
Fターム[5B057DC07]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 特徴の抽出 (25,407) | 幾何学量の算出 (10,741) | 特徴点 (2,407) | 始点、終点、屈曲点、分岐点 (396)
Fターム[5B057DC07]に分類される特許
121 - 140 / 396
車両検出装置
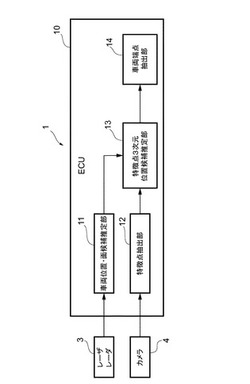
【課題】本発明は、画像から車両の情報を高精度に検出する車両検出装置を提供することを課題とする。
【解決手段】撮像手段4で撮像した画像から車両の情報を検出する車両検出装置1であって、車両の面の候補を推定する面候補推定手段11と、車両を撮像した画像から所定の特徴量を有する複数の特徴点を抽出する特徴点抽出手段12と、抽出した特徴点の3次元位置を推定する3次元位置推定手段13と、異なる時刻で撮像した各画像からそれぞれ推定された面候補の組み合わせ毎に、面候補間で複数の特徴点について特徴量の差が小さくなる特徴点の対応関係を探索し、当該探索された対応関係の複数の特徴点間において3次元位置を並進移動及び回転変換した上で位置誤差を求め、当該位置誤差が最少となる組み合わせの面候補を抽出し、当該抽出した組み合わせの面候補に基づいて車両の面を検出する車両情報検出手段14とを備えることを特徴とする。
(もっと読む)
顔の特徴部位の座標位置を検出する画像処理装置

【課題】本発明は、画像に含まれる顔の特徴部位の位置を検出する処理の効率化・高速化を図ることを目的とする。
【解決手段】注目画像に含まれる顔の特徴部位の座標位置を検出する画像処理装置は、注目画像より時間的に前に座標位置の検出がなされた画像である被検出画像の座標位置の検出に関連する情報である検出情報を記憶する記憶部と、座標位置の検出に用いられる特徴点の注目画像における初期位置を設定するために注目画像上に規定される注目画像規定領域を、注目画像に含まれる顔画像に基づいて検出するか、もしくは、被検出画像における初期位置を設定するために被検出画像上に規定された被検出画像規定領域に基づいて特定するかを検出情報に基づいて、判定する処理判定部と、初期位置に設定された特徴点の設定位置を座標位置に近づけるように更新し、更新された設定位置を座標位置として検出する特徴位置検出部と、を備える。
(もっと読む)
対象物間のネットワーク解析装置
【課題】 撮影された画像に写っている対象物間の連結関係の解析を効率良く行うことが可能な対象物間のネットワーク解析装置を提供する。
【解決手段】 対象物が写っている撮影画像から複数の対象物を選択し、対象物の位置を明示する菱形形状の対象物マーカーを設定する。対象物マーカーは、他の対象物マーカーへのリンクを設定していない状態では、その長軸の1/2の長さの線分と菱形形状により示される(a)。リンク設定処理が開始されると、対象物マーカーの頂点の近接箇所において、リンクが設定される。リンク設定状態では、リンクを設定される側の対象物マーカーは、リンク設定前と変化がないが、リンクを設定する側の対象物マーカーには、短軸となる2頂点を結ぶ線分が追加される(b)。
(もっと読む)
3次元形状測定システムおよび方法
【課題】比較的大型の測定対象物を一括して測定することのできる3次元形状測定システムおよび方法を提供すること。
【解決手段】3次元形状測定システム10は、ワークWの表面に格子パターンを照射し、得られる変形格子パターンをCCDカメラ30で撮影することによりワークの表面形状を測定する3次元形状測定システムであって、前記格子パターンのピッチを分割する複数の位置に格子パターンが照射されるように当該格子パターンの位置を制御する格子パターン位置制御部52と、ワークを照明するため異なる位置に配置された複数の照明装置40と、前記複数の照明装置を選択的に点灯させる照明選択制御部53と、前記格子パターンの前記位置毎に、かつ、前記照明装置が選択的に点灯される毎に前記カメラで撮影された変形格子パターンの画像を合成する画像処理装置60と、を備える。
(もっと読む)
顔特徴点検出装置及びプログラム
【課題】ノイズにより目頭及び目尻部分が隠れている場合でも、顔特徴点として目頭位置及び目尻位置を精度よく検出する。
【解決手段】画像から検出された目頭の第1位置を示す固定の制御点P3、目尻の第1位置を示す固定の制御点P4、上瞼位置候補に対応した制御点P1(第1のパラメータ)、及び下瞼位置候補に対応した制御点P2(第2のパラメータ)により表されるベジエ曲線を第1の瞼形状モデルとし、第1の瞼形状モデルと画像に含まれる瞼の形状とのフィッティング評価値λが最も高いときのP1及びP2を固定した第2の瞼形状モデルにおいて、目頭位置候補を示す制御点P3(第3のパラメータ)、及び目尻位置候補を示す制御点P4(第4のパラメータ)を変更したときのフィッティング評価値λが最も高いときのP3及びP4を目頭の第2位置及び目尻の第2位置として決定する。
(もっと読む)
欠陥検査方法および欠陥検出装置
【課題】被検査物が複雑な形状である場合でも、精度よく欠陥検出をすることができる欠陥検方法および欠陥検出装置を提供することを目的とする。
【解決手段】欠陥検出方法は、被検査物を撮像し、撮像画像データを取得する撮像工程ST1と、エッジ検出工程ST3と、頂点検出工程ST4と、基準検出工程ST6と、欠陥検出工程ST9とを備える。基準検出工程ST6はエッジ追跡方向に沿って順に各頂点のエッジ回転方向を検出した際に、エッジ回転方向の向きが変化する頂点の直前の頂点を基準点として設定し、エッジ追跡方向に沿う基準点間のエッジに対し、後段の基準点におけるエッジ回転方向を基準回転方向として設定し、欠陥検出工程ST9は基準点間のエッジを追跡し、エッジ回転方向が、基準回転方向と異なる点を欠陥点として検出する。
(もっと読む)
検査方法
【課題】測定対象物の歪曲を適切に補償した検査領域の設定方法を提供する。
【解決手段】ステージに測定対象物を配置し、測定対象物に対する基準データを呼び出し、測定対象物に対する測定データを獲得し、測定対象物に対する測定データと測定対象物に対する基準データから少なくとも一つの特徴オブジェクトを選択し、基準データおよび測定データから選択された特徴オブジェクトに対する少なくとも一つの特徴変数をそれぞれ抽出し、特徴変数および定量化した変換公式を用いて測定対象物の変化量を算出し、算出された変化量を補償して検査領域を設定する。
(もっと読む)
画像形成装置およびプログラム
【課題】印刷データを印刷する場合に、各用紙における画像の向きを自動的に修正することができる画像形成装置を提供する。
【解決手段】プロッタ用の制御言語で記述された印刷データを取得するデータ受信部21と、印刷データによる画像において、特定の領域に描画される画像が特定の方向へ向かって描画されるように、印刷データによる画像全体の向きを変更するデータ処理を行うデータ処理部22と、データ処理部22によりデータ処理された印刷データに基づいて画像を媒体上に形成する画像形成部10と、を備える。
(もっと読む)
車両情報抽出プログラム、車両情報抽出装置、車両情報抽出方法
【課題】車両が撮影された画像から車両のボディの領域を抽出する車両情報抽出プログラム、車両情報抽出装置、車両情報抽出方法を提供する。
【解決手段】車両が撮影された画像に基づく第1画像を取得し、第1画像内において、直線成分を検出し、直線成分が複数検出された場合、第1画像内において、直線成分同士の交点を含む所定の大きさの領域である第1領域を検出し、第1画像内において、第1領域以外の領域に基づいて第2領域を検出することをコンピュータに実行させる。
(もっと読む)
医用画像処理装置及び方法、プログラム
【課題】より高い精度で血管を検出すること。
【解決手段】医用画像処理装置100は、取得した画像中の血管候補領域を複数の第1の領域に分割する分割部105と、前記複数の第1の領域のうち、予め定められた血管の太さ以上の太さをもつ第1の領域を、前記血管候補領域とは異なる第2の領域に設定する設定部と、前記第1の領域及び前記第2の領域の各々に隣接する領域が、前記血管候補領域であるか否かに応じて、前記第1の領域及び前記第2の領域の各々が血管であるか否かを判定する判定部と、を備える。
(もっと読む)
相互作用的なライブメッシュの区分けのためのシステム及び方法
解剖学的構造の区分けのためのシステム及び方法であって、一連の体積の画像から、前記解剖学的構造の、頂点及びエッジを含む複数のポリゴンから形成される表面メッシュを生成する区分けアルゴリズムを開始する段階と;バネを前記表面メッシュの前記エッジのそれぞれに割り当て、さらに質点を前記表面メッシュの前記頂点のそれぞれに割り当てる段階と;前記表面メッシュ及び前記解剖学的構造の2Dの表示を含む、再配列された2Dの表示を表示する段階と;前記表面メッシュの表面上の選択された一点に基づいて引きバネを前記表面メッシュに追加する段階と;一つの相互作用の点を通じて前記表面メッシュの一部分を移動させる段階と;を有する。 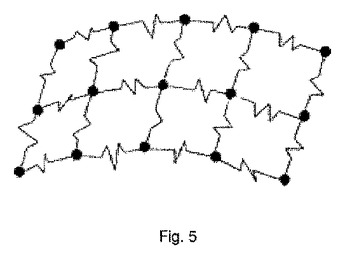 (もっと読む)
(もっと読む)
画像解析装置、画像解析システム、画像解析プログラム、及び、画像解析方法
【課題】 重なっている複数の細胞等の画像から適切な境界線が得られない。
【解決手段】 画像解析装置は、対象領域を含む画像が格納された画像記憶部と、画像記憶部の画像から、対象領域の形状がくびれている部分の対象領域の境界線の区間(結合部)を抽出する結合部検出手段と、検出された結合部内の点を始点として対象領域を切断する切断経路を抽出し、切断経路の評価値を算出し、当該評価値に基づいて選択した切断経路を出力する切断経路生成手段と、切断経路で分割された対象領域の画像を出力する出力手段、を備える。
(もっと読む)
臓器の区分けのための相互作用的なICPアルゴリズム
臓器の画像を区分けするシステム及び方法は、前記臓器の表面モデルを選択する段階と、前記臓器の画像の表面上の複数の点を選択する段階と、前記表面モデルを前記画像上の前記複数の点に変換する段階とを有する。 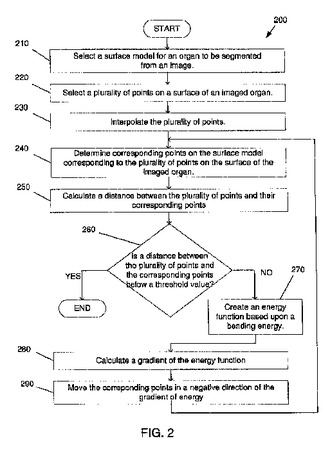 (もっと読む)
(もっと読む)
交通流計測装置および交通流計測方法
【課題】撮像手段(カメラ)の撮像画像を用いて、各種交通流を精度よく計測する。
【解決手段】通過車両を撮像する撮像手段101と、撮像画像から見かけの車両前端及び車両後端を認識する車両端認識手段102と、認識された見かけの車両前端および車両後端を路面上の位置に換算する路面位置換算手段103と、この換算結果に基づいて車両認識を行う車両認識手段104と、該車両認識手段が認識する車両の数を計測し、撮像手段の設置地点を通過する車両の数として認識する通過車両台数認識手段106を備える。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記録媒体
【課題】文字画像を人間の筆順にて区切られる文字ストロークと同様なストロークに精度良く分解する画像処理装置、画像処理方法、プログラム及び記録媒体を提供する。
【解決手段】画像処理装置は、文字画像を細線化する細線化処理手段と、細線化処理手段により細線化された文字画像から端点及び交点を検出する検出手段と、検出手段により検出された交点がストロークの終了か否かを判定する判定手段と、細線化処理手段と検出手段と判定手段とに基づいて、文字画像から文字のストロークを分解して抽出するストローク抽出手段と、を備える。
(もっと読む)
画像処理装置、情報処理装置および画像読取装置
【課題】連結成分を、さらにその連結成分に含まれる描画要素の集団に分類し、集団毎に描画要素を扱う技術を提供する。
【解決手段】ラスター画像データG0は、取得手段110によって取得され、画像領域区切手段111によって画像領域ごとに区切られる。判定手段112は、区切られた画像領域に描かれる描画色の数や切替る回数などに基づいて、その画像領域をベクトル化すべきか否かを判定する。ベクトル情報生成手段113は、判定手段112の判定結果に応じて画像領域に対しベクトル化を行い、その画像領域に対応する単層ベクトル画像データG1を出力する。分類条件指定手段114は、複数の分類条件をその順位に沿って順次、指定する。分類手段115は、分類条件指定手段114によって指定された分類条件に従って、描画要素を1又は複数の集団に分類する。この分類により、階層を有する多層ベクトル画像データG2が生成される。
(もっと読む)
ヘッドマウントディスプレイ
【課題】同一の動作を繰り返す作業を行う際に、作業者の操作負担を軽減し、また正確に繰り返し動作の回数を計測でき、さらに容易且つ迅速に繰り返し動作の回数が確認できるようにすること。
【解決手段】ヘッドマウントディスプレイに繰り返し動作の回数を表示する。具体的には、CCDセンサで繰り返し動作を時分割して、それら撮像画像に基づいて繰り返し動作を認識する(S15)。また繰り返し動作がなされる空間をCCDセンサで逐次撮像する(S16)。それら複数の撮像画像から示される対象動作と、S15にて認識された繰り返し動作とを比較することによって、その対象動作が繰り返し動作であるかを判断する(S17)。対象動作が繰り返し動作であると判断された回数を繰り返し動作の回数として計測する(S18)。そして、S18にて計測された繰り返し動作の回数を表示する(S20)。
(もっと読む)
肌色測定装置、肌色測定プログラム、メイクアップシミュレーション装置及びメイクアップシミュレーションプログラム
【課題】環境光の影響を除去して撮影したユーザの顔の画像から正確にユーザの顔の肌色を測定することを目的とする。
【解決手段】ユーザの顔の肌色を測定する肌色測定装置1であって、環境光の影響を除去できるシャッタ速度で肌色測定用画像を撮影すると共に、環境光の影響を受けるシャッタ速度で表示用画像を撮影する撮影手段14と、撮影手段14のシャッタ動作に連動して発光するストロボ手段16と、撮影手段14が撮影したストロボ光の影響を受けた肌色測定用画像からユーザの顔の肌色を測定する測定手段と、測定手段による測定結果を、撮影手段14が撮影したストロボ光及び環境光の影響を受けた表示用画像と共に表示する表示手段13とを有することにより上記課題を解決する。
(もっと読む)
ウェハー上の欠陥検出
ウェハー上の欠陥を検出するための方法およびシステムが提供される。 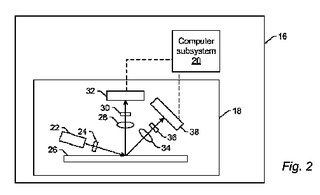 (もっと読む)
(もっと読む)
ロボットシステムおよびロボットの制御方法
【課題】 センサ座標系を気にせず、ワーク寸法の入力も必要とせずに、計測を含む把持動作の教示、再生をできるようにする。
【解決手段】 ロボット制御装置102において、手動操作でグリッパ107を把持位置へ移動して教示位置として記録し、前記教示位置を中心としてあらかじめ決められた広さを計測範囲として決定し、前記計測範囲をワークの形状計測手段により計測したワーク形状をマスタデータとして前記教示位置と関連づけて記録する。前記マスタデータと計測データを比較する。マスタデータに対する計測データの3次元の位置姿勢を計算して修正量とする。前記修正量にしたがって把持位置を修正し、グリッパ107を把持位置へ移動する指令を生成する。
(もっと読む)
121 - 140 / 396
[ Back to top ]