
Fターム[5B057DB09]の内容
画像処理 (340,757) | 分析部 分析画像の特性 (30,351) | 多値 (10,652)
Fターム[5B057DB09]に分類される特許
401 - 420 / 10,652
画像処理装置、撮像システム、画像処理システム
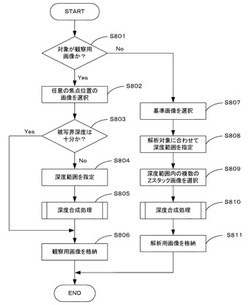
【課題】デジタル画像を利用した検体観察において、検体の奥行き方向の情報を維持し、且つコンピュータによる画像解析処理に適した画像を生成するための技術を提供する。
【解決手段】画像処理装置が、構造物を含む検体を焦点位置を変えながら撮像することにより得られた複数の原画像を取得する画像取得手段と、前記複数の原画像をもとに、原画像よりも構造物の像のボケが低減された第1の画像を生成する画像生成手段と、前記第1の画像に対し画像解析処理を適用することによって、前記第1の画像に含まれる構造物に関する情報を取得する解析手段と、を備える。前記画像生成手段は、前記検体から得られた前記複数の原画像の内から、前記検体の厚さよりも小さい深度範囲内に焦点位置が含まれる原画像を選択し、前記選択された原画像を用いて前記第1の画像を生成する。
(もっと読む)
画像処理装置およびその方法

【課題】 簡易な方法によりスクリーン処理を適切に補正し、良好なハーフトーン処理結果を出力する。
【解決手段】 上記課題を解決するために、本発明の画像処理装置は、画像データに対してスクリーン処理により第一の量子化データを生成する第一の量子化手段と、前記画像データの低周波成分と前記第一の量子化手段で得られたスクリーン処理後データの低周波成分との差分を算出する差分算出手段と、前記差分に応じて、前記第一の量子化手段による結果または所定値の何れかを出力する出力手段と、前記第一の量子化データと前記差分の和から前記出力手段による出力データを引いた値に対して、前記第一の量子化手段とは異なる方法により量子化し、第二の量子化データを生成する第二の量子化手段と、前記第二の量子化データを前記第一の量子化データに加算する加算手段とを有する。
(もっと読む)
渦巻きばねの形状を算出するための画像処理装置、方法、及びプログラム
【課題】 渦巻きばねの撮影画像から芯線を正確に抽出する。
【解決手段】 画像処理装置は、渦巻きばねを撮影した撮影画像を入力する画像入力手段と、入力された撮影画像から渦巻きばねの輪郭線を抽出する輪郭線抽出手段と、抽出された輪郭線を極座標変換する座標変換手段と、極座標変換された輪郭線に対して、その輪郭線上を一方向に移動しながら一巡したときの「輪郭線の角座標値列(θ1,θ2,・・,θn)」を取得する角座標値列取得手段と、取得された「輪郭線の角座標値列」を用いて、内フック領域及び外フック領域を特定するフック領域特定手段を有している。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】コントラストが低い画像および自己相関が高い画像が対象であっても、高速かつ高精度の対応点の探索が実現され得る技術を提供する。
【解決手段】画像取得部によって第1画像および第2画像が取得され、第1設定部によって第1画像に基準点が設定され、第2設定部によって第2画像に探索基準点が設定される。次に、検出部によって、第1画像において基準点を基準として設けられる基準領域と、第2画像において探索基準点を基準として設けられる参照領域とに係る相関演算の結果に基づき、第2画像において基準点に対応する対応点が検出される。そして、判定部によって、第2画像における探索基準点と対応点との位置関係に基づいて、対応点の信頼度が判定される。
(もっと読む)
焦点に基づく動的シーンの深度再構成のための装置および方法
【課題】動的シーンが、レンズおよびセンサを備えるカメラを用いて、焦点深度を変更しながら動的シーンの焦点スタックを最初に取得することによって、深度および拡張被写界深度ビデオとして再構成される。
【解決手段】焦点スタックのフレーム間のオプティカルフローが求められ、そのオプティカルフローにしたがってフレームをワープして、フレームを位置合わせし、仮想静的焦点スタックを生成する。最終的に、デプス・フロム・デフォーカスを用いて、仮想静的焦点スタックごとの深度マップおよびテクスチャマップが生成され、そのテクスチャマップはEDOF画像に対応する。
(もっと読む)
プレゼンテーションシステム、プレゼンテーション装置およびプログラム
【課題】プレゼンテーションの開始前におけるジェスチャーの誤検出を回避することが可能なプレゼンテーションシステムおよびそれに関連する技術を提供する。
【解決手段】プレゼンテーションシステム100は、操作入力受付部とジェスチャー検出部と配信動作制御部とを備える。操作入力受付部は、プレゼンテーションの開始指示を受け付ける。ジェスチャー検出部は、当該開始指示に応答して、プレゼンテーションの発表者PTのジェスチャーの検出を開始する。配信動作制御部は、ジェスチャーの検出内容に基づいて、プレゼンテーションの発表資料の配信動作を制御する。
(もっと読む)
画像形成装置、画像形成方法、およびプログラム
【課題】高精度の補正が求められる重要色の抽出を、より正確、かつ、より簡易的に実施可能な手段を提供すること。
【解決手段】入力された印刷ジョブを解析し、該印刷ジョブのうちの複数のページで使用される色を抽出する抽出手段と、前記抽出手段で抽出された抽出色のパッチ画像を形成する形成手段と、前記形成手段で形成されたパッチ画像を測定し、前記抽出色における基準値からの色の変動量を判定する判定手段と、前記入力された印刷ジョブを印刷する際に、前記判定手段で判定された色の変動量を用いて前記抽出色を補正する補正手段とを有することを特徴とする画像形成装置とを有する。
(もっと読む)
画像処理装置と画像処理方法およびプログラムと記録媒体
【課題】簡単な構成で容易に画質の改善を行うことができるようにする。
【解決手段】周波数分離部20は、入力画像の縮小と、縮小された入力画像を縮小前の画像サイズに戻して縮小前の入力画像との差分の算出を行い、入力画像を周波数帯域の異なる縮小画像と差分画像に分離する。画像処理部30は、縮小画像と差分画像の少なくとも何れかの画像処理を行う。合成処理部40は、少なくとも一方が画像処理されている縮小画像と差分画像を等しい画像サイズとして合成する。大容量のメモリやバッファを設ける必要がなく、簡単な構成かつ低処理コストで容易に画質の改善を行うことができる。
(もっと読む)
撮像装置、撮像制御方法、及びプログラム
【課題】容易に所望する被写体の表情を撮影可能な撮像装置、撮像制御方法、及びプログラムを提供する。
【解決手段】撮像装置は、撮像部10と、制御部20と、記憶部30と、音声出力部50とを備える。制御部20は、撮像部10により出力された画像データに基づいて、被写体の顔の特徴量を取得する。そして、取得した特徴量と基準特徴量との差分に基づいて、表情評価値を取得する。表情評価値が基準評価値よりも大きいと判別した場合、画像データを記憶部30に記憶させる。表情評価値が基準評価値よりも大きくないと判別した場合、被写体に対しさらに前表情評価値が大きくなる表情を作るように促す旨の音声メッセージを音声出力部50から出力させる。
(もっと読む)
画像処理装置および画像表示システム
【課題】標本の高さ方向が異なる画像において、高さ方向に垂直な平面間の撮像領域のずれを補正して、高精度の全焦点画像および3次元画像を構築することができる画像処理装置および画像表示システムを提供すること。
【解決手段】固定された軸に沿って移動しながら撮像された一群の画像をもとに全焦点画像および/または3次元画像の構築処理を行う画像処理部33であって、一群の画像において、各画像における軸に垂直な平面内のずれの検出を行なう検出部331と、検出部331の検出結果に応じてずれの補正を行う補正部332と、固定された軸に沿って移動して撮像された画像および/または補正部332で補正された画像を含む一群の画像をもとに、全焦点画像および/または3次元画像を構築する画像構築部333と、を備えた。
(もっと読む)
ゲームシステム、プログラム、及び情報記憶媒体
【課題】プレーヤの撮影画像の新たな利用形態を実現すること。
【解決手段】業務用ゲーム装置1300は、イメージセンサモジュール1326を備え、少なくともプレイポジションにいるプレーヤを撮影範囲に含む装置前方画像を撮影できる。また、装置前方画像に写っているプレーヤの顔表情を認識し、その認識結果を用いてゲーム進行及び/又はゲーム演出を制御する。例えば、音楽ゲームの場合、プレイ曲の「サビ」の部分で特定の顔表情をするように提示する「顔表情お題」を行い、「サビ」部分をプレイ中のプレーヤの顔表情が提示された顔表情に適合する場合に特典を付与したり、特別な演出表示を実行する。
(もっと読む)
画像処理装置
【課題】グラフカット法を用いて撮像画像から溶接部に対応する領域を抽出する画像処理装置において、領域の抽出精度の向上を図る。
【解決手段】撮像画像における前景領域および背景領域と推定される推定領域を仮初期領域として撮像画像に対して指定し(S31)、グラフカット法を用いて仮初期領域を基準として撮像画像から溶接部23に対応する仮領域を抽出する(S32、S33、S35)。そして、抽出した仮領域を膨張させた膨張領域を撮像画像から除外した領域を背景領域に対応する背景初期領域とし、かつ、仮領域を収縮させた収縮領域を前景領域に対応する前景初期領域として撮像画像に対して指定し(S34)、グラフカット法を用いて指定した背景初期領域および前景初期領域を基準として撮像画像から前景領域を抽出する(S36)。
(もっと読む)
駐車枠の認識装置、駐車枠の認識方法、及び、プログラム
【課題】駐車場に描かれた駐車枠12の形状を車両へ送信する駐車場側の通信設備を不要とし、駐車枠の認識が可能な駐車場を増やして有効に駐車枠を認識する。
【解決手段】駐車枠の認識装置2が、複数の駐車枠の形状のいずれかをユーザの操作に基づいて選択する。そして、選択した駐車枠の形状に基づいて、車両外部を示す画像中の駐車枠12を認識する。駐車枠の認識装置2が駐車枠12を認識すると、駐車支援システム100は駐車枠12で区画される駐車領域PAへ車両1を誘導し、駐車支援を行う。したがって、駐車場に描かれた駐車枠12の形状を車両へ送信する駐車場側の通信設備を不要とすることができる。かかる通信設備を不要とすることにより、駐車枠の認識が可能な駐車場を増やし、有効に駐車枠を認識することができる。
(もっと読む)
被写体追跡装置及びその制御方法
【課題】 基準画像と入力画像との相関度に基づく被写体追跡を行う被写体追跡装置において、被写体の見えが変化する状況における被写体追跡の精度を向上させる。
【解決手段】 入力画像中の領域のうち、登録された第1および第2の基準画像の各々と最大相関度を有する領域を求める。そして第1の基準画像についての最大相関度と第2の基準画像についての最大相関度とを比較して、特定の被写体の領域を最大相関度を有する領域の中から判定する。そして、特定の被写体の領域を判定すると、判定した特定の被写体の領域に基づいて第2の基準画像を更新する一方、第1の基準画像は、更新しない。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】多重解像度戦略を用いた対応点探索処理において信頼度が局所的に悪化した場合における総合信頼度を改善する。
【解決手段】画像処理装置は、複数の階層にわって複数の解像度で階層的に表現された複数の基準画像と複数の参照画像とを取得する取得部と、注目点を複数の基準画像にそれぞれ設定する設定部と、注目基準画像の注目点に対応した注目参照画像の対応点を探索する対応点探索処理を各階層において逐次行なう探索部と、各階層における対応点探索処理の結果に関する各信頼度を決定する決定部と、各信頼度の全体的な状況を表現した基準値を、互いに隣接した各階層組みのそれぞれの間にわたる各信頼度についての各信頼度変化のうち一部の信頼度変化を他の信頼度変化よりも強調した補正値を用いて補正することにより、各信頼度を総合した総合信頼度を算出する演算部とを備える。
(もっと読む)
色処理装置およびその方法
【課題】 局所的に急激な変化が起きない滑らかな均等色知覚空間を短時間に作成する。
【解決手段】 基準色空間取得部104は、色空間を表すデータを入力する。データ取得部103は、複数の色領域における視覚均等性を表すデータセットを取得する。制御点設定部105は、色空間において、データセットが対応する複数の色領域を包含する制御領域を示す制御点を設定する。最適化部106は、制御点とデータセットを用いて、色空間を縮小するように補正する。
(もっと読む)
車両周辺監視装置
【課題】カメラとレーダ装置の組み合わせにより物体の実空間位置を算出するときに、車両と物体間の距離の誤検出により、不適切な実空間位置の算出がなされることを防止した車両周辺監視装置を提供する。
【解決手段】物体距離検出部21によりレーダ装置12の測距データから検出された物体をカメラの撮像画像に投影して、該物体の画像部分を検出する画像部分検出部22と、物体距離検出部21による検出距離に基づいて、物体の実空間位置を算出する実空間位置算出部23と、前記検出範囲内に存在する格子フェンスを検出する半透過物体検出部25と、カメラ11の撮像方向で、格子フェンスと重なる位置に存在する物体については、実空間位置算出部23による実空間位置の算出を禁止する実空間位置信頼性判定部24とを備える。
(もっと読む)
画像処理装置及び撮像装置
【課題】現在コマの補正量算出において過去コマの補正量を参照する際に、過去コマと現在コマが異なる条件で撮影されたような場合においても好ましい補正を行えるようにする。
【解決手段】画像の撮影時における撮影時情報を取得する撮影時情報取得部と、撮影画像における画像特徴量から撮影画像の補正量を算出する補正量算出部と、撮影時情報に基づいて補正量を修正する修正部と、修正した後の補正量を撮影画像に適用して補正処理を行う補正処理部と、修正部により修正する前の補正量を記録する補正量記録部と、現在の画像について補正処理を行う時に、過去の画像についての修正する前の補正量を取得する補正量取得部とを備え、修正部は、現在の画像について補正処理を行う時に、過去の画像についての修正する前の補正量と、現在の画像の撮影時における撮影時情報とに基づいて、補正量を修正し、補正処理部は、修正された補正量を現在の撮影画像に適用して補正処理を行う。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
画像処理装置、画像処理方法、及びコンピュータプログラム
【課題】被写体のそれぞれに合うようにガンマ曲線を変更できるようにする。
【解決手段】入力した画像を4つの第1の分割領域に分割し、4つの第1の分割領域の画像のそれぞれについて個別にガンマ補正カーブの再変更の有無を判断する。例えば、第1の分割領域の画像のガンマ補正カーブ501を変更する場合には、変更後のガンマ補正カーブ502の入力輝度変化範囲R1と、当該第1の分割領域の境界部分輝度分布701との重なりの有無を判断する。重なりLがある場合には、その重なりLがなくなるように、ガンマ補正カーブ502をガンマ補正カーブ702に再変更する。そして、この再変更後のガンマ補正カーブ702を第1の分割領域の画像のガンマ補正カーブとする。
(もっと読む)
401 - 420 / 10,652
[ Back to top ]