
Fターム[5B057DC34]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074) | 相関値を用いるもの (750)
Fターム[5B057DC34]に分類される特許
181 - 200 / 750
白線検出装置
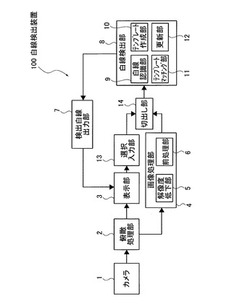
【課題】演算量を低減させることができ、かつ、誤検出を防止することができる白線検出装置を提供する。
【解決手段】カメラ1による撮像画像を俯瞰処理部2が俯瞰画像に変換し、俯瞰画像は区分線により複数の区画に区分されて表示部3に表示される。そして、複数の区画のうち一部の区画を選択する操作が選択操作部13に入力されると、切出し部14が、画像処理部4において画像処理が行われた後の画像全体から、選択された区画に対応した画像部分を切り出す。さらに、白線認識部9が、この画像部分について白線認識を行ない、テンプレート作成部10が認識された白線に基づいてテンプレートを作成し、テンプレートマッチング部11が画像全体についてテンプレートに表された白線に対して平行な白線の検出を行ない、検出白線出力部7により検出され白線が表示部3に表示される。
(もっと読む)
ロボットハンド

【課題】 精度良く物体を選別し、物体を把持することを提供することにある。
【解決手段】 支持部40と、支持部40に設けられ、物体100を把持するための対向する第1及び第2の把持部110と、第1及び第2の把持部110にそれぞれ設けられ、物体100に光を照射するための対向する第1及び第2の光源90と、支持部40に設けられ、且つ、第1及び第2の把持部110を含む平面によって挟まれた領域に設けられ、且つ、光によって照射された物体100を撮像して物体100の画像を取得する撮像装置50と、撮像装置50に接続され、且つ、撮像装置50で取得した画像を処理する画像処理装置とを備えたことを特徴とするロボットハンド。
(もっと読む)
顔を相関させることによるデジタル画像の編成
画像を編成するコンピュータ実施方法は、人間の顔の表現を含む画像を受け取り、人間の顔を含む1つ以上のプロフィール画像に関連した記憶された顔プロフィールに人間の顔が対応する見込みを示す相関値を発生し、受け取った画像及び発生された相関値を評価して、その評価の結果に基づき、画像がその記憶された顔プロフィールに対応するかどうか決定し、受け取った画像を記憶された顔プロフィールに関連付け、そしてその関連付けの指示を記憶する、ことを含む。 (もっと読む)
画像高品質化方法、装置およびプログラム
【課題】適合度計算の精度を向上させる画像の高品質化方法、装置およびプログラムを提供する。
【解決手段】 入力画像に単位領域を割り当てる割り当てステップと、前記単位領域を高品質化するための輝度成分を有する複数のパッチ候補を前記単位領域毎に割り当てるパッチ候補割り当てステップと、前記パッチ候補の適合度を計測するための計測領域を、前記単位領域の内部に割り当てる計測領域割り当てステップと、割り当ての異なる前記計測領域の少なくとも一部を重ね合わせ、重ね合わせた部分領域の輝度パターンの類似度から前記割り当ての異なる複数のパッチ候補の適合度を算出する適合度算出ステップと、前記適合度が小さくなるようなパッチ候補を前記単位領域のパッチとして選択する選択ステップと、前記パッチを用いて前記単位領域を高品質化した画像を生成する画像生成ステップとを有する画像高品質化方法。
(もっと読む)
広告効果測定装置
【課題】顔検出処理の効率を向上できる、広告効果測定装置を提供する。
【解決手段】広告効果測定装置10は、広告媒体の前方を撮像して画像を生成するカメラ12、およびカメラ12によって生成された画像から人物の顔を検出するコンピュータ16を含む。コンピュータ16は、複数の画像それぞれについて全体からテンプレートマッチングによって人物の顔を検出する。そして、その結果得られる人物の顔の写り込み範囲に基づいて変動検出範囲を設定する。コンピュータ16は、所定期間が経過するまでは画像全体からの検出と変動検出範囲内での検出とを交互に行う。コンピュータ16は、所定期間が経過すれば、それまでに得られた写り込み範囲に基づいて確定検出範囲を設定し、確定検出範囲内で画像から人物の顔を検出する。
(もっと読む)
画像処理装置および画像処理方法、ならびに、撮像装置
【課題】特定の被写体を適切に追跡することができるようにする。
【解決手段】先ず、入力画像に対して顔検出を行い(S402)、検出された顔領域を基準画像として登録する。次のフレーム画像に対して基準画像によるマッチング処理を施し、相関度の高い部分画像を抽出する(S405)。追跡を継続するか否かを判定する条件が設定されていれば(S406)、その条件を満たしているか否かが判定され(S409)、満たしていればマッチング処理による部分画像で基準画像が更新される(S403)。判定条件が設定されていなければ、マッチング処理の信頼度が算出され、閾値と比較される(S407、S408)。信頼度が閾値以上であれば、マッチング処理による部分画像で基準画像が更新される(S403)。信頼度が閾値未満であれば、判定条件が設定され(S409)、その条件を満たしているか否かが判定される(S410)。
(もっと読む)
自動販売機
【課題】マッチングの演算回数を減らして効率的に利用者の顔検出処理を行える、自動販売機を提供する。
【解決手段】自動販売機のコンピュータは、カメラで得られた画像に対してテンプレートマッチングを行い利用者の顔を検出する。コンピュータは、顔検出時のパッチの下端がN回連続で第1水平線以上のとき、それ以降の画像の顔探索範囲を上部範囲に限定する。顔検出時のパッチの上端がN回連続で第3水平線以下のとき、それ以降の画像の顔探索範囲を下部範囲に限定する。M×N回顔検出したにもかかわらず、上記のいずれの条件をも満たさないとき、(γ+δ3+b)≦Y/2であれば、それ以降の画像の顔探索範囲を中央範囲に限定し、一方、(γ+δ3+b)>Y/2であれば、それ以降の画像の顔探索範囲を全範囲とする。
(もっと読む)
瞼検出装置、瞼検出方法及びプログラム
【課題】光環境の影響をうけないで、瞼を精度よく検出することができる装置を提供する。
【解決手段】カメラ2は対象者の顔を連続的に撮影し、瞼検出装置10の制御部14はその顔画像を取得し、画像メモリ12に格納する。制御部14は、顔画像から瞼探索領域を判別し、この瞼探索領域内からエッジを抽出して、連結するエッジ(エッジグループ)毎にラベルを付与する。そして、制御部14は、ラベリングしたエッジグループの経時的な動きの変化から同一のエッジグループを判別し、同一のエッジグループ同士に同一のラベルを付与する再ラベリングを行う。そして、制御部14は、このようにしてラベリングしたエッジグループの経時的な動きの変化から、上瞼に相当するエッジグループを検出して、検出した上瞼に相当するエッジグループの下方の所定領域から、下瞼に相当するエッジグループを検出する。
(もっと読む)
画像処理装置
【課題】 同じ入力色に対して同じ色に再現できる画像処理装置を提供する。
【解決手段】 前回入力された第1画像データの第1画像色域情報を記憶する第1情報記憶部と、今回入力された第2画像データの第2画像色域情報を算出する画像色域解析部と、第2画像データと第2画像色域情報を記憶する第2情報記憶部と、第1画像色域情報と第2画像色域情報の類似度を求める類似度算出部と、類似度が高い場合は、第1画像色域情報を色域写像に使用する入力装置の色域とし、類似度が低い場合は、第2画像色域情報を色域写像に使用する入力装置の色域とする色変換色域決定部と、色域写像に使用する入力の色域と出力装置の色域に基づいて、第2画像データの色を出力装置の色域内に写像した色域写像画像データを生成する色域写像部とを有する。
(もっと読む)
カメラ
【課題】カメラの操作者や画像の撮影者の役割等を考慮しつつ、さらに、プライバシーの保護や画像の検索性を考慮して、最適な画像表示を可能としたカメラを提供すること。
【解決手段】画像の撮影がなされた場合に、画像群決定部108は、撮影された画像における特定の顔の有無、顔の数、笑顔度、撮影者等の情報を画像管理ファイルに記録する。カメラ100の画像を画像表示装置200に送信するに際し、代表画像選択部109は、操作者特定部110によってカメラ100の操作者を特定し、特定した操作者の情報と画像管理ファイルに記録された情報とから、撮影された画像が属する画像群における代表画像を決定する。
(もっと読む)
撮像装置
【課題】撮影中の視野を動画像としてモザイク画像上の適切な位置に表示させる際に、フレーム画像の位置合わせに失敗したことを容易に認識することができる撮像装置を提供する。
【解決手段】カメラによって撮影された複数の静止画像を張り合わせてモザイク画像を生成するモザイク画像生成手段と、フレーム画像及びモザイク画像から特徴量を抽出する特徴量抽出手段と、特徴量の比較によってフレーム画像及びモザイク画像間の相対位置を判定する相対位置判定手段と、相対位置の判定結果に基づいてフレーム画像のモザイク画像に対する表示位置を更新し、モザイク画像上に動画像を表示するライブ画像表示手段により構成される。ライブ画像表示手段は、フレーム画像の位置合わせに成功した場合に、上記表示位置を相対位置に応じて変更し、位置合わせに失敗した場合に、上記表示位置を変更せず、位置合わせに成功した最後のフレーム画像の位置付近に固定する。
(もっと読む)
ステレオカメラユニット及びステレオマッチング方法
【課題】ステレオマッチングにおける相関演算を高速処理できるステレオカメラユニット及びステレオマッチング方法を提供する。
【解決手段】このステレオカメラユニット10は、k(k>1)の基線長比を持つ少なくとも2組の基準画像及び参照画像を取得する複数台のカメラと、基線長の短い組の基準画像及び参照画像にウインドウをそれぞれ設定し、両ウインドウで相関演算を実行することで基線長の短い組における視差ds(u,v)を算出する予備相関実行部12と、予備相関実行部12からの視差ds(u,v)をk倍したk×ds(u,v)の視差を生じる条件で制限される範囲の相関演算を短い組と同じ画像位置の基線長の長い組の基準画像及び参照画像に対して実行する相関実行部14と、を備え、相関実行部の相関演算結果から導き出される視差dl(u,v)を出力する。
(もっと読む)
歩行者検出表示システム
【課題】歩行者検出表示システムにおいて、歩行者の像の誤検出を低減する。
【解決手段】車両の進行方向の所定領域を赤外線画像として撮像する赤外線カメラ10と、得られた赤外線画像に基づいて歩行者を表す像を検出し、歩行者像の位置に矩形枠を付して出力する歩行者検出装置20と、これを表示する画像表示装置50とを備え、歩行者検出装置20は、コントラストが高められ、エッジが強調された後の画像に対して、縦横エッジ低減部23が、水平エッジおよび鉛直エッジを低減し、得られた画像に対して、相関値算出部24が、テンプレート記憶部27に記憶された歩行者テンプレートとのマッチングを行って、歩行者テンプレートとの間での相関値を求めることで、画像中の歩行者の像の誤検出を低減する。
(もっと読む)
作業対象物の位置検出方法および位置検出装置
【課題】作業対象物が撮像されたボケ画像から作業対象物の位置を検出する。
【解決手段】作業対象物Wが撮像されたボケ画像Bから前記作業対象物Wの位置を検出する位置検出方法であって、前記作業対象物Wのモデルに第1のアフィン変換係数A0でアフィン変換を施し仮定元画像Pを生成する仮定元画像生成工程S2と、ボケ特性を示す点拡散係数を求める点拡散係数算出工程S4と、前記仮定元画像Pに前記点拡散係数との畳み込み演算を行い前記仮定元画像の合成ボケ画像Baを生成する合成ボケ画像生成工程S3と、前記合成ボケ画像Baと前記ボケ画像Bとを比較する画像比較工程S7と、比較され抽出された差異により前記第1のアフィン変換係数A0を修正して第2のアフィン変換係数A1を求めるアフィン変換係数修正工程S8と、前記第2のアフィン変換係数A1より前記作業対象物Wの位置を検出する位置検出工程S10とを有する。
(もっと読む)
立体物出現検知装置
【課題】低コストで立体物の出現を迅速且つ正確に検知することができる立体物出現検知装置を提供する。
【解決手段】立体物出現検知装置は、車両20に搭載されたカメラ21で撮像した俯瞰画像30に基づいて車両周辺における立体物22の出現を検知するものであり、俯瞰画像30から俯瞰画像30上でかつカメラ21の視線方向33に直交する方向36、37の直交方向特徴成分46、47を抽出し、その抽出した直交方向特徴成分46、47の量に基づいて立体物22の出現を検知する。これにより、例えば、日照の揺らぎや、影の移動等の偶発的な画像の変化を、立体物の出現として誤検知するのを防ぐ。
(もっと読む)
文字画像補正装置及び文字画像補正方法
【課題】元の文字画像から歪んで得られた文字画像を補正する際に、元の文字画像と撮影された文字画像との既知の対応点を必要とせず、文字の傾き及び歪みを品位良く補正できる文字画像補正装置及び文字画像補正方法を提供することを目的とする。
【解決手段】撮影した画像から文字領域を検出する文字領域検出部1と、文字領域検出部1によって検出された文字領域から文字列の傾斜角を検出する傾斜角検出部3と、傾斜角が所定の角度になるように文字列傾斜角を補正する傾斜角補正部4と、傾斜角補正部4によって傾斜角が補正された文字列において、文字のアスペクト比を検出する文字列アスペクト比検出部5と、傾斜角が補正された文字列の文字のアスペクト比を補正するアスペクト比補正部9と、を備える。
(もっと読む)
3次元ずれ量計測方法
【課題】アーチファクトの影響を受けず、短時間でかつ正確に、レジストレーションを行う。
【解決手段】基準立体画像を構成する2次元の投影画像をデータベースDB1に保存する。比較対象立体画像を構成する2次元の投影画像をデータベースDB2に保存する。データベースDB1,DB2に保存されている2次元の投影画像から基準立体画像と比較対象立体画像との間のX,Y,Zの3軸の回転ずれ量(Δθ,Δφ,ΔΨ)および平行ずれ量(Δx,Δy,Δz)を求める。
(もっと読む)
相関処理装置及びその相関処理装置で読みとり可能な媒体
【課題】
テクスチャサイズの設定又はウインドウの位置に自由度が求められた場合において、テクスチャとウインドウの相関関係を求める計算に対して、効率的な並列処理が可能な構成を有する画像処理装置を提供することを目的とする。
【解決手段】
探索したい画像の第1画像ピクセル値と、部分画像の第2画像ピクセル値とを演算する機能を有するN個(Nは正の整数)の演算回路と、M個(MはNより小さい正の整数)の構成要素を有する矩形パタンであって、探索したい画像を矩形パタンによって分割したときの分割数が最小となるような矩形パタンを選択する矩形パタン選択回路と、N個の演算回路の内、M個の演算回路を活性化するとともに、M個の演算回路によって演算が行われるM個の第1画像ピクセル値及びM個の第2ピクセル値を特定する制御回路と、M個分の演算回路によって得られた演算結果を積算する積算器と、を備える相関処理装置を提供する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】一対の画像を比べて異なる部分を出力画像面上で位置ずれとして認識できるようにする画像処理において、画像サイズが異なる場合のずれ検出を可能にする。
【解決手段】ヒストグラム生成部102は、入力された一対の画像から外接矩形サイズ取得部101で取得した、画像内の文字とみなせる画素連結成分に外接する矩形のサイズ(幅・高さ)のヒストグラムを各画像で生成する。サイズ差算出部103は、前記ヒストグラムから最頻値を取得し、取得した最頻値の差を一対の画像間の変倍率として算出する。位置ずれ検知部104は、算出された一対の画像間の変倍率を用いて画像を変倍し、一対の画像間のサイズ差を無くし、変倍後の一対の画像を比較することにより両画像の位置ずれを検知する。位置ずれ表示用画像出力部105は、位置ずれ検知データを処理対象の画像面上に表す位置ずれ表示用画像を生成し、出力する。
(もっと読む)
3次元形状生成装置
【課題】被写体の薄い部分が良好に再現されると共に視体積交差法を適用して得られる3次元形状を大きく崩すことなく被写体の3次元形状を良好に再現する。
【解決手段】多視点カメラ画像からシルエット画像を生成する手段2と、生成されたシルエット画像について視体積交差法を適用し、被写体の近似された3次元形状モデルである各種ソリッドモデルを生成する手段3と、カメラ画像間の相互相関値を演算する手段30と、生成されたソリッドモデルについて相互相関値を用いて最大フロー/最小カットアルゴリズムを適用して被写体の3次元形状モデルを生成する手段40とを具える。さらに、シルエット画像とソリッドモデルとに基づいてシルエット拘束値を生成する手段10から出力される値を用いて相互相関値に対して重み付けを行い、重み付けされた相互相関値を用いて最大フロー/最小カット演算を行う。
(もっと読む)
181 - 200 / 750
[ Back to top ]