
Fターム[5B057DC34]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074) | 相関値を用いるもの (750)
Fターム[5B057DC34]に分類される特許
241 - 260 / 750
車両判別装置及び車両判別方法
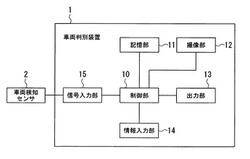
【課題】運転者に快適に通過してもらうことができ、迅速かつ高精度に特定分類車両を判別することができる車両判別装置を提供すること。
【解決手段】車両のナンバープレートを撮像しモノクロ画像データを取得する撮像部と、撮像部によって取得されたモノクロ画像データにおけるナンバープレートの輝度情報と、モノクロ画像データにおけるナンバープレートの位置情報とに基づいて、撮像領域における配光中心を演算する配光中心演算部と、判別対象のモノクロ画像データにおけるナンバープレートの位置情報と、配光中心演算部によって演算された配光中心とに基づいて、判別対象のモノクロ画像データにおけるナンバープレートの輝度情報を補正する補正部と、補正部によって補正された判別対象のモノクロ画像データにおけるナンバープレートの輝度情報に基づいて、特定分類車両を判別する判別部とを備えることを特徴とする。
(もっと読む)
車載用物体検知装置

【課題】画像処理の負荷低減と非立体物への誤検知低減を両立する車載用物体検知装置を提供する。
【解決手段】自車70から物体Pまでの距離と自車70の前方画像60に基づいて処理候補Qを選定する。そして、その選定した処理候補Qの距離と前方画像60とに基づいて処理候補Qが予め設定された所定の立体物P1であるかを判定する。これにより、処理負荷の大きい立体物P1を判定するための処理の実行回数を減らし、装置3の処理負荷を低減する。そして、高精度の画像を画像処理することによって立体物P1を判定し、誤検知を低減する。
(もっと読む)
車両周辺監視装置
【課題】対象物が動いている場合でもこの対象物の位置を高精度で測定することができる装置を提供する。
【解決手段】車両周辺監視装置10によれば、指定期間ΔTだけ離れている2つの時刻の間での対象物領域のサイズの変化率Rate(t)が算出される。指定期間ΔTは対象物が同一であることが確認されうる程度に画像における対象物の形状または姿勢が類似するまたは一致するように定められた時間である。このため、画像における対象物の姿勢または形状が指定期間ΔTまたはその近傍範囲の時間を周期として変化するように動いている同一対象物のサイズの変化率Rate(t)が高精度で算出される。そして、対象物領域の指定期間ΔTにわたるサイズの変化率Rate(t)を基礎とすることにより、対象物が動いている場合でも車両1から対象物までの距離または位置が高精度で測定されうる
(もっと読む)
移動体追跡装置及びその方法
【課題】複雑な処理を行うことなく、精度良く移動体の追跡が行える移動体追跡装置を提供する。
【解決手段】既知の位置関係にある少なくとも2台の撮影手段1a、1bと、撮影された画像を一定の時間間隔で取り込み手段2を介して取り込む信号処理装置3とを有し、取り込まれた前記画像が保存される画像保存部4と、対応点を求める対応点計測手段5と、対応点が正確に求められているか否かを判定する対応点検出判定手段6と、対応点が検出された場合に画像中の移動体の3次元位置を計測する3次元位置計測手段7と、対応点が検出できない場合には次の画像入力を待ち、対応点が検出できなかった前後の時間の前記画像を用いて移動体が存在するかを確認し、存在する場合には前後の画像から3次元位置を推定する3次元位置推定手段8と、3次元位置計測手段又は3次元位置推定手段で求められた3次元位置より前記移動体の軌跡を求める移動体追跡手段9と、を備える。
(もっと読む)
車両周辺監視装置
【課題】対象物が動いている場合でもこの対象物の位置を高精度で測定することができる装置を提供する。
【解決手段】車両周辺監視装置10によれば、対象物領域A(k)の一部領域としての局所領域B(k)のサイズの変化率Rate(k)が算出される。具体的には、先時刻k−1における局所領域B(k−1)が拡大されて得られた拡大局所領域EB(γi)と、先時刻kよりも後の後時刻k−1における局所領域B(k)との相関度が最高になったときの当該拡大率が局所領域B(k)のサイズの変化率Rate(k)として算出される。局所領域B(k)は対象物のうち動きが少ない部分が存在する画像領域、すなわち、対象物の動きによるサイズの変動が最小限に抑制されている画像領域である。そして、当該変化率Rate(k)を基礎とすることにより、対象物が動いている場合でも車両1から対象物までの距離Z(k)または位置P(k)が高精度で測定されうる。
(もっと読む)
撮像位置判定方法及び撮像位置判定装置
【課題】カメラの移動や撮像位置の情報を出力できる機能を有しない一般的なカメラでもシーケンシャル撮像動作における撮像位置の判定を行うことができる撮像位置判定方法及び撮像位置判定装置を提供する。
【解決手段】カメラ10がシーケンシャル撮像動作を行う複数の撮像位置のうちいずれかに静止していることを判定し、カメラ10が静止していると判定した場合、その時の撮像位置にてカメラ10で撮像された画像と予め保存している背景参照画像とを比較し、両画像間の相関演算値により現在の撮像位置を判定する。これにより、カメラ10の移動や撮像位置の情報を出力できる機能を持たない一般的なカメラでもシーケンシャル撮像動作における撮像位置の判定を行うことができる。
(もっと読む)
画像検査装置
【課題】パターン形状に歪みがあり、エッジ強度にバラつきがある画像においても、的確なマッチング位置が得られる統一的なテンプレート・マッチング手法を提供する。
【解決手段】テンプレート・マッチングで得られた正規化相関マップに重心距離フィルタを施して得られた上位候補の各位置周辺における相関値寄与率マップを作成し、これらの相関値寄与率マップから補正強度画像を作成し、補正強度画像に基づいて輝度補正し、各候補位置周辺で再度局所的にマッチングを行い、新たに得られた候補位置と相関値によって候補をソートしなおす。これにより、パターン形状に歪みがあり、エッジ強度にバラつきがある画像においても、統一的に的確なマッチング位置を得ることができる。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、および、電子機器
【課題】画像の統合枚数により、画像の領域ごとに画質の改善度合いが異なる場合において、統合画像の高画質化処理を行う技術を提供する。
【解決手段】画像処理装置は、複数枚の画像の位置合わせ処理を行う位置合わせ部102と、位置合わせ部102による位置合わせ処理の結果に基づいて、複数枚の画像を統合して統合画像を生成する画像統合部104と、画像統合部104で統合された統合画像において統合枚数の異なる領域ごとの統合枚数情報、および、統合画像の画像データを用いて、統合画像の高画質化処理を行う信号処理部(高画質化処理部)106とを備える。
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラム、撮像装置
【課題】顔画像の目などの局所的に暗い構造を、エッジとして的確に検出することができる方法を提供すること。
【解決手段】画像処理方法において、複数の画素からなる画像を取得し、取得した画像に基づき局所的に周辺より画素値がへこんでいる凹構造のエッジを検出し、検出した凹構造のエッジに基づきエッジ画像を生成する。
(もっと読む)
画像判読支援方法および装置
【課題】
正確な画像判読結果が容易に得られる画像判読支援方法および装置を提供する。
【解決手段】
観測センサ102から得られるリモートセンシング画像を判読して得られた、複数個の同一種の地物に対して、判読支援装置112の自動分類手段113は、分光特性、放射特性、散乱特性、テクスチャ、形状のいずれか、あるいは、これらの組み合わせによって自動分類を行い判読結果データベース106に蓄積する。判読結果修正候補抽出手段107は、自動分類結果である尤度の比較を行うことで判読結果修正候補を抽出する。この判読修正候補に対して再判断を行い、判読結果更新手段110により、判読結果データデース106を更新する。これにより、効率よく判読作業の修正作業を行うことができる。
(もっと読む)
マスター画像選択方法
【課題】パターンマッチングによる複数種類の組付部品の合否判定に共通に使用でき、かつ信頼性の高い合否判定ができるマスター画像の選択を可能とする。
【解決手段】1つの種類の撮影画像(組付部品)のグループにおける各撮影画像の相関値を算出してその相関値の平均値X、分散値σx及び相関値の最下限値Xmin(=X−3*σx)を算出し、他の種類の部品グループ対しても同様に相関値の平均値Y、分散値σyを算出し、また最上限値Ymax(=Y−3*σy)を算出する。そして、各々最下限値Xminと最上限値Ymaxとの差(=Xmin−Ymax)を算出し、その差が最大となるときの画像をマスター画像に選択するようにした。最下限値Xminと最上限値Ymaxの算出に3σの考え方を導入して組付部品のばらつきが考慮された信頼性の高い合否判定を可能とした。
(もっと読む)
画像処理システム、画像処理方法、およびプログラム
【課題】特徴領域の画像が見やすい監視画像を提供することができる画像処理システムを提供すること。
【解決手段】画像処理システムは、動画を取得する画像取得部と、動画に含まれる複数の動画構成画像における特徴領域の位置を示す情報を取得する特徴領域情報取得部と、特徴領域情報取得部が取得した情報が示す位置に基づいて、複数の動画構成画像にそれぞれ含まれる特徴領域の画像のそれぞれを縮小または拡大して略同一の大きさの表示画像をそれぞれ生成する画像生成部とを備える。
(もっと読む)
疵学習装置、疵学習方法、及びコンピュータプログラム
【課題】疵の判別性能を従来よりも向上させる。
【解決手段】第1群の特徴量f1〜f50について、第1群の特徴量f1〜f50の値の組と疵種「C1」、「C2」とを対応付けるための複数の部分特徴量空間を生成して学習モデルAを形成する。次に、第2群の特徴量f51〜f100のデータの夫々について学習モデルAを適用する。この結果、第2群の特徴量f51〜f100のデータのうち、学習モデルAでは疵種「C1」、「C2」を特定できない疵データを棄却クラスのデータとする。そして、学習モデルAでは疵種「C1」、「C2」を特定できない特徴量について、当該特徴量の値の組と疵種「C1」、「C2」とを対応付けるための複数の部分特徴量空間を生成して学習モデルBを形成する。
(もっと読む)
操作対象の切替装置
【構成】 マルチウィンドウシステム10はコンピュータ18,20を含み、コンピュータ18,20には、それぞれディスプレイ22,24が接続される。また、コンピュータ18,20には、切替器16を介して、キーボード26およびマウス28が接続される。ユーザの顔画像はカメラ14で撮影され、この顔画像に基づいて視線サーバ12は、ユーザの顔方向および視線方向を推定し、カメラ14、ディスプレイ22、ディスプレイ24およびユーザの位置関係を取得する。これらの情報を受けて、コンピュータ20は、ユーザがディスプレイ18,20を見ているか否かを判断し、見ているディスプレイ18,20を特定する。そして、コンピュータ20は、切替器16によって、ユーザが見ているディスプレイ22,24に接続されるコンピュータ18,20をアクティブにする。
【効果】 視線により操作対象のコンピュータを切り替えることができる。
(もっと読む)
被災監視装置及び被災監視方法
【課題】河川管理設備のように特徴的な形状を持たない監視対象エリアの被災状況を簡単かつ正確に検出可能とする。
【解決手段】地震が発生した場合に、地震発生直後の監視対象エリアを監視カメラCMにより撮像し、その撮像画像データをその明度に応じてグレースケール画像に変換したのちしきい値V0 に従い二値画像データに変換し、この変換された二値画像データから監視対象エリアの凹部に対応する「黒画素」を抽出してその面積Mを算出する。そして、この算出された面積値Mとメモリ26に記憶された参照値M0との差分値M−M0 を算出し、この算出された差分値M−M0 をメモリ27に記憶されたしきい値dと比較し、M−M0 >dの場合に河川管理施設の監視対象エリアが被災したと判定して、警報メッセージと上記地震発生直後の撮像画像データを監視センタCSへ送信する。
(もっと読む)
顔状態評価方法、顔状態評価装置および顔状態評価プログラム
【課題】精度よく顔の状態を評価する。
【解決手段】画像データが示す画像に含まれる顔の状態を評価する顔状態評価方法において、まず、前記画像から少なくとも1つの顔および当該顔に含まれる左右の目を検出する(ステップS140)。次に、当該検出した左右の目のうち輪郭の検出に適する方を選択する(ステップS220)。当該選択した方の目の輪郭を検出する(ステップS250)。そして、当該検出した前記輪郭に基づいて前記顔の状態評価を高精度に行う(ステップS470)。
(もっと読む)
画像における顔領域の検出
【課題】画像における顔領域検出処理の高速化を図ることを可能とする。
【解決手段】画像処理装置は、顔領域の検出結果の用途を特定する用途特定情報を取得する用途特定情報取得部と、用途特定情報に基づき顔領域に表されるべき顔の角度に関する条件を設定する条件設定部と、設定された条件に適合する顔の画像に対応する顔領域を検出する顔領域検出部と、を備える。
(もっと読む)
車両用環境認識装置および先行車追従制御システム
【課題】ステレオ撮像手段から出力された一対の画像中にスミアが発生しているか否かを的確に判定することが可能で、処理を簡易かつ的確に行うことが可能な車両用環境認識装置を提供する。
【解決手段】車両用環境認識装置1は、自車両Aの周囲を撮像して基準画像T等を出力するステレオ撮像手段2と、基準画像Tの各画素ブロックPBごとにステレオマッチング処理を行って視差dp等を対応づけるステレオマッチング手段6と、視差dp等に基づいて基準画像T中から先行車両Vahを検出する先行車両検出手段11と、無限遠を含む遠方距離に対応する遠方視差閾値以下の視差dp等が算出された画素ブロックPBが属する基準画像Tの縦方向の画素列Dnの各画素の輝度値p1ijの探索を行い、所定の輝度値Pth以上の輝度値の画素の数が画素列Dnの全画素数の所定の割合以上存在する場合にスミアが発生していると判定するスミア判定手段12と、を備える。
(もっと読む)
画像処理方法、画像処理装置、及び画像処理プログラム
【課題】グループ化された類似画像において人物の入れ代わりを速やかに判別する。
【解決手段】複数の画像データから所定の画像データを選択するにあたり、先ず互いに類似する複数の画像データからなる群を取得する。次いで、同一の前記群に属する各画像データが示す画像を縮小したサムネイル画像において、そのサムネイル画像に含まれる顔の数と、顔器官の位置及び色を取得する。そして、同一の前記群に属する2つのサムネイル画像において、前記顔の数が異なる場合にはその画像を共に選択する。また、前記顔の数が同じである場合には前記顔器官の位置及び色を比較することで人物の入れ代わりを判別し、その人物が入れ代わっている場合にはその画像を共に選択する。
(もっと読む)
画像における顔領域の検出
【課題】検出された顔領域について顔領域の用途に適するか否かを容易に識別することを可能とする。
【解決手段】画像処理装置は、顔領域の検出結果の用途を特定する用途特定情報を取得する用途特定情報取得部と、用途特定情報に基づき顔領域に表されるべき顔の角度に関する条件を設定する条件設定部と、顔領域を検出する顔領域検出部と、検出された顔領域を条件に適合する適合顔領域と条件に適合しない非適合顔領域とに選別する顔領域選別部と、検出された顔領域を適合顔領域と非適合顔領域とが識別可能なように表示する表示部と、を備える。
(もっと読む)
241 - 260 / 750
[ Back to top ]