲を絞るように設定する演算制御部56を有する。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】自然な見え方の合成画像を提示可能な画像処理装置、方法、及びプログラムを提供する。
【解決手段】画像処理装置は、第1算出手段と、選択手段と、抽出手段と、第2算出手段と、決定手段と、生成手段と、を備える。第1算出手段は、被写体を含む第1画像から前記被写体の姿勢情報を算出する。選択手段は、衣服を含む複数の第2画像から、前記姿勢情報に対応する第2画像を選択する。抽出手段は、前記第1画像の第1輪郭から前記被写体の第1特徴を抽出し、前記第2画像の第2輪郭から第2特徴を抽出する。第2算出手段は、前記第1特徴と前記第2特徴との第1ずれ量を算出する。決定手段は、前記第1ずれ量が大きいほど高い透過度を決定する。生成手段は、前記第1画像と、前記透過度に変更した前記第2画像と、を合成した合成画像を生成する。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
画像処理装置および画像処理方法
【課題】背景領域との濃度差が小さく、線領域の幅が数ドットしかない、低濃度の細線の途切れを緩和し、細線の再現性を向上する画像処理装置および画像処理方法を提供する。
【解決手段】記録媒体116上に記録材のドットからなる画像を形成する画像形成装置1において、入力されたデータをM(Mは1以上の整数)値化する第1のハーフトーン処理手段、画像形成装置1が備えた記録材の色へ色分解する色分解処理手段、前記色分解処理により算出された各色材値をN(Nは1以上の整数)値化する第2のハーフトーン処理手段、前記2つハーフトーン処理の組み合わせを選択するハーフトーン処理組み合わせ選択手段を有する。
(もっと読む)
画像形成システム、画像形成装置および画像形成方法
【課題】異なる記録モードが設定された複数の画像でネスティングする場合であっても、インデックスとマスクの組み合わせ及び相対位置関係を崩すことなく、良好な画像を出力することが可能な画像形成システムを提供する。
【解決手段】複数の印刷ジョブデータのそれぞれについて、ネスティングした際のマスクパターンの記録媒体上での開始位置を、個々の印刷ジョブデータに付随された画像データの開始位置情報に基づいて、インデックスパターンの開始位置と一致するように設定する。
(もっと読む)
画像処理装置、画像処理方法、画像処理システム
【課題】撮像画像の付加価値の向上
【解決手段】ユーザーの頭部に装着され、ユーザーの視界方向を被写体方向として画像撮像を行う撮像手段と、撮像手段での撮像により撮像画像データを取得する撮像画像取得手段と、挿入画像データを記憶する挿入画像記憶手段と、撮像画像取得手段により取得した撮像画像データにおける被写体画像の画像解析処理を行って、該被写体画像内で、入換領域を設定する入換領域設定手段と、入換領域内の全部又は一部の画素データを、挿入画像記憶手段から読み出した挿入画像データに置き換える処理を行って入換画像データを生成する入換画像生成手段と、入換画像生成手段で生成された上記入換画像データについて出力処理を行う画像出力手段と、ユーザーの頭部に装着され、画像出力手段の出力処理で出力された上記入換画像データについて表示出力を行う表示手段と、を備える。
(もっと読む)
画像処理装置及び画像処理方法
【課題】細線化とスムージングを同時に実現するうえで、細線化処理とスムージング処理を独立化する。
【解決手段】画像処理装置1は、画像データにスムージング処理を施すスムージング処理部2と、画像データに細線化処理を施す細線化処理部3と、画像データの各画素についてエッジ方向を判定するエッジ方向判定部4と、細線化処理とスムージング処理が同時に実現されたときの各画素の画素値を決定するブレンド処理部5と、を備える。ブレンド処理部5は、注目画素、注目画素の周辺画素の各画素値、スムージング処理による画素値の変化量、細線化処理による画素値の変化量、注目画素について判定されたエッジ方向を用い、注目画素における細線化の有無、スムージングの有無の組み合わせに応じて、細線化処理とスムージング処理が同時に実現されたときの注目画素の画素値を決定する。
(もっと読む)
画像処理装置、画像処理方法、画像処理用プログラム、および、記録媒体
【課題】明るさが連続する画像でも精度よく各画素の明るさを変換する。
【解決手段】原画像から、明るさの変換を行う画素の周りに局所領域32を設定し(S1)明るさに対して連続かつ単調増加であり、明るさの変換の出力上限を決める上限変換関数を設定し、明るさに対して連続かつ単調増加であり、明るさの変換の出力下限を決める下限変換関数を設定し(S3)、変換を行う画素の明るさにおける上限変換関数の値である上限値および下限変換関数の値である下限値を算出し(S7)、局所領域における各画素の明るさに応じて、上限値と下限値との間の値を設定するための比率を算出し(S8)、上限値と下限値と比率とより、明るさの変換を行う画素の変換後の明るさを算出する(S10)。
(もっと読む)
撮像装置
【課題】 システム構成を複雑化させることなく、撮影中の視野を全焦点画像上の適切な位置に表示させることができる撮像装置を提供する。
【解決手段】 カメラの焦点位置を変更する焦点位置変更手段と、焦点位置を変更して取得された2以上の静止画像を合成する全焦点画像生成手段と、全焦点画像、又は静止画像に基づいて抽出される画像を基準画像として当該基準画像とフレーム画像とから特徴量を抽出する特徴量抽出手段と、特徴量の比較によって、基準画像とフレーム画像間の相対位置を判定するライブ位置合わせ手段と、外部からの取込み指示を受け付けた際に、焦点位置の異なる2以上の静止画像を取得する静止画像取得手段と、取得した静止画像を合成することにより全焦点画像生成手段が生成した新たな全焦点画像と、過去に取得した全焦点画像とを連結してモザイク画像を生成するモザイク画像生成手段とを備える。
(もっと読む)
341 - 360 / 10,652
[ Back to top ]