
Fターム[5B057DC07]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 特徴の抽出 (25,407) | 幾何学量の算出 (10,741) | 特徴点 (2,407) | 始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC07]に分類される特許
21 - 40 / 396
塗布状態検査装置及び方法並びにプログラム
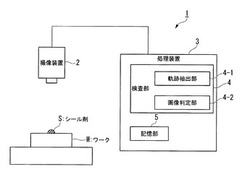
【課題】塗布全体にわたって異常を検出でき、シール剤に発生した切れ目に限らず、終端部における糸引き等、他の要因による塗布の異常を検出することができ、また、基準ワークを撮影するだけで、自動的に分岐点と端点とをカウントすることができ、容易に部品形状の変更に対応することができる塗布状態検査装置を提供する。
【解決手段】シール剤Sが塗布されたワークWを撮像する撮像装置2と、撮像装置2によって撮像された撮影画像から、シール剤Sの塗布軌跡を抽出する軌跡抽出部4−1と、正常品の分岐点の個数と端点の個数とを記憶する記憶部5と、塗布軌跡の分岐点の個数と端点の個数とをカウントし、記憶部5に記憶されている正常品の分岐点の個数と端点の個数と比較し、双方が一致する場合に塗布軌跡が正常であると判定し、双方が一致しない場合に塗布軌跡が異常であると判定する画像判定部4−2とを備える。
(もっと読む)
道路勾配推定装置

【課題】片側の白線のみからでも車両前方の道路の道路勾配を推定可能な道路勾配推定装置を提供する。
【解決手段】画像処理部4で抽出した白線が破線であるとき、その白線のペイント部分と非ペイント部分の境界である端点を抽出する端点抽出部6と、視点変換処理を行い、車両前方の道路の道路勾配が、車両が走行している位置での道路勾配で一定であると仮定したときの各端点の見かけ上の位置を求める視点変換処理部7と、隣り合う端点間の見かけ上の距離と、予め求めた隣り合う端点間の実際の距離とに基づき、各端点間の勾配を求める端点間勾配取得部9と、端点間勾配取得部9が求めた各端点間の勾配に、車両が走行している位置での道路勾配を足し合わせることで、端点間の実際の道路勾配を求める道路勾配演算部10と、を備えた。
(もっと読む)
電子機器の情報入力装置及び方法
【課題】顔の特性である顔の姿と顔の位置と顔の動きにより、手が入力操作できる入力操作領域を確定し、顔の特性と手の特性である手の姿と動きに応じて入力面の選択や選択された入力面に対しての情報の入力を可能とする。
【解決手段】情報入力装置は、撮像手段と、該撮像手段の映像から顔情報を抽出し、顔の特性情報を確定する顔の特性確定手段と、該撮像手段の映像の入力操作領域から手の特性情報を確定する手の特性確定手段と、前記顔特性情報と前記手特性情報に基づき、現在の指示体状態を確定する指示体状態確定手段と、前記入力操作領域と入力面と指示体状態と指示体状態が継続する時間と操作指示との組合せからなる操作手順より操作状態を確定する操作状態確定手段と、確定した前記操作状態に従って、入力操作領域の配置位置の確定又は入力面の選択又は入力情報の生成の操作指示を実施する操作手順実施手段とを具備する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 2値データに対してフィルタ演算を行うフィルタ演算処理の処理量を削減できる装置及び方法を提供する。
【解決手段】 処理対象である2値データに対してフィルタ演算を行う画像処理装置が、処理対象である2値データの変化点の個数を算出して格納しておく。そして、処理対象である2値データに対してフィルタ演算を行いながらその2値データの変化点の個数を計数し、計数された変化点の個数が、格納されている変化点の個数以上になった場合に、フィルタ演算を行わずに前記2値データを処理する。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の規則性に基づいて対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、対象部位の輝度から、対象部位に対応する特定物を仮決定し(S302)、水平距離の差分および高さの差分が第1所定範囲内にある、同一の特定物に対応すると仮決定された対象部位をグループ化して対象物とし(S304)、任意の対象物から、水平距離の差分、高さの差分、および、相対距離の差分が第2所定範囲内にある、同一の特定物に対応すると仮決定された対象物を順次検出し、対象物群を特定し(S306)、対象物群における対象物の数に応じて対象物群が特定物であるか否かを決定する(S308)。
(もっと読む)
錠剤検査装置及びPTP包装機
【課題】PTPシートの製造過程における錠剤の欠け等の検査に際し、検査精度の飛躍的な向上を図ることのできる錠剤検査装置及びPTP包装機を提供する。
【解決手段】錠剤検査装置21は、容器フィルムのポケット部に収容された錠剤に対し光を照射可能な照明装置22と、照明された範囲内の錠剤を撮像可能なカメラ23と、カメラ23から出力される画像信号を処理する画像処理装置24とを備える。画像処理装置24は、目標となる錠剤の輪郭に関し、重心を原点とする各角度毎の複数の各点の接線の向き情報を目標向き情報として記憶しておき、検査に際し、抽出された錠剤の輪郭に基づき重心を特定するとともに、前記各角度毎の対応する各交点の接線の向き情報を求め、当該接線の向き情報と目標向き情報とを比較する。そして、1の交点の接線の向き情報が、対応する目標向き情報に対し許容範囲を逸脱している場合に、不良候補として判定する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】溶接欠陥の判別に用いられ、ビードの形状を正確に認識可能であり、画像処理負荷を低減可能とする画像処理装置及び画像処理方法を提供する。
【解決手段】レーザ溶接の溶接部分の画像に基づいて溶接部分に形成されるビードmの形状を認識する画像処理装置において、レーザ溶接時の残熱発光が生じている溶接部分を撮影し、かつ取り込んだ画像に対応して、複数の基準線Lを設定する基準線設定部11と、残熱発光の輝度Hがビードmの輪郭線を識別するように設定した輝度閾値hより大きくなっている領域と、残熱発光の輝度Hが輝度閾値hより小さくなっている領域との間の境界が基準線Lと交差する箇所に、輪郭点pを形成する輪郭点形成部12と、同一基準線L上における2つの輪郭点p間に中間点qを形成する中間点形成部13と、複数の輪郭点pに基づいて輪郭線Pを形成する輪郭線形成部14とを備える画像処理装置。当該画像処理装置を用いた画像処理方法。
(もっと読む)
木構造抽出装置および方法ならびにプログラム
【課題】それぞれ1つの起始部から分岐を繰り返しながら離れる方向に広がって延びる第1および第2の線状構造物を含む医用画像データから、第1および第2の構造物に対応する木構造を精度よく構築する。
【解決手段】第1および第2の線状構造物のそれぞれ1つの起始部から分岐を繰り返しながら離れる方向に広がって延びるという特徴に基づいて、各ノードごとに、各ノードに接続可能な複数のエッジについて接続しやすさを表すコストを重み付けするコスト関数により、第1の木構造の根ノードに対応する第1の根ノードと第2の木構造の根ノードに対応する第2の根ノードのそれぞれから各ノードを接続する。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法
【課題】 従来の2次元画像と距離画像を併用した場合の位置姿勢計測手法に比べて、複雑背景下であっても高速かつロバストに位置姿勢を計測すること。
【解決手段】 2次元画像対応探索部140は、撮像画像中における仮想物体の幾何特徴と、撮像画像中に映っている現実物体において該幾何特徴に対応する特徴部分と、の対応付けを行う。対応探索領域設定部150は、仮想物体を構成するそれぞれの図形を距離画像上に投影し、該投影された図形の領域から、特徴部分に対応する距離画像内の部分の周辺を省いた残りの領域を、対応探索領域として設定する。位置姿勢算出部170は対応探索領域内の画素の奥行き値が示す位置と該画素に対応する仮想物体上の位置との3次元空間における距離、幾何特徴と特徴部分との3次元空間における距離、を表す評価関数を最小化するように位置姿勢情報を繰り返し更新する。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
拡張現実感提供装置及び仮想物体の重畳方法
【課題】マーカーを用いることなく、違和感のない拡張現実感を提供することが可能な拡張現実感提供装置を提供する。
【解決手段】地面推定部5は、撮像部1,2で撮像して得られる2つの撮像画像データの各々から顔を検出し、検出した顔の目と口を結ぶ三角形の三次元座標を算出する。地面推定部5は、2つの撮像画像データの一方から前記検出した顔を含む被写体の輪郭を抽出し、この輪郭を前記三角形の三次元座標を用いて三次元空間に逆投影する。地面推定部5は、三次元空間における前記輪郭のデジタルカメラ100の鉛直線の伸びる方向の端部を含みかつ当該方向に垂直な面を地面と推定する。地面推定部5は、表示部11に表示される立体映像において、前記推定した地面上に仮想物体を重畳表示させる。
(もっと読む)
電子カメラ
【課題】 人物撮影時に被写体の顔を検出するとともに、被写体の顔の特徴に基づいてユーザーが要求する処理を簡単に行う。
【解決手段】 電子カメラは、被写体像を撮影する撮像素子と、メモリと、顔検出部と、顔認識部と、外部に音を出力するスピーカーと、制御部とを備える。メモリは、認識対象となる顔の特徴量を示す登録データと、認識対象の人物の出身地または使用言語に関する特性データとの対応関係を記録する。顔検出部は、撮像素子の出力に基づいて撮影画面内の顔領域を検出するとともに、該顔領域から被写体の顔の特徴量を抽出する。顔認識部は、顔領域に対応する特徴量のデータと登録データとに基づいて、顔領域が認識対象であるか否かを判定する。制御部は、顔認識部の認識結果に基づいて、特性データに応じて決定されたかけ声を撮影時にスピーカーから出力させる。
(もっと読む)
内視鏡挿入支援装置およびその動作方法、並びに内視鏡挿入支援プログラム
【課題】術者が内視鏡の現在の位置から内視鏡を進めていったときに経路上にあらわれる分岐部の画像を即座に確認できるようにする。
【解決手段】管状構造物の入り口から目的部位に到達するまでの間の複数の経路において、複数の経路が該経路の分岐点により区切られる複数の区間のうち内視鏡が現在位置している区間内に存在する管状構造物の分岐部の仮想内視鏡画像Bと、内視鏡が現在位置で撮影した仮想内視鏡画像VEとを同一画面上に表示するとともに、分岐部の仮想内視鏡画像が複数の経路上のいずれの区間の画像であるかを認識可能に表示する。
(もっと読む)
ネットワーク構築装置および方法ならびにプログラム
【課題】医用画像データから、複数の構造物に対応する複数のネットワーク構造を精度よく構築する。
【解決手段】
複数のセグメントにおいて、構造物の交錯する部分に対応する部分が、1つのセグメントである交差セグメントとして存在し、交差セグメントの近傍に互いに直線をなすように接続可能なセグメントのペアが2以上存在するという特徴を規定する交差セグメント特徴条件に基づいて各セグメントが交差セグメントである交差セグメントらしさを算出し、各セグメントが直線をなすように各セグメントの近傍のセグメントと接続されるという特徴を規定する直線接続条件に基づいて各セグメントが他のセグメントと直線状に接続される直線らしさを算出し、交差セグメントらしさと直線らしさを用いて各セグメント間の接続強度を設定し、接続強度に基づいて各セグメントを接続して複数のネットワークを構築する。
(もっと読む)
画像処理装置、および画像処理方法
【課題】正確に瞳の領域を検出することができる画像処理装置を実現する。
【解決手段】本発明に係る画像処理装置6は、人物の顔画像から目の特徴を特定する画像処理装置であって、顔画像の目がある目領域を、少なくとも目における縦方向に微分して輝度勾配を求める第2微分部41と、目領域について、輝度勾配を2値化しエッジ点を抽出する2値化部42と、目頭点および目尻点を両端点とし、該両端点と制御点とによって表現される曲線であって、かつ、上記エッジ点に適合する曲線を、上瞼または下瞼の輪郭を表す曲線として特定する瞼輪郭特定部44とを備える。
(もっと読む)
車両検出装置および車両検出方法並びに車両検出プログラム
【課題】斜め方向から車両を撮影した画像に基づいて、被写体の車両に非対称な部分があるか否かを判断する。
【解決手段】車両を撮影した画像から、前記車両の正面の中央位置を示す部分と、前記車両の正面において水平方向に伸びる直線部分を示す複数の線分とを含む特徴部位を抽出し、前記中央位置を示す部分と前記中央位置を示す部分に近接する前記線分の相対位置に基づいて、前記線分の中心を求め、前記線分の中心から前記線分の一端までの距離と、前記線分の中心から前記線分の他端までの距離との比を算出し、前記複数の線分を前記比に基づいて内分する内分点を求め、前記各線分の内分点を結ぶ中心線を生成し、前記車両を撮影した画像に含まれる前記車両を表す部分の画像において、前記中心線を境界として前記車両の正面の左側部分と右側部分とを比較することにより、前記中心線を基準として非対称な特徴を持つ画像の領域を検出する。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】複数の検査画像のうちの1つで観察障害を特定したとき、その観察障害が特定された検査画像とは異なる検査画像において、観察障害が特定された部分に対応する部分を簡易に判別可能とする。
【解決手段】検査画像入力手段11は、医用画像撮影装置を用いて撮影された管腔を有する被検体の内部を示す第1及び第2の検査画像21、22を入力する。観察障害特定手段16は、第1の検査画像中の観察障害を特定する。対応位置決定手段17は、第2の検査画像における、第1の検査画像において特定された観察障害に対応する部分を特定する。仮想内視鏡画像生成手段13は、第1及び第2の検査画像から仮想内視鏡画像を生成する。対応位置明示手段18は、第2の検査画像22から生成された仮想内視鏡画像上に、対応位置決定手段17で特定された観察障害に対応する部分を明示する。
(もっと読む)
顔画像処理装置、顔画像処理方法、電子スチルカメラ、デジタル画像処理装置およびデジタル画像処理方法
【課題】顔の表情を自動的に判断し希望の画像を獲得することができる顔画像処理装置、顔画像処理方法、電子スチルカメラ、デジタル画像処理装置およびデジタル画像処理方法を提供する。
【解決手段】実施形態に係る顔画像処理装置は、顔画像を検出し、この顔画像を含む複数の人物の画像を入力する画像入力手段と、この画像入力手段により入力された複数の画像から1枚ごとに、あらかじめ作成された複数の目の状態にあわせた辞書の画像と得られた瞳の画像との類似度が最も高くなる状態を現在の目の状態とし、これを用いて前記複数の人物のそれぞれの顔が正面を向いているかどうか、もしくは瞳の開閉状態を判定し、撮影で必要とする状態に適した顔の状態を画像1枚ごとに確認しながら、前記複数の人物の各人ごとの顔の表情の評価値を用いて計算した画像1枚ごとの評価値が最も高くなる画像を選択して出力する画像選択手段とを具備する。
(もっと読む)
しわのエイジング及びディエイジングの現実的シミュレーションの方法及び装置
【課題】しわのエイジング及びディエイジングの現実的シミュレーションの方法及び装置を提供する。
【解決手段】表情画像内で見ることのできるしわをニュートラル画像の上に位置合わせし、しわのエイジングシミュレート画像を生成することによって、ニュートラル画像と表情画像を処理して、しわの経時変化をシミュレートする。その人自身のしわの組織学的データを用いるため、正確かつ現実的なしわのエイジングシミュレーションができる。同様に、目に見える全てのしわを除去し、しわのディエイジングシミュレート画像を生成する。更に、ニュートラル画像をエイジング又はディエイジングシミュレート画像とブレンドするが、ブレンドの度合いは、加齢による皮膚状態、及び/又は特定のタイプの処置の成果予想の統計的モデリングに基づく。用途としては、例えば、皮膚サイエンス、美容、及びコンピュータアニメーションなどの分野を含む。
(もっと読む)
三次元形状計測装置、および三次元形状計測方法
【課題】正確に半田の高さを算出することができる三次元形状計測装置を提供することである。
【解決手段】半田塗布前の検査ブロックにおいて、配線パターンの近似面を作成する(S22)。また、半田塗布前の検査ブロックにおいて、ランドの近似面を作成する(S23)。そして、作成した配線パターンの近似面Srとランドの近似面Slとに基づいて、オフセット、すなわち、配線パターンの近似面Srとランドの近似面Slとの距離を算出する(S24)。そして、算出したオフセットをRAM等に記録する(S25)。そして、半田塗布後に、記憶したオフセットを読み出して、半田の高さを計算する。
(もっと読む)
21 - 40 / 396
[ Back to top ]