
Fターム[5B057DC07]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 特徴の抽出 (25,407) | 幾何学量の算出 (10,741) | 特徴点 (2,407) | 始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC07]に分類される特許
81 - 100 / 396
画像処理装置、画像処理方法、画像処理プログラム
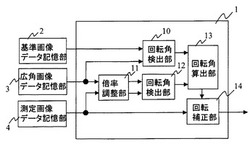
【課題】試料の観察画像の回転を精度よく検出することのできる画像処理技術を提供する。
【解決手段】本発明に係る画像処理装置は、試料の測定箇所を含む広角画像データを介して、測定画像データと基準画像データの間の回転ずれを間接的に補正する。
(もっと読む)
柵状欠陥検出装置および柵状血管検出方法

【課題】動画データ等の多量の画像データからバレット食道等の注目する性状の判定を効率良く行うことができる柵状欠陥検出装置を提供する。
【解決手段】食道内の粘膜表面を撮像した医用画像から線構造を抽出する線構造抽出手段と、前記線構造の持つ形状特徴量から胃側となる各終端を算出する終端算出手段と、前記形状特徴量から抽出された線構造が柵状血管であるか否かを判定する柵状血管判定手段と、を具備することを特徴とする。
(もっと読む)
画像処理装置及び画像処理方法
【課題】画像に対し局所的な階調補正を行う画像処理装置において人物の顔等の特定種類のオブジェクトが存在する領域に対する階調補正が不均一になることを抑制する。
【解決手段】オブジェクト領域に関する座標情報を取得する取得部102と、入力画像を複数の分割領域に分割する分割部103と、複数の分割領域の各々の輝度情報に基づいて分割領域毎の階調補正係数を決定する第1決定部105と、オブジェクト領域に関する座標情報及び複数の分割領域の階調補正係数に基づいてオブジェクト領域に対する階調補正係数を決定する第2決定部106と、オブジェクト領域に対して、第2決定部により決定される階調補正係数を座標に依らず一様に適用して階調補正処理を行うとともに、オブジェクト領域以外の領域に対して、第1決定部により決定される分割領域毎の階調補正係数を用いて、座標に応じて重み付け補間した階調補正処理を行う画像処理部107と、を備える。
(もっと読む)
気管支鏡検査法ガイダンスに適用される画像ベースのグローバル登録
グローバルな登録システム及び方法は、大きな気管支鏡操作、専門家の介入、又は電磁気センサを必要とせずに気管支鏡位置を識別する。気道ツリー内の分岐位置のVBビューを含む三次元(3D)気道ツリーの仮想気管支鏡(VB)レンダリングが得られる。少なくとも1つの実際の気管支鏡(RB)ビデオフレームが気道ツリー内に挿入された気管支鏡から受信される。本発明に従うアルゴリズムは、コンピュータ上で受信したRBビューに最も近いVBビューを最も見込みのありそうな分岐位置の幾つかを識別する演算を行う。気道ツリー内の気管支鏡の3D位置はVBビューで識別された分岐位置に従い決定される。好ましい実施例は、ベストマッチを見つけるために使用する二乗距離行列の重みづけ正規化和を用いてグローバルな気道分岐点サーチ空間におけるあらゆる分岐にわたり高速のローカル登録サーチを取り込む。 (もっと読む)
プロジェクターシステムを較正する方法、プログラム、コンピューターシステムおよびプロジェクターシステム
【課題】任意の組み込み関数を有するプロジェクターおよびポーズを自動的に再較正し、
さらに任意の望まれる視点に対し表示することのできる方法を提供すること。
【解決手段】観察カメラとプロジェクターを用いて立体のペアを形成し、構造化された光
を用いて表示面のピクセルレベルでの微細な再構成を行なう。幾何学形状的な歪みは直接
的なテクスチャーのマッピング問題として実施される。その結果、プロジェクターの動き
の再較正は単に新しい投影行列を演算してカメラ行列として設定することにより実施され
る。新視点を再較正するために、テクスチャーのマッピングは新しいカメラ行列に従い修
正される。
(もっと読む)
照明灯の三次元位置測定方法
【課題】駅構内等の天井部等に設置された多数の照明灯をカメラで撮影し、その画像に基づき多数の照明灯の各々の存在を検出し、その設置位置を三次元的に正確に測定し、照明灯の自動清掃システムを実現する照明灯の三次元位置測定方法を提供する。
【解決手段】本発明に係る照明灯の三次元位置測定方法は、測定対象となる照明灯11を検出する第1ステップS10と、検出した照明灯の三次元位置を測定する第2ステップとS20、その他の複数の照明灯について、測定対象となる照明灯が存在しなくなるまで第1ステップと第2ステップを繰り返す第3ステップS30とからなる方法である。
(もっと読む)
画像認識プログラム、画像認識装置、画像認識システム、および画像認識方法
【課題】画像から所定の物体または図柄を高い精度で検出できるようにすること。
【解決手段】まず、或る画像から輪郭または頂点が検出されたか否かを判定する。そして、或る画像から輪郭または頂点が検出されたと判定された場合には、当該画像における、当該画像から検出された輪郭または頂点によって囲まれる領域に対してパターンマッチング処理を行う。そして、当該領域に所定物体または所定図柄が表示されていると判定された場合には、当該領域に関連する位置を示す検出位置情報を記憶領域に記憶する。一方、上記の或る画像から輪郭または頂点が検出されなかったと判定された場合には、記憶領域に記憶されている検出位置情報に基づいて、当該画像に対してパターンマッチング処理を行う。
(もっと読む)
画像処理装置及び方法、並びにプログラム
【課題】記念撮影等で構図の自由度を高めつつ簡便な操作で、人物全員が含まれた画像を得ること。
【解決手段】前景らしさ判定部63は、背景及び前景物体が含まれる第1フレーム原画像と、背景が含まれ、かつ第1フレーム原画像とは異なる位置に前景物体が含まれる第2フレーム原画像との各々に含まれる一定長以上の直線エッジを、背景の構造物のエッジとして、第1原フレーム画像及び第2原フレーム画像のうち、一方の領域に直線エッジが含まれ、他方の同一位置の領域に直線エッジが含まれない場合、他方の前記領域に前景物体が含まれる確率が、それ以外の場合よりも高いという前提事項の下、コスト関数のデータ項を設定する。前景切取線決定部65は、設定されたデー項を含むコスト関数が最小となるように、第1原フレーム画像及び第2原フレーム画像の切取線を決定する。
(もっと読む)
監視カメラ画像を用いた連動表示計測システム
【課題】段階的な手段をとらなくとも一目で監視カメラ画像、三次元画像、平面図画像上での指定個所をそれぞれの画像上で正確に直に提供できる単眼視の監視カメラ映像を用いた連動表示計測システムを得る。
【解決手段】カメラ選択部31と、モード判定部32と、画角設定部33と、表示処理部34と、カメラ画像指定個所連像表示部11と、GIS画像指定個所連動表示部12と、平面図指定個所連動表示部13等を備えて、対象範囲が数キロに亘る広範囲で撮影されたカメラ画像を三次元地形モデルに対応付けて、その監視カメラが撮影した三次元GIS画像並びに平面図画像を連動表示すると共に、いずれかの画像(カメラ画像、三次元GIS画像若しくは平面図画像)上の指定位置(カーソル)を各々の画像上に連動表示し、かつその指定位置の三次元座標を知らせる。
(もっと読む)
車両の衝突を回避するための装置
【課題】交差点の見通し範囲を把握し、的確なタイミングで他車両との衝突回避動作を発動する。
【解決手段】車両の周辺の障害物の位置に基づいて、車両から前方を見通せる見通し範囲を算出する。見通し範囲外から車両に向けて接近してくる移動物体と衝突することなく、交差点を該車両が通過することが可能な通過可能速度VTを、見通し範囲に基づいて算出する。通過可能速度VTよりも車両の現在の速度VNが小さいとき、衝突回避のための制御を発動する。また、車両が交差点に進入するまでに停止可能な最大速度VSを算出し、車両の現在の速度VNが該停止可能速度VSより小さいときには、該現在の速度が通過可能速度VTより小さくても、衝突回避のための制御の発動を抑制する。見通し範囲の大きさに応じた通過可能速度VTを算出するので、見通し範囲に応じて運転者が取り得る速度を考慮しつつ、衝突回避の制御を適切なタイミングで発動させる。
(もっと読む)
捜索目標位置特定装置及び捜索目標位置特定方法並びにコンピュータプログラム
【課題】航空機から捜索した起伏の多い地表面の目標物を精度良く測定し、位置特定の精度を向上させることを可能にすること。
【解決手段】目標物3の位置を水平面に投影した位置は、捜索目標物3が水平面から高さHの位置に有るので、カメラ2から見て捜索目標物3の方向に延ばした直線L1と、水平面との交点からR1だけずれた位置となる。しかし、実際には、地表面4は高度情報を含む3次元地勢データのメッシュで区切られた階段状の高度7であるため、この位置は符号R1' で示す位置となり、誤差が生じている。そこで、捜索目標物3に近接する既知の位置情報を有するランドマーク5とランドマーク6との間のカメラ2から見た方向角を計測することにより、ランドマーク5及びランドマーク6の高度を各々計測し、この高度情報を用いて目標物3の高度情報を算出し、捜索目標物3の方向に延ばした直線との交点を求めて捜索目標物3の位置を特定する。
(もっと読む)
顔方向特定装置及び撮像装置
【課題】簡素な処理で顔方向の特定が可能な顔方向特定装置及び撮像装置等の提供。
【解決手段】顔方向特定装置は、少なくとも撮影者の目を撮像可能な撮像部により撮像された撮像画像を取得する画像取得部と、取得された撮像画像に基づいて、撮影者の目領域での反射光の反射光情報を検出する反射情報検出部と、検出された反射光情報に基づいて、撮影者の顔方向を特定する顔方向特定部を含む。
(もっと読む)
鋼板の突き合わせ開先位置の検出方法および装置
【課題】端部に「ダレ」を有している鋼板においても、正確にかつ安定して突き合わせ開先位置を検出する。
【解決手段】2枚の鋼板の突き合わせ部を、突き合わせ線が前記撮像装置の撮像面の水平軸方向となるようにして撮像する撮像工程と、撮像工程で取得された撮像画像から得た部分画像を、予め設定した閾値Tを用いて2値化画像を出力する2値化工程と、2値化画像において水平軸方向をx軸方向、垂直軸方向をy軸方向として、各画素座標(i、j)の2値化輝度値U´について、y軸方向の輝度差分値Vを、各iについて演算する工程イと、工程イで演算した輝度差分値Vをiについて積算して輝度差分射影値Wを演算する工程ロと、工程ロで演算した輝度差分射影値Wにおいてピークの画素位置を求めて、前記2枚の鋼板それぞれの突き合わせ開先位置として検出するピーク位置検出工程とを有する検出方法。
(もっと読む)
動画像作成装置及び動画像作成方法
【課題】全体画像中に複数の人物被写体が写っている画像領域が存在する場合において、各画像領域の人物の数に応じて画像領域の大きさを変更した動画像を作成可能な動画像作成装置及びそのための動画像作成方法を提供すること。
【解決手段】表示部104の画面中の複数のポイントが指定されると、それぞれの指定されたポイントに含まれる顔が顔検出部103によって検出され、検出された顔を含む顔画像の位置が検出される。その後、一部拡大スルー画表示が開始されると、顔画像の位置関係に基づいて顔画像の合成位置が決定されるとともに、顔画像中の顔の数に基づいて顔画像の拡大率が決定される。そして、顔画像を拡大して得られる拡大画像と表示部104の画面の全体を示す全体画像とが合成され、この合成動画像がスルー画表示される。
(もっと読む)
画像処理装置
【課題】抽出精度の向上を可能とする画像処理装置の提供。
【解決手段】記憶部10は、スキャン領域に関する時系列のボリュームデータを記憶する。操作部22は、スキャン領域内の抽出対象領域上にユーザからの指示に従って開始点を指定する。時間濃度曲線生成部12は、時系列のボリュームデータに基づいて、開始点に関する第1時間濃度曲線と、スキャン領域内の対象点に関する第2時間濃度曲線と、対象点の近傍に位置し開始点に連結する基準点に関する第3時間濃度曲線とを生成する。判定部14は、第2時間濃度曲線と、第1時間濃度曲線及び第3時間濃度曲線の少なくとも一方とに基づいて、対象点が抽出対象領域に属するか否かを判定する。抽出部16は、対象点が抽出対象領域に属さないと判定された場合、対象点を抽出対象とせず、対象点が抽出対象領域に属すると判定された場合、対象点を抽出対象とする。
(もっと読む)
サインに基づくマンマシンインタラクション
【課題】人間のサイン及びジェスチャのコンピュータ視覚認識に基づくヒューマンコンピュータインタラクション方法を提供する。
【解決手段】人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。
(もっと読む)
血管交差・分岐部位の抽出方法及び装置
【課題】本発明は、眼底画像からより高い確率で血管の交差・分岐部位を抽出する方法を提供することを目的とする。
【解決手段】抽出候補領域の外周部上に血管が3本以上走っていることと、外周部の複数の血管の座標平均が抽出候補領域の中央部に存在することを条件として眼底画像から血管の交差・分岐部位を抽出する。
(もっと読む)
走行支援装置および走行支援方法
【課題】検出対象を回避する必要があるかを適切に判断可能な走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段20a,20bと、撮像手段20a,20bにより撮像された画像の情報に基づいて、画像内に存在する特徴点を抽出する特徴点抽出手段と、特徴点の移動方向および移動速度を含む移動情報を算出する移動情報算出手段と、移動情報に基づいて、検出対象を含む対象領域を抽出する対象領域抽出手段と、撮像手段20a,20bから見た検出対象の移動速度を、相対角速度として算出する相対角速度算出手段と、相対角速度に基づいて、検出対象を回避する必要があるかを判断する判断手段と、を有することを特徴とする走行支援装置。
(もっと読む)
画像処理装置
【課題】顔の特徴部位の座標位置の検出処理の精度向上が望まれていた。
【解決手段】画像に含まれる顔の特徴部位の座標位置を検出する画像処理装置であって、注目画像から顔の少なくとも一部を含む画像領域を顔領域として検出する顔領域検出部と、上記顔領域を含む所定範囲の画像を平滑化する平滑化処理部と、上記平滑化された画像に基づいて上記特徴部位の座標位置を検出する特徴位置検出部とを備える。上記平滑化処理部は、顔領域に対する顔画像の大きさ、角度、位置を表す予め規定された各パラメーターに応じて顔領域を基準にして特定される範囲の全て含む範囲の画像を平滑化する。
(もっと読む)
3次元データ生成装置、3次元データ生成方法およびプログラム
【課題】ステレオ画像から比較的簡易に2枚の画像の対応点を求める3次元データ生成装置、3次元データ生成方法およびプログラムを提供する。
【解決手段】画像データ入力部2は、異なる位置から所定の領域を撮影した2つの画像の画像データを取得する。位置指定部3は、2つの画像データのそれぞれの画像で、1つの構造物の領域に含まれる画像上の指定点を取得する。閉領域抽出部4は、2つの画像データのそれぞれの画像で指定点を含み、指定点との色の差が所定の範囲であって連続する画素の集合である閉領域を抽出する。外形ベクトル生成部5は、2つの画像のそれぞれで抽出した閉領域の輪郭に沿って一巡する外形ベクトルを抽出する。3次元データ計算部7は、2つの画像データのそれぞれの外形ベクトルが同じ構造物の外形に対応するとみなして、2つの画像データからその構造物の外形の3次元の位置座標を算出する。
(もっと読む)
81 - 100 / 396
[ Back to top ]