
Fターム[5B057DC07]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 特徴の抽出 (25,407) | 幾何学量の算出 (10,741) | 特徴点 (2,407) | 始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC07]に分類される特許
101 - 120 / 396
3次元データ生成装置、3次元データ生成方法およびプログラム
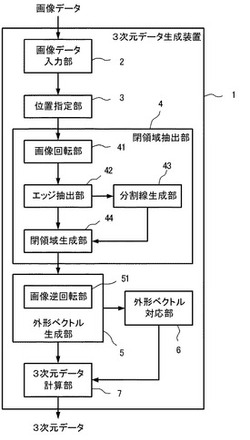
【課題】ステレオ画像から比較的簡易に2枚の画像の対応点を求める3次元データ生成装置、3次元データ生成方法およびプログラムを提供する。
【解決手段】画像データ入力部2は、異なる位置から所定の領域を撮影した2つの画像の画像データを取得する。位置指定部3は、2つの画像データのそれぞれの画像で、1つの構造物の領域に含まれる画像上の指定点を取得する。閉領域抽出部4は、2つの画像データのそれぞれの画像で指定点を含み、指定点との色の差が所定の範囲であって連続する画素の集合である閉領域を抽出する。外形ベクトル生成部5は、2つの画像のそれぞれで抽出した閉領域の輪郭に沿って一巡する外形ベクトルを抽出する。3次元データ計算部7は、2つの画像データのそれぞれの外形ベクトルが同じ構造物の外形に対応するとみなして、2つの画像データからその構造物の外形の3次元の位置座標を算出する。
(もっと読む)
画像認識装置および操作判定方法並びにプログラム

【課題】的確な操作の判定を可能にすること。
【解決手段】画像読取部301においてビデオカメラ201で撮影されたデータを読取り(S401)、そのデータから操作者の像を、画像抽出部302により抽出する(S402)。このような準備の結果、抽出した操作者102の画像に基づいて仮想操作面および操作領域を形成する(S403)。大人の操作者810については、身長(視線の位置)や腕の長さを考慮して操作領域811のように形成することができるし、子供の操作者820の場合、身長もより低くなり、腕も短くなるので、これにあわせて操作領域821を設定することができる。
(もっと読む)
車両の速度制御装置
【課題】簡素化された道路データベースを用いて、車両前方にあるカーブを通過する際に運転者に与える違和感が小さい減速制御が達成できる車両の速度制御装置の提供。
【解決手段】道路データベースにて、道路のカーブ内における屈曲度一定区間Cr#を定義するため、屈曲度一定区間Cr#の端点位置である第1位置Px#、及び、屈曲度一定区間Cr#の一定屈曲度Rm#が予め記憶されている。車両位置Pvhに基づいて、車両前方における車両が走行している道路上に存在する屈曲度一定区間Cr#のうちで車両に対して最も近い位置に存在する基準屈曲度一定区間が決定される。車両の実車速Vxa、基準屈曲度一定区間Cr#の第1位置Px#、及び、基準屈曲度一定区間Cr#の一定屈曲度Rm#に基づいて、運転者による加減速操作がなされない場合においても、車両がカーブを適正に通過するためにカーブ減速制御が実行される。
(もっと読む)
道路形状認識装置
【課題】車両の進行方向前方に存在する道路の道路形状を正確に認識することができる道路形状認識装置を提供する。
【解決手段】道路形状認識装置1は、車両の進行方向前側を撮像した画像に基づいて道路の道路領域を検出し、その道路領域に基づいて道路の形状を推定する。これにより、道路形状を近傍から遠方まで正確に認識することができる。
(もっと読む)
ロボット制御システム及びロボット制御プログラム
【課題】物体の搬送作業を行えるロボットを好適に制御できるロボット制御システムを、提供する。
【解決手段】カメラ画像が表示されているタッチスクリーン上の或る範囲を指定する操作が行われた場合、カメラ画像に対する画像セグメンテーション処理結果を利用して、カメラ画像中の、ユーザが指定した範囲内に所定割合以上の部分が含まれているセグメント群からなる画像を探索し、探索した画像を、搬送対象物の画像として特定(S102)し、特定した画像に基づき搬送対象物をロボットに搬送させる制御処理(S110)を行う。
(もっと読む)
画像生成装置、画像生成方法及び画像生成プログラム
【課題】2枚の時系列画像から物理的な性質を保持しながら不自然な画像のボヤケを抑制した画像を生成することを課題とする。
【解決手段】予測計算部14により、拡散係数を変数に有する移流拡散方程式と、密度及び粘性係数を変数に有するナビエ・ストークス方程式とを用いる。また、最適化計算部15により、次時刻の輝度値及び速度ベクトルから次時刻の画像が有するエネルギーを計算し、このエネルギーと初期のエネルギーとの最小になるまで拡散係数と密度と粘性係数とを可変しながら次時刻の画像を最適化する。さらに、最適化計算部15により、波数と波数エネルギーとの関係がガンマ分布に近似するよう次時刻の画像を更に最適化する。
(もっと読む)
画像処理装置、撮像装置、画像処理方法
【課題】 画像中の顔の表情やその顔が誰のものであるかを判別することで、適切な画像を記録する。
【解決手段】 画像を入力し(S201)、入力された画像を一時的に保持し、保持された画像から顔を検出し(S202)、顔が検出された場合に顔の表情を判別し(S204)、判別された顔の表情が特定の表情である場合に、一時的に保持された当該顔が検出された画像を記録する(S205)。
(もっと読む)
原稿方向の検出方法及び装置
【課題】関連技術に要求された大量の計算量による長い遅延時間や高コストの問題が解消され、計算量が小さくなり、原稿方向の正確な検出を高速に行うことができ、正確な読み方向を得やすい効果が実現される。
【解決手段】本発明は、原稿を走査して原稿の文字の筆画図を得るステップと、筆画図により文字の十字特徴を抽出するステップと、十字特徴により原稿方向を検出するステップとを含む原稿方向の検出方法を提供する。また、本発明は、原稿を走査して原稿の文字の筆画図を得る走査モジュールと、筆画図により文字の十字特徴を抽出する抽出モジュールと、十字特徴により原稿方向を検出する検出モジュールとを含む原稿方向の検出装置も提供する。
(もっと読む)
車両検知装置、交通情報提供システム、車両検知方法および車両検知プログラム
【課題】各車両の位置をドライバーに通知して交通事故を抑止する。
【解決手段】画像センサデータ処理装置120は道路画像191から検出した各走行車両101の情報を画像センサデータ192として情報判定装置200に出力する。情報判定装置200は画像センサデータ192に基づいて走行車両101の位置を算出する。情報判定装置200は走行車両101の位置が道路外であれば道路内の位置に補正し、複数の候補のうち最も停止線102に近い位置を選択する。情報判定装置200は各走行車両101の位置を示すメッシュ地図データ293を交通情報提供装置130に出力する。交通情報提供装置130はメッシュ地図データ293に基づいて交通情報193を生成し、例えばDSRC路側機111を介して交通情報193を各走行車両101に提供する。なお、路側も車載側も通信媒体はDSRCに限らず光ビーコン、携帯電話、その他の新メディアであっても良い。
(もっと読む)
画像切出装置
【課題】書画台に書類全体が載置されていなくても書類全体を表す画像を切り出すことができる画像切出装置を提供すること。
【解決手段】書画台に載置された書類が撮影された映像に基づいて、この書類の輪郭のうち書画台に載置された1辺を検出する載置辺検出部20と、検出された1辺に対する対辺の位置を推定する対辺推定部21と、検出された1辺の位置および推定された対辺の位置に基づいて、映像から書類画像を切り出す画像切出部22と、切り出した複数の書類画像が同一の内容を表す場合にこの内容を表す書類画像を原画像として記憶する原画像記憶部24と、各書類画像の変化に応じて、変化後の各書類画像と原画像との差分画像を原画像に合成して1つの書類画像を生成する画像合成部26とを備える。
(もっと読む)
画像生成装置、プリントシール製造方法、プログラム及び記憶媒体
【課題】肌の色の補正とは違った方法で被写体の目の部分に効果的な画像処理を施すこと。
【解決手段】シールプリント機において、カメラを用いてユーザの顔画像が撮影される。そして、撮影された顔画像の中からユーザの目を検出する処理が行われ、検出された目に対して睫毛テクスチャをフィッティングさせるフィッティング処理が行われることで、撮影画像中のユーザの睫毛描画位置が特定される。そして、特定された睫毛描画位置に所定の睫毛画像色が着色されることで、睫毛画像が描画された表示用画像が生成されて、ディスプレイ1002に表示される。
(もっと読む)
撮像装置、画像処理プログラム、および撮像方法
【課題】被写体を素早く、かつ正確に検出する撮像装置を提供する。
【解決手段】画像を取得し、画像の中に基づいて低解像度画像を取得し、低解像度画像に対して被写体候補を検出する。そして、低解像度画像が被写体候補である場合に、低解像度画像よりも高解像度の高解像度画像に対して被写体を検出する。
(もっと読む)
電気鉄道保守用車両位置測定装置
【課題】車両の走行位置と通過時刻との関係を高精度に特定することを可能とした電気鉄道保守用車両位置測定装置を提供する。
【解決手段】車両の屋根上に設置されてハンガを撮影するラインセンサカメラ2と、ラインセンサカメラ2によって取得した画像の解析を行う画像処理部とを備える電気鉄道保守用車両位置測定装置において、画像処理部を、ラインセンサカメラ2によって撮影された画像信号を時系列的に並べてなるラインセンサ画像を作成するラインセンサ画像作成部31aと、ラインセンサ画像上の点列から直線を検出するハフ変換部31bと、ハフ変換部31bによって検出された直線のうち予め設定する基準方向に対する角度が所定の範囲内にある直線をハンガとして抽出するハンガ認識部31cと、ハンガ認識部31cにおいて検出されたハンガが撮影された時刻を記録する時刻記録部31dとから構成した。
(もっと読む)
走行支援装置および走行支援方法
【課題】自車両が走行する走路に、物体が飛び出す可能性を適切に算出することができる走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段10と、撮像した画像の情報に基づいて、画像中で移動した物体のエッジ成分を抽出する抽出手段と、画像中の所定領域において、抽出手段により抽出されたエッジ成分に対応する画素が複数連続してなる画素列を構成する各画素のうち、高さ方向において最も下側に位置する画素の位置を最下点位置として検出する最下点位置検出手段と、車両の進行方向に沿って、最下点位置同士を結ぶ直線を、自車両が走行する走路の境界線として検出する境界線検出手段と、を備える走行支援装置において、最下点位置に基づいて、自車両の進行方向の空間と交差する空間である交差空間を検出する交差空間検出手段と、検出された交差空間に基づいて、自車両が走行する走路上に、物体が飛び出す可能性を算出する算出手段と、を有することを特徴とする走行支援装置。
(もっと読む)
遅延頂点シェーディングを用いたグラフィックス処理ユニット
遅延頂点シェーディングを使用するグラフィックス処理ユニット(GPU)を用いてグラフィックス画像を処理するための技法について説明する。例示的な方法は、グラフィックス処理ユニット(GPU)の処理パイプライン内で、画像ジオメトリ内の各プリミティブの頂点の頂点座標を生成することと(ここで、頂点座標は、頂点の各々のロケーションとパースペクティブ・パラメータとを含み、画像ジオメトリは、グラフィックス画像を表す)、GPUの処理パイプライン内で、頂点座標に基づいて画像ジオメトリ内の可視プリミティブを識別することと、可視プリミティブを識別することに応答して、グラフィックス画像の表面特性を判定するために、GPUの処理パイプライン内で、可視プリミティブの頂点のみについて頂点アトリビュートを生成することを含む。 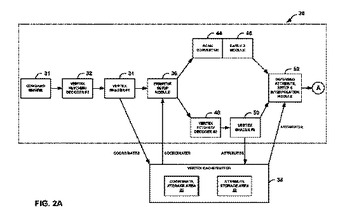 (もっと読む)
(もっと読む)
車線検出装置
【課題】撮像された画像中から自車両の走行路に標示された車線を的確に検出することが可能な車線検出装置を提供する。
【解決手段】車線検出装置1は、自車両MCの周囲を撮像して画像Tを取得する撮像手段2と、画像T中の隣接する画素pの輝度差ΔDが閾値ΔDth内である画素p同士を1つのグループgとして統合する統合手段6と、平均輝度Dave等が所定の閾値の範囲内であるグループgを道路面グループGとして検出する道路面検出手段7と、画像Tの道路面グループG以外の画像部分を探索し、道路面グループGとの輝度の差δDが閾値δDth1以上であり、かつ、隣接する画素pとの輝度差ΔDが閾値ΔDth1以上である画素pを車線候補点cl、crとして検出する車線候補点検出手段8と、検出された車線候補点cl、crに基づいて画像T中に自車両の走行路に標示された車線LL、LRを検出する車線検出手段9とを備える。
(もっと読む)
情報抽出装置、情報抽出方法、情報抽出プログラム、及び記憶媒体
【課題】パターンの並びが歪んだ場合であっても、パターン一つひとつの位置を簡易かつ正確に特定して、埋め込まれた情報を抽出する。
【解決手段】読取制御部34が、複数種別のパターンを格子状に印刷することで情報が埋め込まれた印刷物の画像データを取得し、線分列算出部36が、画像データの中の略垂直方向のパターン列を線分で結んだ略垂直線分列を複数算出するとともに、略水平方向のパターン列を線分で結んだ略水平線分列を複数算出し、探索部38が、略垂直線分列と略水平線分列との組み合わせ毎に、当該略垂直線分列及び当該略水平線分列の中から、互いに交差する略垂直線分及び略水平線分を探索し、交点算出部40が、探索された略垂直線分と略水平線分との交点をパターンの位置として算出し、抽出部42が、算出された位置のパターンの種別を識別し、印刷物に埋め込まれた情報を抽出する。
(もっと読む)
駐車支援装置、駐車支援方法及び駐車支援プログラム
【課題】 負荷の少ない方法で確実に停車すべき位置を認識できる駐車支援装置を提供する。
【解決手段】 駐車支援装置100は、車両後方を撮影して画像を取得するカメラ201と、車両後方に存在する障害物を検出し、車両後端から障害物までの距離を求める障害物検出部202と、車速を検出する車速センサ203と、障害物までの距離と車速とから、車両からその進行方向に伸びるガイド線を、障害物の手前位置を示す情報を付与したガイド線に修正するガイド線制御部205と、取得した画像と修正したガイド線とを合成し合成画像を作成する画像処理部207と、合成画像を表示するモニタ209を備える。
(もっと読む)
位置姿勢推定方法および装置
【課題】3次元モデルデータの表面情報を実写画像を用いて更新するにおいて、不適格な実写画像を用いた更新を防止し、安定した位置姿勢の推定を可能にする。
【解決手段】撮像装置によって観察対象物体を撮像して得られた実写画像を取得するとともに、観察対象物体の形状及び表面情報を表す3次元モデルデータと撮像装置の位置姿勢情報とに基づいて3次元モデルを画像平面上に描画することにより描画画像を生成する。そして、生成された描画画像と、実写画像における観察対象物体の画像との対応を検出することにより、撮像装置と観察対象物体の相対的な位置姿勢を算出する。また、算出された位置姿勢に基づいて実写画像における観察対象物体の画像情報を3次元モデルデータの表面情報に対応付けることにより、表面情報が更新される。ここで、表面情報を更新するのに実写画像が適しているか否かが判断され、上記更新を実行するか否かが決定される。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム
【課題】表示部に表示されないデータを仮想オブジェクトとして常に観察可能な構成を実現する。
【解決手段】例えばPCを適用したデータ処理において、削除処理やコピー処理の対象としたデータなどPCの表示部に表示されないデータを仮想オブジェクトとして設定し、ユーザの手の指などに貼り付けて、常に観察することを可能な構成とした。本構成によれば、PCの表示領域に表示されないデータをPCの表示領域以外の空間に貼り付けて表示して観察することが可能となり、データ処理の効率を高めることが可能となる。
(もっと読む)
101 - 120 / 396
[ Back to top ]