
Fターム[5B057DC36]の内容
Fターム[5B057DC36]に分類される特許
3,141 - 3,160 / 3,240
映像オブジェクト抽出装置、映像オブジェクト軌跡合成装置、その方法及びそのプログラム

【課題】 背景画像にノイズが存在する場合にボールを安定に抽出・追跡することが可能な映像オブジェクト抽出装置を提供する。
【解決手段】 時系列に入力される連続した第1乃至第3の画像のうち、第1の画像の記憶手段112と、第2の画像の記憶手段111と、第3の画像と第2の画像との輝度の差分を画素値とした第1の差分画像を生成する手段113と、第2の画像と第1の画像との輝度の差分を画素値とした第2の差分画像を生成する手段114と、第1の差分画像の画素値の符号と第2の差分画像の画素値の符号とが異なる領域を判別してオブジェクト候補画像を生成する候補画像生成手段115とを備えるオブジェクト候補画像生成手段11と、オブジェクト候補画像の中から、所定の抽出条件に基づいて、抽出すべき映像オブジェクトの位置を抽出するオブジェクト抽出手段12とを有する。
(もっと読む)
画像処理装置、画像処理方法、および、画像処理プログラム

【課題】複数の画像から高解像度画像を生成する画像処理における処理時間の短縮。
【解決手段】CPU200は、基準画像f_refにおいて所定の特徴を有する特徴領域TAを決定する。CPU200は、対象画像f(a)(a=1,2,3)において、特徴領域TAに対応する対応特徴領域CAを設定する。そして、CPU200は、特徴領域TAと対応特徴領域CAの画像データ(例えば、特徴的部位を構成する特徴画素および特徴画素と対応する対応特徴画素)に基づいて、対象画像f(a)の基準画像f_refに対する被写体の位置ずれを補正する補正量を、対象画像f(a)(a=1,2,3)のそれぞれについて算出する。CPU200は、算出された補正量に基づいて、位置ずれを補正すると共に、補正された複数の画像データ(基準画像f_refおよび対象画像f(a)(a=1,2,3)を表す画像データ)を合成して、高解像度画像データを生成する。
(もっと読む)
立体物イメージスキャナ
【課題】 立体物のイメージスキャナにおいて大きい立体物の全体像を良好な画質で取得する。
【解決手段】 スキャニングユニット24は、リニアイメージセンサとテレセントリック結像系を内蔵し、前方の鉛直な線状のターゲット平面領域48にピントが合っている。鉛直で線状の2本の光源34A、34Bがスキャニングユニット24の左右両側に配置され、ターゲット平面領域48を照明光する。光源34A、34Bの全箇所からの照明光の鉛直面に沿った出射角度が規制され、それにより、ターゲット平面領域48の全箇所にて、照明光の鉛直面に沿った入射角と光量が一定にされる。スキャニングユニット24と光源34A、34Bが一緒にX、Y、Z方向に移動して、被写体の空間15を多数のレイヤとバンドに分割してスキャンする。スキャンで得た画像データからピントの合った画素が抽出され合焦点画像が合成される。
(もっと読む)
作物収穫装置
【課題】
作物の像を撮影する第1撮影手段と、作物を摘み取って保持するところの収穫手段が保持している作物の像を第1撮影手段とは異なる方向から撮影する第2撮影手段とを設け、これらの各撮影手段の撮影結果に基づいて作物を選別することにより、作物の収穫時に該作物を選別するに際して、その選別、判定の精度向上を図ることができる作物収穫装置の提供を目的とする。
【解決手段】
作物の像を撮影する第1撮影手段50と、作物を摘み取り、かつ保持して移送する収穫手段Aと、上記収穫手段Aが保持している作物の像を上記第1撮影手段50とは異なる方向から撮影する第2撮影手段53とを備え、上記第1および第2の各撮影手段50,53の撮影結果に基づいて作物を選別することを特徴とする。
(もっと読む)
顔認証装置、顔認証方法および通行制御装置
【課題】外光などによる設置環境や設置条件の影響を受けずに、写真等の平面画像を利用しての他人の成り済ましをより高精度に防止することが可能となる顔認証装置を提供する。
【解決手段】被認証者の顔画像をカメラで撮影し、得られた顔画像を辞書情報と照合することにより当該被認証者が本人であるか否かを判定する顔認証装置において、カメラのレンズ中心点(視野角中心点)を被認証者の顔の特徴点と相対向させた後、カメラから被認証者の顔の特徴点までの距離を測定し、この測定した距離が適性値である場合、カメラから被認証者の顔の特徴点までの距離を測定する距離測定用センサの向きを移動させることにより、被認証者の顔の特徴点周辺の凹凸を検出し、凹凸が検出できた場合に顔照合処理を実行する。
(もっと読む)
画像処理装置およびその方法
【課題】 画像全体の明るさや色の変換では補正しきれない画像に対して、所定色領域内の色相および彩度の補正を簡単かつ効果的に行うことが望まれる。
【解決手段】 入力画像をRAM 202にロードし(S1)、入力画像のコントラストおよびカラーバランスを補正し(S2、S3)、補正後の画像から所定色領域を抽出し(S4)、所定色領域があるか否かを判定し(S5)、所定色領域がある場合は、所定色領域の色補正処理を行う(S6)。
(もっと読む)
表示装置
【課題】 周囲環境に対応した適切なモニターの輝度調節を行う表示装置を得る。
【解決手段】 画素毎に明るさを検出可能な高ダイナミックレンジカメラ11で車両前方を撮影し、撮像素子13の撮影画像信号を用い、画面分割処理部20で画面中心の所定範囲内をN×N個に分割し、分割画面映像素子ピーク検出部22で分割画面における所定以上の明るい映像素子部分を明部分映像素子検出部23で検出し、所定以上暗い部分を暗部分映像素子検出部24で検出する。ピーク値映像素子数変化検出部25ではそれらの映像素子数の変化を検出し、ピーク値映像素子数初期所定値到達判別部28でその映像素子数が初期の所定以上になったことを検出したときには、分割画面映像素子明るさ変化対応輝度制御部18でその映像素子数に対応してモニター15の輝度を制御する。その他の場合は画面平均明るさ対応輝度制御部17で画面の平均明るさに対応した輝度の制御を行う。
(もっと読む)
画像処理装置
記憶色に対する副作用の少ない自動色調整を行う。入力画像信号に含まれる各画素ごとに画素信号の特定範囲の色を補正する画像処理装置において、画素信号の内、輝度成分を除いたふたつの色度信号に基づいて特定範囲の色の領域に対して、周辺は小さく、概略中央付近が大きな補正強度を生成する強度決定手段200Aと、画素信号を補正する目標色を設定する目標色設定手段400Aと、画素信号に含まれる画素情報以外の情報をも用いて補正度合を設定する補正度合設定手段600と、強度決定手段200Aの出力する補正強度と補正度合設定手段600の出力する補正度合に応じて、画像信号を目標色に近づける補正手段を備える。  (もっと読む)
(もっと読む)
画像処理装置、画像出力装置、画像処理方法、プログラム及び記録媒体
【課題】観察の目的に応じて任意に指定した領域の階調表現を最適化できる技術の出現が望まれる。
【解決手段】画像処理装置として、(a1)入力画像のうち任意に指定された特定領域について、階調値の分布状況を評価する階調分布評価部と、(b1)階調分布評価部の評価結果に基づいて、特定領域内の入力画像に階調歪みが生じないように、特定領域の入力画像のみを階調変換する階調変換部とを有するものを提案する。階調変換の手法には、例えば階調幅を増幅する方法とガンマ変換を用いて平均輝度値をシフトする方法がある。
(もっと読む)
画像処理
【課題】画像を表すのに使用されるデータをデジタル処理する方法。
【解決手段】画像の色調節されていない成分に関する未調節データを使用して該画像の少なくとも1つの色調節された成分におけるエッジに関するエッジデータをスケーリングする。
(もっと読む)
瞳孔検出装置および虹彩認証装置
【課題】まつげ等を瞳孔と間違って検出する等の誤検出をなくし瞳孔検出精度を向上させ、精度よくかつ高速に瞳孔位置の検出が可能な瞳孔検出装置を提供する。
【解決手段】目画像の中から瞳孔の候補となりうる瞳孔候補の位置を検出する瞳孔候補検出部210と、検出した複数の瞳孔候補の位置を保持する瞳孔候補保持部280と、複数の瞳孔候補のうち、瞳孔候補の中心位置から所定の距離以内の領域に他の瞳孔候補の中心位置が存在する瞳孔候補を選択する瞳孔選択部290とを備えた。
(もっと読む)
画像処理装置、画像出力装置、画像処理方法、プログラム及び記録媒体
【課題】階調表現域の上下に余裕をもっている画像の場合、濃淡変化の微妙な部分の再現性が弱くなるため、内容の確認が難しかった。
【解決手段】画像処理装置として、(a)入力画像について、高輝度代表値と低輝度代表値を求める代表値検出部と、(b)高輝度代表値から低輝度代表値を減算し、入力画像が有する階調幅を算出する階調幅算出部と、(c)許容階調幅の最大値を入力画像の階調幅で除算演算し、入力画像の階調幅を許容階調幅まで増幅するのに必要な増幅率を求める増幅率演算部と、(d)入力画像を構成する各画素の輝度値を、増幅率に基づき増幅する階調増幅部とを有するものを提案する。
(もっと読む)
顕微鏡画像の導入された「ブラインド・デコンボリューション」方法及びソフトウエア
【課題】 顕微鏡観察対象物の周囲を適切に考慮し、短時間で結果を提供可能な、顕微鏡画像のブラインド・デコンボリューション方法及びソフトウェアを提供すること。
【解決手段】 顕微鏡画像のブラインド・デコンボリューション方法において、a)少なくとも1つの顕微鏡対象物(40)の対象物データを撮像ないし生成するステップ、b)ただ1つのパラメータに依存する評価された(1つの)PSFの影響の下で、見込まれた(1つの)画像を求めるステップ、c)前記撮像ないし生成された画像データと、前記評価されたPSFにより計算された画像データとを比較するステップ、d)比較の結果が悪い場合、同様に1つの実験的パラメータにおいてのみ変化される(1つの)新たなPSFを求めるステップ、e)前記計算された対象物データと前記撮像ないし生成された対象物データとの間で十分な一致が達成されるまで前記ステップb〜dを繰返し実行するステップを有することを特徴とする。 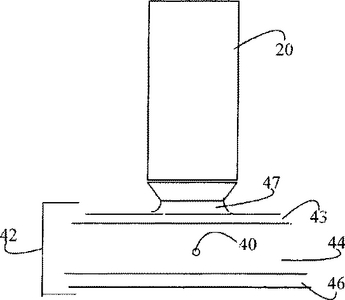 (もっと読む)
(もっと読む)
画像処理装置およびその方法
【課題】 画像全体の明るさや色の変換では補正しきれない画像に対して、所定色領域内の色相および彩度の補正を簡単かつ効果的に行うことが望まれる。
【解決手段】 入力画像をRAM 202にロードし(S1)、入力画像のコントラストおよびカラーバランスを補正し(S2、S3)、補正後の画像から所定色領域を抽出し(S4)、所定色領域があるか否かを判定し(S5)、所定色領域がある場合は、所定色領域の色補正処理を行う(S6)。
(もっと読む)
ノイズ検出装置、ノイズ検出プログラム、ノイズ検出方法、特異領域検出装置、特異領域検出プログラム、特異領域検出方法、キャリブレーション装置、キャリブレーションプログラムおよびキャリブレーション方法
【課題】 検出対象のノイズ、特にバンディングノイズを確実に検出することができなかった。また、ノイズ検出対象の画像を取得する際の条件によってノイズの検出精度が著しく異なっていた。
【解決手段】 記録媒体に印刷されたパッチに含まれるノイズを検出するにあたり、上記パッチにおける記録材の分布を示す分布情報を取得し、同取得した分布情報に基づいて、上記パッチより小さな複数の分割領域における分布情報を取得し、各分割領域における分布情報に基づいて、他の領域と比較して特異な分布となっている特異領域を抽出し、特異領域を除く分割領域における分布情報に基づいて、上記パッチのノイズを検出する。
(もっと読む)
瞳孔検出装置および虹彩認証装置
【課題】高速にかつ精度よく瞳孔位置の検出が可能な瞳孔検出装置を提供する。
【解決手段】同心円状の複数の円をそれぞれ積分円として目画像上に設定し積分円の円周上に位置する目画像の画像データを抽出する画像データ抽出部220と、積分円の中心座標を示すポインタ部260と、画像データ抽出部220が抽出した画像データを積分円のそれぞれの円周に沿って積分する周回積分部230と、積分円の積分値が積分円の半径に対してステップ状に変化したことを検出する瞳孔半径検出部250と、積分円の積分値が積分円の半径に対してステップ状に変化した場合にその積分円の中心座標を瞳孔位置座標として検出する瞳孔位置検出部280とを備え、画像データ抽出部220は複数個の画像データを同時に抽出する。
(もっと読む)
画像処理装置、画像形成装置、画像処理方法及びコンピュータプログラム
【課題】 画像データの各画素データの濃度に対応して適切な階調再現処理を施せる画像処理装置、画像処理方法、画像形成装置、及びコンピュータプログラムを提供する。
【解決手段】 階調再現処理部16は、入力された画像データの各画素値が、低濃度領域、中濃度領域又は高濃度領域のいずれに含まれるか否かを濃度領域判定部161によって判定する。濃度領域判定部161は、中濃度領域に含まれると判定された画素データを誤差拡散処理部162へ転送し、低濃度領域又は高濃度領域に含まれると判定された画素データをFMスクリーン処理部164へ転送する。誤差拡散処理部162は、周辺参照部163による周辺画素の量子化誤差を参照した誤差拡散処理を取得した画素データに実行し、FMスクリーン処理部164は、閾値スクリーンテーブル165を利用したFMスクリーン処理を取得した画素データに実行する。
(もっと読む)
適応性3Dノイズ減少装置及び方法
一般的なノイズ減少のための非リカーシブ3D処理方法及びシステムが開示される。3Dノイズ減少器は、5つの形式のノイズを、変化する統計値の等価加法性ノイズに簡単に変換することをベースとする。ここに提案する技術は、出力ノイズ分散の最小化(MNV)及び埋め込まれたモーション推定(EME)を結合する効率的な時間的フィルタリング技術も含む。ここに提案する時間的フィルタリング技術は、より効率的なノイズ減少器のために古典的なモーション推定及びモーション補償と更に結合されてもよい。又、ここに提案する技術は、健全で且つ効率的な形状適応性ウインドウ動作(SAW)を伴う最小平均二乗エラー(MMSE)を結合する空間的ノイズ減少器も備え、これは、全イメージ、特に、縁部分に対してランダムノイズを平滑化するのに使用される。ゆっくり変化する領域において最終的な過剰フィルタリングに対してバンディング作用を取り扱うためのMMSEに対する別の変更も導入される。 (もっと読む)
3次元形状測定装置および方法
【課題】 複数レベルの投影パターンを投影して3次元形状を測定する際に、パターン検出を確実に行なえるようにする。
【解決手段】 パターン投影装置10aが、1つ置きに全白のストライプを配置したストライプパターンを被写体に投影する。パターン投影装置10と同光軸の第1カメラ20の撮影画像によりストライプパターンを再コード化し、再コード化したストライプパターンと、パターン投影装置10と異なる方向から撮像する第2カメラ30の撮影画像とを対応づけて被写体までの距離を算出する。ストライプパターンは256階調の中の0−127レベルを5段階に分けた6種類の輝度ストライプと全白すなわち255レベルの組み合わせである。そして、必ず0−127レベルのストライプの間に255レベルのストライプを配置している。そのため、隣り合うストライプ同士が128レベル差以上になる。
(もっと読む)
映像認識システム、映像認識方法、映像補正システムおよび映像補正方法
【課題】 リファレンス映像が少ない場合であっても、認識率を向上できる映像認識システムを提供する。
【解決手段】 第1映像を入力する映像入力装置90と、複数のリファレンス映像を保存するデータベース92と、第1映像およびリファレンス映像を複数のサブ領域に分割し、第1映像の各サブ領域とリファレンス映像の対応するサブ領域とをそれぞれ比較し、この比較結果に基づいて、第1映像と最大の相関を有するリファレンス映像を決定する比較部(91)とを含む映像認識システム。
(もっと読む)
3,141 - 3,160 / 3,240
[ Back to top ]