
Fターム[5B057DC07]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 特徴の抽出 (25,407) | 幾何学量の算出 (10,741) | 特徴点 (2,407) | 始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC07]に分類される特許
141 - 160 / 396
路面標示地図生成方法及び路面標示地図生成装置
【課題】 道路を走行しながら路面を撮影した画像から、路面標示を含む路面標示地図を生成する。
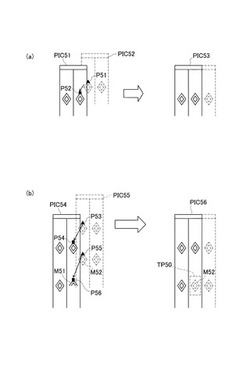
【解決手段】 道路を走行しながら路面をビデオカメラで撮影するとともに、各撮影地点の位置座標をGPS等で取得する。コンピュータは、この動画の各フレーム画像を変換して真上から見た状態の正射画像を生成し、撮影地点の位置座標に基づいて走行したパス上に配置することで、連結画像を生成する。次に、位置の異なる複数パス分の連結画像PIC54,PIC55内に共通して写されている対応点P53〜P56を画像処理によって自動的に特定する。そして、画像撮影時の位置精度が低い側のパスの対応点を、位置精度が高い側のパスの対応点に一致するように、連結画像を構成する各正射画像の配置を平行移動する。
(もっと読む)
地図データの編集方法

【課題】 建物と道路等の他の地物との交差を取り除く編集処理を、コンピュータで自動化することを可能とし、かつ、建物の形状や位置精度をできるだけ損なわないようにする。
【解決手段】 測量・地図調製により作成された、建物を含む原地図データを入力し、該原地図データに編集を加えて出力する地図データの編集方法において、建物を含む地形・地物を線分に分解し、地形・地物を分解した線分の内、建物と交差する交差線を検索する。その結果、建物と交差する交差線があったら、交差線が存在した建物において、交差線から最も離れた点を不動点とし、交差点を挟んで前記不動点の反対側にある部分の内、最も離れた点を最大移動点とし、該最大移動点を基点として、前記建物と交差線との交差が解かれる、建物の最適な圧縮方向を決定する。そして、前記不動点を固定し、最大移動点を前記圧縮方向に交差が解かれる位置まで移動させて、建物全体を圧縮する。
(もっと読む)
カメラ
【課題】カメラの操作者や画像の撮影者の役割等を考慮しつつ、さらに、プライバシーの保護や画像の検索性を考慮して、最適な画像表示を可能としたカメラを提供すること。
【解決手段】画像の撮影がなされた場合に、画像群決定部108は、撮影された画像における特定の顔の有無、顔の数、笑顔度、撮影者等の情報を画像管理ファイルに記録する。カメラ100の画像を画像表示装置200に送信するに際し、代表画像選択部109は、操作者特定部110によってカメラ100の操作者を特定し、特定した操作者の情報と画像管理ファイルに記録された情報とから、撮影された画像が属する画像群における代表画像を決定する。
(もっと読む)
画像処理装置および画像処理方法、ならびに、撮像装置
【課題】特定の被写体を適切に追跡することができるようにする。
【解決手段】先ず、入力画像に対して顔検出を行い(S402)、検出された顔領域を基準画像として登録する。次のフレーム画像に対して基準画像によるマッチング処理を施し、相関度の高い部分画像を抽出する(S405)。追跡を継続するか否かを判定する条件が設定されていれば(S406)、その条件を満たしているか否かが判定され(S409)、満たしていればマッチング処理による部分画像で基準画像が更新される(S403)。判定条件が設定されていなければ、マッチング処理の信頼度が算出され、閾値と比較される(S407、S408)。信頼度が閾値以上であれば、マッチング処理による部分画像で基準画像が更新される(S403)。信頼度が閾値未満であれば、判定条件が設定され(S409)、その条件を満たしているか否かが判定される(S410)。
(もっと読む)
物体端の位置決め方法及びシステム
【課題】特殊な機器又は衣服を装着することなく物体(人体)の2本のリム(脚)の下端を位置決めする。
【解決手段】原画像に前景処理を施して前景画像を取得し、この前景画像に係る多数の変向点を取得する。これら変向点の接続は折線を形成する。各変向点を隣接する2つの変向点に接続する両線分の挟角に基づいて、各変向点を凸点又は凹点のいずれかに分類し、選定された多数の凸点(a1〜a4)及び選定された多数の凹点(b1、b2)を選択する。この選定された凸点(a1〜a4)のうちの2つ(a1,a2)をそれぞれ仮端部として選択する。これら2つの仮端部と両仮端部間に位置する選定された凹点(b1)の接続は三角形を形成する。前記2つの仮端部に基づいて、物体の2本のリムの下端を位置決めするための2つの位置決め端部を決定する。
(もっと読む)
細胞画像解析装置
【課題】 撮影により得られた細胞画像を利用して、細胞の移動距離、ベクトル情報を定量化することが可能な細胞画像解析装置を提供する。
【解決手段】 所定のラインパターンを設けた細胞培養ディッシュ内で培養された細胞を時間を変化させて撮影することにより得られた各細胞画像を用意しておく。時間的に先行する細胞画像に映されている細胞上と、時間的に後の細胞画像に映されている同一細胞上の点が位置指定手段30により指定されると、指定位置定義手段41が、上記指定された2点をそれぞれ移動開始位置、移動終了位置として定義する。移動距離算出手段42は、定義された移動開始位置、移動終了位置および撮影画像の縮尺より移動距離を算出する。また、ベクトル情報算出手段43は、定義された移動開始位置、移動終了位置を結ぶ直線の傾きを利用してベクトル情報を算出する。このようにして、細胞の動きを定量化することが可能となる。
(もっと読む)
顔検出装置
【課題】 監視カメラなどの画像撮影装置で得られた画像データから、誤検出率を上げることなく、高い顔検出率で高速に顔画像領域を検出する。
【解決手段】 顔尤度算出部3は、入力される画像データの検出領域において第1の顔検出アルゴリズムを用いての顔尤度を算出し、顔尤度判定部4は上記顔尤度がしきい値α以上か否かを判断する。顔周辺尤度算出部5は、しきい値α以上顔尤度を有する検出領域において、第2の顔検出アルゴリズムを用いて顔周辺尤度を算出する。第1の顔検出アルゴリズムは第2の顔検出アルゴリズムに比較して高速な顔検出アルゴリズムであり、第2の顔検出アルゴリズムは第1の顔検出アルゴリズムに比較して、顔画像領域の高い検出率及び低い誤検出率を有する。
(もっと読む)
監視用画像処理装置
【課題】カメラにより絞り補正やホワイトバランス補正が実施されて、映像中のコントラストが変動しても、精度よく、映像中に存在する人物の数を類推することができるようにする。
【解決手段】輝度データ抽出部9により抽出された輝度データを参照して、映像の輝度の分布を示す輝度ヒストグラムを作成する輝度ヒストグラム作成部9を設け、補正係数特定部10が輝度ヒストグラム作成部9により作成された輝度ヒストグラムの形状を解析し、その形状の解析結果にしたがってコーナー点抽出部8により計数された個数を補正することで、人数類推部13により類推される人物の数を間接的に補正する。
(もっと読む)
画像合成装置、画像合成プログラム、画像合成方法、及び端末装置、端末制御プログラム、画像情報送受信方法
【課題】顔の所定構成要素が合成された多様な立体合成画像を迅速に得る。
【解決手段】人物を撮影すると、この撮影された二次元の撮影顔画像(x)における両目間の距離Lx1と、片目と口との間の距離Lx2との比率Lx1:Lx2と同じまたは近似する比率を有する三次元の立体画像を、画像データ管理テーブルの中に記憶されている、例えば昆虫等の複数の三次元の立体昆虫画像(a)の中から検索抽出する。そのあとに、撮影顔画像(x)の左目Ix1、右目Ix2、鼻Nx、口Mxを、検索抽出された立体昆虫画像(a)の左目、右眼、鼻、口に置換して合成し、この合成された昆虫の顔画像を含む立体全身合成画像(ax)を生成する。この結果、撮影された人物の顔画像が二次元の顔画像(x)であった場合でも、その撮影された顔の特徴が反映された立体の昆虫画像(ax)を迅速かつ確実に得ることができる。
(もっと読む)
画像処理装置
【課題】色変換の処理速度を向上可能な画像処理装置を提供する。
【解決手段】カラー画像処理を行う画像処理装置に、第一のカラー形式で記述された文書データを入力する入力部と、入力された文書データを解析し、各図形の形状を指定するための形状情報と、色を指定するための第一カラー情報とを、それぞれ検出する解析検出部と、検出された各第一カラー情報を合成して、第一合成カラー情報を生成する合成生成部と、生成された第一合成カラー情報を、第二のカラー形式に色変換して、第二合成カラー情報を生成する変換生成部と、生成された第二合成カラー情報から、各図形に対応する第二カラー情報をそれぞれ取得する取得部と、解析検出部により検出された各形状情報と、取得部により取得された各第二カラー情報とに基づいて、各図形を描画するためのラスタライズデータを生成するラスタライズ部とを設ける。
(もっと読む)
穂の構造の解析方法および装置
【課題】稲穂などの穂の分岐構造を含む穂の形態を解析する汎用的な解析装置を提供する。
【解決手段】本発明による植物の穂の分岐構造を解析する解析装置は、穂の画像を採取する画像採取部(101)と、該穂の画像から枝および籾を抽出する部分抽出部(103)と、枝の分岐の状態を定める分岐状態決定部(105)と、枝の分岐の状態に対応した木構造を有するデータファイル(115)と、を含む。該分岐状態決定部は、該枝の分岐の状態を該データファイルに格納する。
(もっと読む)
画像処理装置
【課題】画像処理ユニットから送られてくるデータ等の情報の取りこぼしを防止することができる画像処理装置を提供すること。
【解決手段】本発明の画像処理装置は、所定の画像データの処理を行うための少なくとも1つの画像処理ユニット1と、画像処理ユニット1から出力されるデータを一時的に記憶するデータ一時記憶装置2と、画像処理ユニット1から出力されるデータをデータ一時記憶装置2を介して受けるホスト処理装置3と、を具備する。画像処理ユニット1は、配線基板の上にマイクロプロセッサ、ロジックアレイ、メモリ装置及びこれらを接続する接続手段と外部信号入出力のための少なくとも1つの外部接続端子とを有し、前記マイクロプロセッサ及び前記ロジックアレイに組み込まれるソフトウェアによりデータの処理内容が決定される少なくとも1つのセル基板11を具備する。
(もっと読む)
位置姿勢計測装置及び方法
【課題】観察対象物体の3次元モデルデータから抽出した特徴のうち、位置姿勢の算出に用いる特徴を適切に選別することにより、位置姿勢検出処理の安定化、効率化を図る
【解決手段】位置姿勢算出装置は、観察対象物体の表面形状を表す3次元モデルデータを描画することにより前記観察対象物体の幾何的情報に基づく複数の幾何特徴を抽出する。そして、観察対象物体に対する撮像装置の位置姿勢が算出済みとなっている参照画像において複数の幾何特徴に対応する画像特徴を探索し、対応する画像特徴が検出された幾何特徴を、抽出された複数の幾何特徴より選別する。位置姿勢算出装置は、こうして選別された幾何特徴を入力画像における観察対象物体の画像に対応付けることにより、撮像装置の観察対象物体に対する位置姿勢を算出する。
(もっと読む)
情報処理方法、情報処理装置、プログラム、およびコンピュータ読み取り可能な記録媒体
【課題】情報処理方法、情報処理装置、プログラム、およびコンピュータ読み取り可能な記録媒体を提供すること。
【解決手段】記憶媒体に記憶されている第1の人物の映像、および撮像装置により撮像された第2の人物の映像を取得する取得ステップと、前記第1の人物の映像および前記第2の人物の映像を含む表示画面を生成する生成ステップと、前記第1の人物の映像および前記第2の人物の映像において、前記第1の人物および前記第2の人物のフォームを比較する比較ステップと、前記比較の結果を前記第2の人物に通知するための処理を行う通知ステップと、を含む情報処理方法。
(もっと読む)
画像処理装置及び方法、プログラム、記憶媒体
【課題】 顔特徴部位の検出精度を向上させる。
【解決手段】 顔に関する参照データを設定する設定モードと該参照データを用いて顔に対する判定を行う判定モードとにおいて、顔の特徴部位の検出に用いるパラメータを、それぞれ設定する検出パラメータ設定部105と、顔の特徴部位の位置をそれぞれのモードで設定されたパラメータを用いて検出する顔特徴部位位置検出部104と、それぞれのモードで検出された前記特徴部位の位置に基づいて特徴量を算出する特徴量算出部110と、設定モードで算出された特徴量に基づいて参照データを設定する参照データ設定部113と、判定モードで算出された特徴量と参照データとを用いて、顔に対する判定を行う表情判定部112とを備える。
(もっと読む)
2次元コード読取装置とそのプログラム
【課題】 2次元コード画像が曲線状歪みを有する場合でも、この曲線状歪みを効果的に矯正して高精度のコード解読を可能にする。
【解決手段】 カメラ2により撮像された2次元コードの画像データを二値化画像に変換した後、当該二値化画像から2次元コードのファインダパターンを検出し、この検出されたファインダパターンの上下左右各辺の座標値を検出する。そして、この検出されたファインダパターンの上下左右各辺の座標値をもとに、上記2次元コードの画像データの上下左右各辺の形状を直線及び曲線で近似した近似線を生成し、この生成された近似線をもとに上記2次元コードの画像データの歪みを矯正して、この歪みが矯正された2次元コードの画像データをもとに上記2次元コードを解読する。
(もっと読む)
道路網データ生成装置及び交差点内車線生成装置、並びにこれらの方法及びプログラム
【課題】
車線単位で車両の誘導又は運行制御を可能にする道路網データを生成する。
【解決手段】
交差点切り抜き装置(14)は車線データ(10)から交差点範囲を切り抜き、各車線の当該交差点との接続点を示す接続点データ(14a)と、交差点外車線データ(14b)を出力する。交差点DB生成装置(16)は、接続点データ(14)と、属性データ(12)に含まれる進行方向属性データに従い、交差点において進行可能な進入点と退出点の1以上の組み合わせを有する交差点データベースを生成し、ハードディスク(18)に格納する。交差点内車線生成装置(20)は、交差点データベースから交差点内車線データを生成する。合成装置(22)は、交差点外車線データ(14b)と交差点内車線生成装置(20)からの交差点内車線データを合成して、道路網データ(24)を生成する。
(もっと読む)
電子スチルカメラ
【課題】撮影画像中により高いレベルの表情の画像を含ませること。
【解決手段】電子スチルカメラに、笑顔の度合いを段階的に表す複数の笑顔レベルを記憶した笑顔レベルデータ記憶部33と、笑顔の度合いを示す第1の笑顔レベル値と、第1の笑顔レベル値より度合いの低い第2の笑顔レベル値とを設定する笑顔レベル設定部41と、被写体の笑顔レベルが第1および第2の笑顔レベル値にそれぞれ対応したことを判定し、第1の笑顔レベル値に対応したと判定した時に第1の出力信号を発生し、第2の笑顔レベル値に対応したと判定した時に第2の出力信号を発生する笑顔レベル判定部23と、第1の出力信号に応じて連続撮影を開始し、第2の出力信号に応じて連続撮影を終了する自動連続撮影部24とを設ける。
(もっと読む)
画像処理装置、画像処理プログラム、および画像処理方法
【課題】被写体の検出精度を向上させる画像処理装置を提供する。
【解決手段】可動する耳を有する被写体の画像から、顔候補検出部104によって、被写体の顔候補を検出し、さらに付属部位検出部106によって被写体の耳を検出する。そして、頭部決定部107によって、検出した顔候補と耳とによって画像中から、被写体を検出する。
(もっと読む)
線画処理装置、線画処理方法およびプログラム
【課題】線画から網点部分を容易かつ精密に分離する技術を提供する。
【解決手段】線画処理装置100は、描画領域DRの輪郭部分に沿って輪郭部分を構成する画素の曲率値を順次決定し、輪郭部分における各画素位置の曲がり度合いを定量化する。そして、線画処理装置100は、所定の基準値との比較に基づき、描画領域DRを拡張させる方向に曲がる画素(変曲点P)を検出し、さらに、所定の位置関係にある変曲点P間を分離線Lで結ぶことによって、描画線DLから突出する突出領域ERを描画領域DRから分離する。そして、線画処理装置100は、所定の基準面積以下の描画画素集合を除去することによって、分離した突出領域ERを画像から除去する。
(もっと読む)
141 - 160 / 396
[ Back to top ]