
Fターム[5B057DC34]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074) | 相関値を用いるもの (750)
Fターム[5B057DC34]に分類される特許
281 - 300 / 750
情報識別装置、情報識別方法、プログラム及び記録媒体
【課題】本発明は、画像データに埋め込まれた関連情報を識別する情報識別装置、情報識別方法、プログラム及び記録媒体に関する。
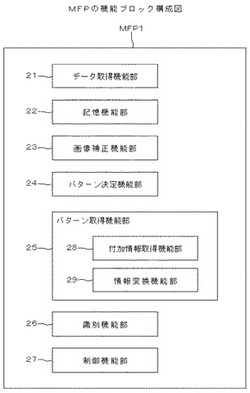
【解決手段】MFP1は、パターン決定機能部24が、複数のパターンのうち一部のパターンのみを画像データから取得する取得パターンとして決定し、パターン取得機能部25が、該決定したパターンを識別対象の画像データから取得して、識別機能部26が、該取得したパターンから該関連情報を識別する。したがって、取得したパターンから関連情報を復元することなく、埋め込まれた関連情報を識別することができる。
(もっと読む)
対応点探索装置および該方法

【課題】本発明は、対応点探索の演算領域が画像領域と画像外領域とに亘って設定される場合でも誤対応を低減することができる対応点探索装置および該方法を提供する。
【解決手段】本発明の対応点探索装置は、所定の時点に取得された画像に基づいて所定の時点と異なる予測時点における画像を予測画像として生成する画像予測部21と、予測画像と予測時点に取得された画像とを合成することによって合成画像を生成する画像合成部22と、2つの画像のうちの一方を基準画像とすると共に他方を参照画像とする場合に、基準画像の注目点に対応する参照画像の対応点を探索する対応点探索部23とを備え、対応点探索部23は、基準画像に対応する合成基準画像がある場合には基準画像に代えて合成基準画像を用いると共に、参照画像に対応する合成参照画像がある場合には参照画像に代えて合成参照画像を用いる。
(もっと読む)
距離計測装置及び距離計測方法
【課題】距離の測定対象となる対象物の大きさに関わらず、対象物までの距離を安定して算出する。
【解決手段】抽出部20は、基準カメラ110から順次入力される入力画像を基準画像、参照カメラ120から順次入力される入力画像を参照画像とし、各基準画像から前方車体が撮影されている領域である物体領域を抽出する。面積算出部30は、抽出部20により抽出された物体領域の面積を算出する。処理変更部40は、面積算出部30により算出された物体領域の面積が小さくなるにつれて、視差分解能を高くする探索処理を選択する。対応点探索部50は、抽出部20により抽出された物体領域内に注目点を順次設定し、処理変更部40により選択された探索処理を用いて、各注目点の対応点を、注目点を設定した基準画像と同一時刻に取得された参照画像から探索する。
(もっと読む)
基材上のセキュリティ文書の印刷及び認証
【課題】セキュリティ印刷文書の生成及び認証を更に効果的にする方法を提供する。
【解決手段】セキュリティ文書を基材上に印刷する方法が開示される。最初に、基材の基準領域の第1の基準画像が生成される。画像は基準領域における基材の固有の特性を示す。その後、基材の固有の特性を示す符号化データが生成される。最後に、符号化データは基材の基準領域上に印刷され、それによりセキュリティ文書の印刷が行われる。認証は、印刷セキュリティ文書を走査し、基材の基準領域を検出し、前記基材の基準領域に符号化された符号化データを抽出復号化し、前記基材の基準領域の画像を処理し、前記復号化データから取得された基準領域の固有の特性と関連付けられたデータを前記処理された画像から取得される特性データと比較する。
(もっと読む)
画像処理装置およびプログラム
【課題】簡易な方法でブレードの画像を取得することができる画像処理装置を提供する。
【解決手段】CPU34cは、ジェットエンジン内に周期的に配置されたタービンブレードを撮像した複数の画像と、予め用意されたテンプレート画像とを比較する。CPU34cは、タービンブレードを撮像した複数の画像の中から、画像比較の結果に基づいて一部の画像を選択する。選択されたタービンブレードの画像はメモリカード50内の保存用フォルダに保存される。
(もっと読む)
距離画像処理装置および方法、距離画像再生装置および方法並びにプログラム
【課題】距離画像の画像ファイルのデータ量を効率よく低減できるようにする。
【解決手段】撮像部21A,21Bが、被写体を撮像することにより、被写体の3次元形状を表す奥行き情報および位置情報を含む距離値を算出するための基準画像および参照画像を取得する。距離画像生成部31が、基準画像および参照画像から距離値を算出する。距離画像変換部32が、所定範囲にある奥行き情報について、所定範囲外にある奥行き情報よりも大きい量子化数により量子化し、距離画像符号化部33が量子化された位置情報を含む距離値を各画素の画素値とする距離画像を符号化し、圧縮/伸長処理部24が符号化された距離画像の画像ファイルを生成する。
(もっと読む)
車載画像処理装置
【課題】自車両の運動量を算出するための画像処理を、算出する運動量の精度を保ちながら効率的に行える画像処理装置を提供する。
【解決手段】画像処理装置1は、車両の周囲を撮像する第1カメラ51と、画像の中心よりも周縁側の領域を特定領域A1,A2として抽出する特定領域抽出部12,13と、複数の特定領域内の画像情報に基づいて自車両の運動量を算出する運動量算出手段とを備えることで、撮像した画像のうち第1特定領域A1及び第2特定領域A2のみを処理対象とすることができるため、効率的に画像処理を行うことができる。
(もっと読む)
二次元フィルター最適化方法、及び車両用画像認識装置
【課題】認識対象物体に応じた最適な二次元フィルターを迅速に生成することが可能な二次元フィルター最適化方法を提供すること。
【解決手段】画像認識装置の二次元フィルターを最適化する二次元フィルター最適化方法であって、(1)ライン入力された二次元画像データの各画素値にそれぞれ異なる所定の係数を乗算する第1のステップと、(2)前記第1のステップにおいて所定の係数が乗算された各入力ラインに含まれる各画素値を合算して一次元画像データを生成する第2のステップと、(3)前記生成された一次元画像データの各要素値に対してそれぞれ異なる所定の係数を乗じてスカラー値を求める第3のステップと、を有し、前記スカラー値が目標値に近づくように所定の係数を変化させながら前記第1のステップから前記第3のステップまでを繰り返し実行することを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および学習装置
【課題】画像内で焦点距離の異なる被写体が複数含まれることによって生じているぼけを最適に除去することができるようにする。
【解決手段】特徴量算出部15は、特徴量算出画素抽出部14から供給された画素を用いて、注目画素の特徴量を算出する。係数生成部16は、演算用係数ベクトルW0乃至Wkを係数ROM17から取得し、特徴量と演算用係数ベクトルW0乃至Wkを用いた演算により、処理係数ベクトルWを生成する。積和演算部13は、予測画素抽出部12から供給される画素の画素値と処理係数ベクトルWとの演算により、入力画像のぼけを除去した出力画像を生成する。本発明は、例えば、画像のぼけ除去を行う画像処理装置に適用できる。
(もっと読む)
特徴に基づいた2次元/3次元画像のレジストレーション
画像レジストレーション装置は、2次元画像30から2次元の特徴のセット36を抽出し、3次元画像32から3次元の特徴のセット38を抽出する特徴検出器34、3次元のデータを2次元の投影データに投影する投影プロセッサ40、(i)2次元の特徴のセットと、投影のジオメトリ42を使用して投影プロセッサにより投影された3次元の投影された特徴のセットとを位置合わせするパラメータを調節し、(ii)調節されたパラメータを使用して、投影のジオメトリを使用して2次元画像と投影プロセッサにより投影される3次元画像とを位置合わせするレジストレーションプロセッサ46,52を有する。  (もっと読む)
(もっと読む)
人物追跡装置、人物追跡方法及び人物追跡プログラム
【課題】監視対象領域が非常に混雑している状況などでも、監視対象領域内の個々の人物を正確に検出することができるようにする。
【解決手段】複数のカメラ1により撮影された映像に写っている人物を検出する人物検出部8と、人物検出部8により検出された個々の人物をステレオ立体視して、個々の人物の3次元位置を推定する3次元位置推定部9とを設け、移動軌跡解析部10が3次元位置推定部9により推定された個々の人物の3次元位置の時間的変化を監視して、個々の人物の移動軌跡を解析する。
(もっと読む)
ソース画像を修正してターゲット画像を生成する、コンピュータによって実施される方法及びカメラ
【課題】画像から望ましくない特徴を除去する技術を提供する。
【解決手段】方法及びカメラ装置は、ソース画像を修正してターゲット画像を生成する。ソース画像は複数のピクセルから成る重ならないタイルに分割される。各タイルがラベリングされる。このラベルの確率分布が推測され、ここで当該確率分布は条件付確率場である。この条件付確率場から重みが求められる。次いで、ソース画像の各タイルがその重みに従って変換され、ターゲット画像の対応するタイルが生成される。変換は、ソース画像のすべてのあり得るラベリングにわたって周辺化しながら、ソース画像を与えられた、ターゲット画像の条件付尤度を最大化する。
(もっと読む)
交差点位置抽出方法、交差点位置抽出プログラムおよび交差点位置抽出装置
【課題】交差点情報を抽出するのに要する計算時間を短縮することの可能な交差点位置抽出方法を提供する。
【解決手段】回転角θごとにTb(θ;x,y)をI(x,y)の各画素に対してFFTを用いて畳み込むことによりH(θ;(x,y))を計算し(S201)、交差点モデルの各分枝の方向角θiに対応するH(θi;(x,y))を足し合わせることにより交差点モデルでのD(Mθ(x,y))を計算し(S202)、各画素において、D(Mθ(x,y))をθに関して微分し、微分値がゼロとなるθの値を求め、その中で最大のD(Mθ(x,y))をR(x,y)として抽出し(S203)、R(x,y)の極大値を検出し、画像データI(x,y)の極大値に対応する位置を交差点位置として抽出する(S104)。
(もっと読む)
トンネル覆工のひび割れ検査装置
【課題】トンネル覆工に発生するひび割れの進展の有無を高精度で検査するとともにその検査周期を短縮することでトンネル覆工のコンクリート剥落に対する安全性向上を図る。
【解決手段】トンネル覆工の内壁全周を平面的に連続して撮影した撮影画像からひび割れを抽出するとともに、連続撮影した撮影画像の間で位置合わせを行うとともに画像相関を行ってひび割れの相違点を抽出し、その抽出した相違点に基づいてトンネル覆工の内壁のひび割れの進展の有無を検査する。このことにより、トンネル覆工に発生するひび割れの進展の有無を高精度で検査するとともに、その検査周期を短縮することができる。トンネル覆工のコンクリート剥落に対する安全性を向上させることができる。営業時間帯に撮影ができることから、この点でも検査周期が短縮され、安全性が高まる。トンネル覆工のひび割れ抽出を行うための専用車両を用意する必要がなく既存の車輌を使うことができる。
(もっと読む)
画像処理装置、撮像装置、画像処理プログラム及び画像処理方法
【課題】重像画像は観賞に耐えられないという問題があった。
【解決手段】ある実施形態に係る画像処理装置は、重像画像に含まれる重像間の変形情報を取得する重像間変形取得部104と、取得された重像間の変形情報を基に、重像画像に対して少なくとも2回以上の変形処理を施して幾何的に変形させることによって、少なくとも2枚以上の変形画像を生成する画像変形部105と、重像画像に含まれる重像間の信号強度の関係を示す信号強度関係情報を取得する信号強度関係取得部106と、取得された信号強度関係情報を用いて、上記変形処理により生成された少なくとも2枚以上の変形画像の加算処理を行う信号処理部107と、を備える。
(もっと読む)
物体認識方法
【課題】距離センサから得られる距離データを用いて、対象物体の三次元的な位置姿勢を認識する。
【解決手段】距離を計測できるセンサによって計測したシーンデータと、目的物体の三次元形状を表すモデルデータとを、物体の局所的な表面形状を表す特徴量について照合することにより物体の三次元位置姿勢を検出する三次元物体認識方法において、モデルを、候補となる位置姿勢に配置したとき、モデルによって遮蔽され、本来計測不可能な範囲にシーンデータが存在するか否かを算出し、この幾何学的な矛盾の有無に基づいて、モデルの位置姿勢候補の成否を検証する。
(もっと読む)
物体認識装置およびロボット装置
【課題】距離データを用いて、対象物体の三次元的な位置姿勢を認識する。
【解決手段】物体の表面の三次元形状データを読み込み、物体の局所的な表面形状を表す特徴量を作成するモデル入力手段と、実際の環境を計測して距離データを取得し、物体の表面情報を作成するシーン計測手段と、シーン頂点の特徴量とモデル頂点の特徴量の類似度を算出し、それらシーン頂点とモデル頂点を対応点ペアとする対応点ペア作成手段と、対応点ペアを含むグループを作成し、対応点ペアとの関係で幾何学的一貫性を有する他の対応点ペアをグループに追加する処理を繰り返し、全ての対応点ペアを基準にグループを作成するグループ化手段と、グループに含まれる対応点ペアに基づき、モデルとシーンの対応点間の距離を最小にする座標変換式を算出し、座標変換式にしたがってモデルを移動させた結果をグループが示す物体の初期位置姿勢とする。
(もっと読む)
画像処理装置
【課題】ステレオ処理におけるサブピクセル演算に際して、演算量の低減を図る。
【解決手段】ステレオマッチング部2は、一方の画像におけるそれぞれの部分領域を相関元とし、個々の部分領域の相関先を他方の画像において探索し、相関元に対する相関先のずれ量を画素の整数倍で表されるピクセル値として算出する。物体領域特定部4は、画像平面上において物体が存在する物体領域を動的に特定する。サブピクセル処理部3は、物体領域特定部4によって特定された物体領域と位置的に対応した部分領域に限定して、ピクセル値よりも分解能が高いサブピクセル値を算出する。
(もっと読む)
撮像装置および方法並びにプログラム
【課題】デジタルカメラ等の顔検出機能を備えた撮像装置において、簡単な操作で、疑似三次元画像データを作成する。
【解決手段】記録された第一の画像データから疑似三次元画像を生成するために用いる参考画像データを生成し、顔検出手段により新たに顔が検出された際に、新たな顔を含むスルー画像データと、参考画像データとの相関値を算出し比較し、比較された相関値が所定の値より高い際に、取得された新たな顔を含む第二の画像データと、記録された第一の画像データから疑似三次元画像を生成する。
(もっと読む)
撮像装置、撮影支援方法、及び撮影支援プログラム
【課題】パノラマ撮影を簡単且つ高精度で行うことが可能な撮像装置を提供。
【解決手段】表示部23と、被写体を撮影して撮像信号を出力する固体撮像素子5と、パノラマ撮影モード時、撮影指示による撮影によって固体撮像素子5から出力された撮像信号からパノラマ画像データ生成用の第一の画像データを生成する機能、パノラマ撮影モード時、固体撮像素子5から出力された撮像信号から表示部23に表示させるスルー画像用の第二の画像データを生成する機能、及び撮影指示による撮影によって固体撮像素子5から出力された撮像信号から第二の画像データと同じ形式の第三の画像データを生成する機能を有するデジタル信号処理部17と、該撮影指示によって生成された第三の画像データの端部に設定される第一領域内のデータと、該撮影指示による撮影の後に生成された第二の画像データの端部に設定される第二領域内のデータとの相関度を検出する相関度検出部26とを備える。
(もっと読む)
281 - 300 / 750
[ Back to top ]