
Fターム[5B057DC34]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074) | 相関値を用いるもの (750)
Fターム[5B057DC34]に分類される特許
361 - 380 / 750
画像合成装置および画像合成プログラム

【課題】複数の元画像から非共通領域を抽出して容易に合成画像を作成することを課題とする。
【解決手段】本発明の画像合成装置1は、第1画像および第2画像が記憶された記憶部2と、前記第1画像と前記第2画像とを比較して、一方の画像における他方の画像と所定の画素特性が類似していない部分領域を非共通領域として抽出する領域分類部54と、その抽出した一方の画像の非共通領域を他方の画像に重畳して合成画像を作成する画像合成部55と、を備える。
(もっと読む)
透かし埋め込み装置

【課題】透かし埋め込みによる文書画像の画質低下を抑えることが可能な透かし埋め込み装置を提供する。
【解決手段】入力画像に所定の埋め込み情報を表す透かしパターンを埋め込む透かし埋め込み装置であって、入力画像上において、埋め込み情報を符号化した符号の各々に対応する透かしパターンが配置される透かし領域を決定する透かし領域決定部110と、透かし領域の入力画像に基づいて、符号の各々に対応付けられる透かしパターンを決定する透かしパターン決定部120と、符号と透かしパターンとの対応付けに基づいて透かしパターンを透かし領域に配置し、入力画像に埋め込む透かし埋め込み部130と、を備えることを特徴とする、透かし埋め込み装置100が提供される。
(もっと読む)
カメラ装置
【課題】撮像された画像から、実物の検出対象物体を高い精度で検出することができるカメラ装置20を提供する。
【解決手段】本発明のカメラ装置20は、撮像された画像内において、実物の検出対象物である可能性が高い大きさの物体が写っている領域について、パターンマッチングにより検出対象物体であるか否かの判定を行う。例えば、カメラ装置20は、撮像画像内の物体までの距離を測定することにより、撮像された物体の実際の大きさを算出し、予め検出対象物体として定義された大きさの範囲内の物体について、検出対象物体か否かの詳細なパターンマッチングを行う。
(もっと読む)
瞼検出装置及びプログラム
【課題】短時間で正しい瞼を検出できる瞼検出装置を提供する。
【解決手段】カメラ10は対象者の顔を撮影し、コンピュータ14のCPU24はその動画像を取得し、画像メモリ22に格納する。CPU24は、画像メモリ22に格納された動画像の所定の領域から対象者の上瞼と下瞼との組み合わせの候補となるエッジラインを抽出する。CPU24は、抽出したエッジラインの内、位置の移動が少なく、且つ、瞬きに相当する挙動を取るエッジラインを対象者の瞼と判別する。
(もっと読む)
検出データ処理装置、識別方法及びプログラム
【課題】同じマテリアルのコピーを受け取ったユーザがコルージョンアタックに成功することを困難とする。
【解決手段】この装置は、複数のコードワードからオリジナルマテリアルアイテムのウォータマークが付されたバージョン内に存在するコードワードを識別し、ウォータマークが付されたマテリアルアイテムのサンプルと、オリジナルマテリアルアイテムのコピーのサンプルとを比較し、ウォータマークが付されたマテリアルアイテムのサンプルと、オリジナルマテリアルアイテムのコピーのサンプルとが比較閾値以上に相異する場合、ウォータマークが付されたマテリアルアイテムの比較されたサンプルをオリジナルマテリアルアイテムからの対応するサンプルに置換する。オリジナルマテリアルアイテムには存在しなかったアーテファクト等の雑音が生じているマテリアルアイテムのオフェンディングコピーから高い確率でウォータマークコードワードを検出する。
(もっと読む)
画像認識システム及びその認識方法並びにプログラム
【課題】 入力画像の照明変動、オクルージョンの状態に関係なく、入力画像を正しく分類すること。
【解決手段】 入力画像部分領域抽出手段2は入力画像の部分領域を抽出する。パターン間距離算出手段3はこの部分領域と、予め辞書格納手段5に格納した登録画像の部分領域とのパターン間距離を各部分領域について算出する。領域距離値統合手段10は各部分領域について得られたパターン間距離を統合する。これを各カテゴリの登録画像について行う。識別手段4はその統合したパターン間距離のうちの最小値を求め、その最小値がしきい値よりも小さい場合にその最小距離を持つカテゴリを認識結果として出力する。
(もっと読む)
距離画像生成装置、距離画像生成方法及びプログラム
【課題】高精度かつ高速に距離画像を生成することのできる距離画像生成装置、距離画像生成方法及びプログラムを提供する。
【解決手段】基準画像と参照画像とを取得する撮像装置2a,2bと、基準画像及び参照画像について解像度の異なる複数の階層画像を生成する多重解像度画像生成部13と、少なくとも最低解像度の階層画像に対して対応点探索を行うSAD演算部6と、少なくとも最高解像度の階層画像に対して対応点探索を行うPOC演算部7を備え、低解像度の階層画像から対応点探索を開始し、順次解像度の高い階層画像について対応点探索を行い、最高解像度の階層画像に至るまで順に対応点探索を繰り返す対応点探索部15と、直前の階層についての探索結果に基づいて次の階層の階層画像の探索領域を設定する探索領域設定部14と、探索結果に基づいて距離画像を生成する距離画像生成部16とを備えている。
(もっと読む)
車両周辺監視装置及び方法
【課題】専用センサを用いることなく障害物検出と障害物の静止/移動検出を行う。
【解決手段】車両周辺監視装置は、車両に設置されたカメラの撮影画像を視点変換によって鳥瞰図画像に変換し、時刻t及び(t+1)の鳥瞰図画像の位置合わせを、それらの画像データに基づいて行う。この際、車両近傍に立体物が存在していないと仮定し、車両近傍の画像データに基づいて位置合わせを行う。これにより、高さのない平面標識は位置ずれなく重なるが、高さのある障害物には位置ずれが生じ、差分領域が形成される。この差分領域を障害物の描画領域として捉えて障害物を検出する。更に、位置合わせ後の鳥瞰図画像間における、障害物が地面に設置している点(470等)の移動量から、障害物の静止/移動を分類検出し、分類結果に応じて警告内容を異ならせる。
(もっと読む)
移動物品の欠陥部等の検出方法、画像処理プログラム並びにデータ処理装置
【課題】 低廉な装置構成により移動物品の欠陥部等を精度よく確実に検出し、しかも検出処理を短時間で行うことのできる移動物品の画像処理用データの前処理方法、画像処理プログラム並びにデータ処理装置を提供する。
【解決手段】
検出手段により連続して入力される移動中の物品からの物理データを所要の読み取り間隔で読み取って単位時間当たりの複数の読み取りデータを記憶手段により順次記憶させる。記憶された物品からの物理データを画素データとして順次分割されたフレームに読み出し、物品の移動速度と読み取り時間間隔とに相関する物品の移動量に対応した抽出幅で各フレームのデータから抽出して各フレームデータからそれぞれ抽出画素データを生成し、抽出された画素データを基礎にこれらを処理して欠陥部等の検出を行う。検出時間短縮と高精度の検出を実現する。
(もっと読む)
カメラ間連結関係情報生成装置
【課題】信頼性の高いカメラ間の連結関係の推定が行えるカメラ間連結関係情報生成装置を提供する。
【解決手段】複数のカメラで撮影された映像から被写体の特徴量を抽出する特徴量抽出部21と、撮影された映像の各々において被写体が出現/消失した点であるIn/Out点を抽出するIn/Out点抽出部22と、抽出されたIn/Out点に基づいてIn/Out領域を形成するIn/Out領域形成部23と、In/Out領域に含まれるIn/Out点の複数の組合せ各々について、被写体の特徴量毎の類似度の総和を求めることにより相関値を算出する相関値算出部24と、相関値に基づき頻度ヒストグラムを作成する頻度ヒストグラム作成部25と、頻度ヒストグラムのピークを抽出することから複数のカメラ間の連結関係の有無を推定して連結関係情報を生成する連結関係情報生成部26と、を備える。
(もっと読む)
ステレオ画像処理装置
【課題】故障診断用のデータを記憶するメモリ容量を低減し、コスト低減を図りつつ診断効率を向上する。
【解決手段】システム監視部30がテストデータ記憶部40のトレーニングデータをデータセレクタ5a,5bを介してマッチング回路部10の画像補正部11a,11bに入力し、診断を行う。トレーニングデータは、1フレーム中の縦4ライン分だけのデータを左右画像に対して用意し、縦4ライン分のトレーニングデータを縦方向に繰り返し使用して1フレーム分の診断を行う。マッチング回路部10で処理されたデータとテストデータ記憶部40のデータとを比較し、両者が一致すれば正常動作と判定し、両者が一致しない場合、異常発生と判断する。これにより、1フレーム全体の教師データが不要になり、メモリ容量を小規模化し、コストを低減することが可能となる。
(もっと読む)
特徴レベル・セグメンテーションを実行するシステムおよび方法
【課題】前景画素を正確に解釈するための信頼できかつロバストな特徴レベル・セグメンテーションを提供する。
【解決手段】本発明は、a.背景画像を選択し、b.入力画像を選択し、c.前記入力画像の各入力画素について、c.i.前記画素を前景候補画素または背景候補画素として分類し、c.ii.前記画素の近傍画像を選択し、c.iii.前記近傍画像の集合体変化を決定し、c.iv.前記集合体変化に応じて、前記画素を前景画素または背景画素として再分類し、d.前景画素として再分類された画像の画素全部の標識を出力する。
(もっと読む)
移動物体認識装置
【課題】移動物体認識に係る画像処理の結果の確実性を良好に示すことが可能であり、必要に応じ適切な報知を可能とする移動物体認識装置を提供する。
【解決手段】撮影装置により時系列に撮影された画像データを取得するデータ取得部1と、異なる時刻に撮影された2つの画像データに対し、同一の認識対象パターンの相関関係を演算する処理を含む複数の画像処理を実行して移動物体の認識を行う認識部2と、認識部2における各画像処理の結果のうちの少なくとも1つの結果に基づいて、移動物体の認識の確実性を示す認識信頼度を演算する信頼度演算部7と、を備える。
(もっと読む)
車載用ナビゲーション装置、路面標示識別プログラム及び路面標示識別方法
【課題】道路の走行環境が変わる中で、カメラで撮像された道路の路面の標示を的確に検出し、車両の進行方向の認識精度を向上する。
【解決手段】車載用ナビゲーション装置100は、車両に搭載されたカメラ6より撮像された車両の後方の映像の中で道路標示の認識に不要なライト照射部分の画像を検出し、検出された画像領域を避けた所定形状の画像領域を切り出し順次記憶部7bに記憶する。そして、新たに得られた切出画像と既に記憶部7bに記憶されている切出画像とを合成し、その合成画像から道路標示の画像を検出及び認識する。
(もっと読む)
SAR画像の3D形状算出装置及びSAR画像の歪補正装置
【課題】SAR画像について精度の高い形状推定を行うことも目的とする。また、SAR画像のレイオーバーについて補正を行うことを目的とする。
【解決手段】同一方向からスクイント角を変えて撮像を行うことで得た、同一個所を撮像した2枚以上のSAR画像を入力画像として用い、SAR画像の3D形状の推定を行う。また、推定した3D形状と、入力画像とに基づき、フォアショートニングと光学の倒れこみの補正を行うとともに、複数の入力画像における対応点の相関から、歪補正後の画素の輝度を算出し、レイオーバーを補正する。
(もっと読む)
画像認識装置、画像認識方法、車両制御装置および車両制御方法
【課題】歩行者認識において認識精度を維持しつつ演算量を削減し、高速化すること。
【解決手段】テンプレート用の画像を予め周波数展開してテンプレートとして用い、カメラが撮影した画像から判定対象領域A10を切り出すと、切り出した画像を周波数展開して周波数画像A11を作成する。得られた周波数画像A11のうち、歩行者の輪郭に対応する周波数領域を選択して、もしくは重み付けなどによって優先してテンプレートと比較し、一致するならば歩行者であると判定する。
(もっと読む)
組み付け検査方法
【課題】簡単な構造で、製造ライン上で部品の組み付けの良否を精度良く検査することができる方法を提供する。
【解決手段】製造ライン上で部品の組み付けを検査する方法であって、予め、組み付ける部品の基準となるマスタ画像を複数撮影しておき、部品を実際に組み付ける際の実画像を複数撮影し、各マスタ画像と各実画像との相関値をそれぞれ求め、各相関値に基づいて部品の組み付けの良否を判定する。実画像と相関値が最大のマスタ画像を抽出して組み付けられた部品の品番を特定して、特定された部品と組み付けられるべき部品との品番とを照合し、組み付けられるべき部品のマスタ画像と各実画像との相関値を求めて、組み付けた部品が組み付けられるべき部品と一致しているかを判定し、組み付けられるべきでない部品の複数のマスタ画像と各実画像との相関値を求めて、組み付けた部品が組み付けられるべきでない部品と一致していないかを判定する。
(もっと読む)
パノラマ画像技術
2つの写真画像の、大きな、パノラマ画像をデバイス内で作り出すことに適合された無線デバイス又はカメラ付き電話デバイス、与えられる該2つの画像は共通重なり領域を有する。2つの画像が異なる回転又は視点である場合でさえも、パノラマ画像は、作り出されることが可能である。デバイスは、パノラマ画像を作り出す前に、何らかの回転の相違を補正する。 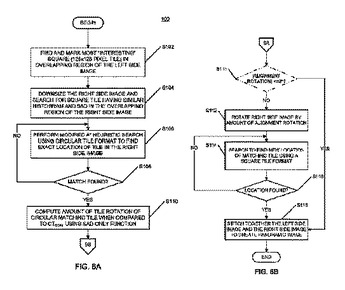 (もっと読む)
(もっと読む)
情報処理装置および情報処理方法、認識装置および情報認識方法、並びに、プログラム
【課題】ブースティング処理のための次数を増やす
【解決手段】画像の特徴を求めるために、8種類の方向と5通りの周波数を採用して、合計40個のガボアフィルタを用いて、それぞれの特徴点の特徴量が計算される。特に顔画像の特徴を求める場合には、特徴点の位置によって特徴を記述するのに必要な周波数及び方向パラメータは異なり、それぞれの特徴点では不要なパラメータが存在する可能性がある。特徴点により必要な周波数帯域および方向は、連続した範囲内にあると仮定することができる。そこで、40個のガボアフィルタにより得られた特徴量のうちの一部を、スケール、方向毎に並べた特徴次元から、例えば、矩形131、矩形132、矩形133などように、任意の位置、大きさの矩形領域を選択することにより、何組かの局所特徴量の組み合わせを決めるものとすると好適である。本発明は、画像処理装置に適用できる。
(もっと読む)
画像処理装置、コンピュータプログラム、及び画像処理方法
【課題】オープンMR画像のように術中に得られる画像の画質が低くても、患部の視認性を向上させるための新たな技術を提供する。
【解決手段】画像処理装置1は、患部画像を含む高画質画像と患部画像を含む低画質画像とを剛体位置合わせ法によって位置合わせする手段と、高画質画像における患部L2と低画質画像における患部L1とを変形変換する手段と、を備えて、高画質画像と低画質画像との変形位置合わせを行う。
(もっと読む)
361 - 380 / 750
[ Back to top ]