
Fターム[5B057DC36]の内容
Fターム[5B057DC36]に分類される特許
3,201 - 3,220 / 3,240
画像生成装置用の画像補正用パラメータの生成

【課題】 個々の画像生成装置に適した画像補正パラメータセットを容易に生成する。
【解決手段】 所定のテストチャートを表す画像データとして、基準色空間で表現された基準画像データと画像生成装置によってテストチャートを撮像することにより生成された対象画像データとを格納する。複数の画像補正パラメータの中から未選択の画像補正パラメータ1つを注目補正パラメータとして選択し、基準画像データと色空間処理後の対象画像データとを比較して、色空間処理後の対象画像データを基準画像データに適合させるように注目補正パラメータの値を決定し、決定された値を用いた画像補正を施すことによって色空間処理後の対象画像データを更新する処理を、複数の画像補正パラメータの中の各画像補正パラメータについて順次実行する。決定された複数の画像補正パラメータ値を特定の画像生成装置に適した画像補正パラメータセットとして設定する。
(もっと読む)
移動物体検出装置及び移動物体検出方法
カメラ(100)からの出力に基づいて、移動物体を示すデータを時間軸に沿って並べた時系列データを生成する時空間データ生成部(120)と、生成された時系列データに基づいて、2本以上の脚を持つ移動物体の移動により発生する脚間の時間変化に関する情報である脚間情報を抽出する脚間情報抽出部(140)と、抽出された脚間情報に含まれる周期性を解析する周期性解析部(150)と、解析された周期性から、移動物体の存否を含む移動情報を生成する移動物体検出部(160)とを備える。 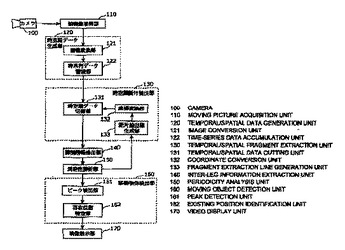 (もっと読む)
(もっと読む)
電子システムで提示するためにカメラ画像から顔を抽出するシステム及び方法
電子システムにおいて人物を提示するシステム及び方法。対象人物の画像を含む画像を取得する。画像またはデジタル提示を、画像中の対象人物と関連する顔面特徴を認識するよう処理する。対象人物の顔面特徴は、次に、画像から抽出される。抽出された対象人物の顔面特徴は、対象人物が電子システムに接続されるときに提示する同一又は別個且つ異なる電子システムに関連する表示インタフェースを介して表示される。取得された画像を取り込む画像取り込み装置は、対象人物が笑顔である時又は対象人物が取り込み装置を見つめている時に画像を取るよう適合される。抽出された対象人物の顔面部分を有するアイコンを、電子システムに関連する表示インタフェースを介して対象ユーザを提示するために生成してもよい。  (もっと読む)
(もっと読む)
画像の診断的評価を支援する装置及び方法
本発明は、例えば腫瘍である潜在的病理組織を評価する装置及び方法に係る。これに関しては、寸法又はエッジコントラスト等の特性パラメータは、組織の三次元画像からデータ処理装置において確定される。更には、記録された例に関連する特性パラメータ及び診断的追加情報を有するデータレコードは、データベースモジュールにおいて格納される。データベースモジュールにおいては、続いて、特性パラメータに関連して考慮される組織に類似するデータレコードを確立することが可能である。これらのデータレコードは、モニタ上に表示され得、現在の画像の評価をする医師へ支援を与える。 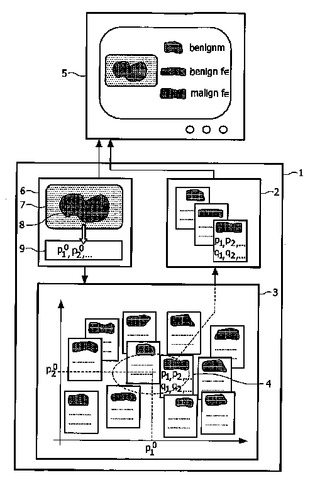 (もっと読む)
(もっと読む)
表示装置の特性設定、校正及び検証のためのシステムと方法
本発明は第二表示装置(図3、ブロック82)に伝達され、かつ、それによる使用が可能になる第一表示装置(図3、ブロック76)からの特性設定情報を作成するシステム及び方法(図3)を目指している。コンピューターが読み取れる媒体内に含まれているコンピューターが読み取れる命令が第一表示装置(図3、ブロック70)を校正し、前記校正情報からICCカラー・プロフィールを作成し(図3、ブロック72)、ICCカラー・プロフィールを記憶し、そのICCカラー・プロフィールを第二表示装置に送り、使用させる。校正又は特性設定情報は画像ファイルとも関連付けられて、表示のための第二の位置に送る(図3)。 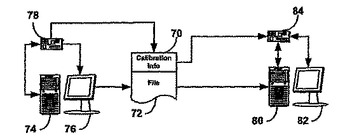 (もっと読む)
(もっと読む)
画像歪み補正プログラム,画像歪み補正装置,画像歪み補正方法並びに画像歪み補正プログラムを格納した記録媒体
画像撮像装置により紙面を撮像した画像から、紙面内容を手がかりとして、紙面曲面上で互いに平行であった測地線の射影集合を抽出すると共に、測地線の射影集合から紙面曲面に該当する線織面を形成する線織線の射影集合を抽出する。そして、測地線及び線織線の射影集合から紙面曲面を推定し、その紙面曲面に基づいて画像の歪みを補正する。このようにすれば、多様な歪みの種類に対応可能となると共に、画像に紙面の一部しか表れていないときであっても歪み補正を行うことができる。 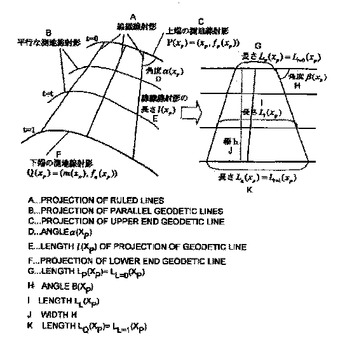 (もっと読む)
(もっと読む)
3D自動測量装置
360度全周囲カメラで得られる動画映像を解析して、画像内の任意の対象物について高精度な三次元計測を行う。所望の計測点と座標が既知の基準点を含む動画像を撮影する周囲画像撮影部101と、撮影画像を記録する画像記録部102と、画像内の映像的な特徴点を抽出する特徴点抽出部103と、画像内の計測点を自動抽出する計測点特定部104と、画像内の基準点を自動抽出する基準点特定部105と、計測点,基準点,特徴点を各フレーム画像内で対
応付ける対応点追跡部106と、対応付けられた計測点,基準点,特徴点の三次元相対座標を演算するベクトル演算部107と、上記演算を繰り返して三次元相対座標を統計処理する誤差最小化処理部108と、基準点の既知座標により三次元相対座標を絶対座標系に変換する絶対座標取得部109と、最終座標を記録する計測データ記録部110と、記録された計測データを表示する表示部111とを備える。
(もっと読む)
測定システム及び方法
本発明は、方法および測定システムを提供する。当該方法は:測定画像情報を含む測定モデルを提供するステップと;上記測定画像情報を利用することにより測定領域を突き止めるステップと;測定結果情報を提供する為に少なくとも一つの測定を実施するステップと;を含む。 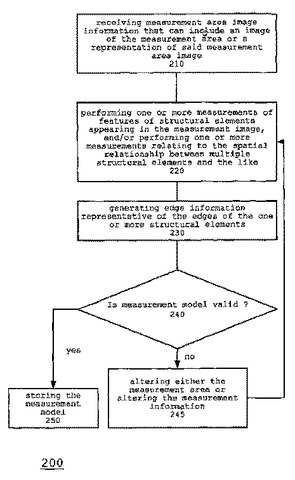 (もっと読む)
(もっと読む)
長方形状動き検索
長方形状動き検索のための方法が開示される。当該方法のある実施形態は、長方形の検索領域をなす複数の動き検索点に対して動き測定を実行し、前記動き測定の結果に基づいて動き検索点のうちで最小動き検索点を見出し、該最小動き検索点が当該長方形検索領域の内部領域にあれば当該ピクセルブロックの第一のビデオフレームから第二のビデオフレームへの相対的な移動に対応する動きベクトルを見出すことを含む。
 (もっと読む)
(もっと読む)
デジタル画像におけるテキスト状エッジの強調

デジタル画像においてテキスト状エッジを強調するシステム及び方法が説明される。一態様では、画像ピクセルのブロック(27)のピクセルが第1のピクセルクラス(29)及び第2のピクセルクラス(31)にセグメント化される。第1のクラス(29)及び第2のクラス(31)の強度分布をそれぞれ表す強度値を分離する距離の測度に基づいて、且つ第1のピクセルクラス(29)及び第2のピクセルクラス(31)の両方に対して計算された強度ヒストグラムの尖りの測度に基づいて、ピクセルブロック(27)が少なくとも1つのテキスト状エッジを含む可能性が高いという判断に応じて、このピクセルブロック(27)がエッジ強調される。 (もっと読む)
電子画像蓄積方法、電子画像蓄積装置、及び電子画像蓄積システム
電子画像蓄積方法は、顔画像登録フェーズ及び画像整理フェーズを有する。前記顔画像登録フェーズは、登録画像が入力されるステップと、前記登録画像中の顔画像の顔の特徴量を求めるステップと、前記特徴量を登録顔画像として記憶するステップとを含む。前記画像整理フェーズは、整理対象画像が入力されるステップと、前記整理対象画像中の顔画像の顔の特徴量を求めるステップと、前記求めた整理対象画像中の顔の特徴量に該当する特徴量の顔を前記登録顔画像から検出するステップと、前記整理対象画像と前記検出した登録顔画像とを関連付けるステップとを含む。 (もっと読む)
透かしシステムにおいてタンパリングを検出する方法及び装置
本発明は、埋め込み透かしを不規則に変更して、平均化攻撃によってシステムがハッキングされないようにする透かしシステムに関する。平均化攻撃では、透かしを入れた信号のセグメントが蓄積される。これによって、ホスト信号が打ち消されることになる一方、埋め込み透かしはコヒーレントに蓄積する。そのようにして判定される透かしAは、透かしを入れた信号からハッカーによって更に減算される。本発明は、埋め込み透かしが(AからBに、又は、Aから、ない状態に)変わる時点をハッカーが分からないという洞察を利用している。よって、ハッキングされた信号の断片は、作為なしにハッカーによって埋め込まれる、−Aという負の透かしを備えることになる。これによって、透かし検出器が、反対極性の相関ピークを生成することになる。本発明は、そうした負のピークの検出と、信号がタンパリングされたということをそれから結論付けることとにある。透かしのペイロードは保持されている。これによって、ハッカーのトレースバックができるようになる。  (もっと読む)
(もっと読む)
複数のイメージセンサ間における視野関係を決定するためのコンピュータ化された方法及び装置
第1の光景を表す複数の第1のビデオフレームについての第1のイメージデータを受容する(図5の502)ことを含むコンピュータ化されたイメージ解析方法。第1のビデオフレームの各々(図1の102(1))が複数のイメージ領域から構成され、少なくとも1つの第1のビデオフレームの1つのイメージ領域内に第1のオブジェクトが存在する。第2の光景を表す複数の第2のビデオフレームについての第2のイメージデータ(図1の102(2))が受容される。第2のビデオフレームの各々が複数のイメージ領域(図5の504)を含み、少なくとも1つの第2のビデオフレームの1つのイメージ領域内に第2のオブジェクトが存在する。本方法はまた、第1のイメージ領域内に存在する第1のオブジェクトの発生と第2のイメージ領域内に存在する第2のオブジェクトの発生との間の確率的な相関関係に基づいて、第1のイメージ領域と第2のイメージ領域との間の関係を決定する(図5の510〜512)。 (もっと読む)
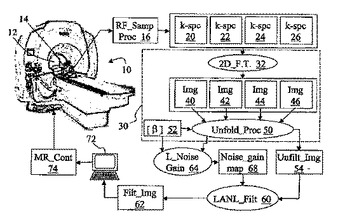
局所適応的な非線形ノイズ削減
撮像スキャナ(10)が撮像データを取得する。再構成プロセッサ(30)が撮像データを再構成してフィルタ処理前再構成画像にする。局所的ノイズマップ作成プロセッサ(64、120、136、140、142、152)が前記フィルタ処理前再構成画像における空間的変動のあるノイズ特性を表すノイズマップ(68、68′、68″)を生成する。局所適応的な非線形ノイズフィルタ(60)がノイズマップ(68、68′、68″)に従って前記フィルタ処理前再構成画像の異なる領域を異なる仕方でフィルタ処理してフィルタ処理済み再構成画像を生成する。
 (もっと読む)
(もっと読む)
高磁場磁気共鳴撮像のための適応的画像均一性補正
磁気共鳴撮像スキャナ(10)によって収集された磁気共鳴撮像データから補正済み再構成画像を生成する装置が、収集された磁気共鳴撮像データから補正済み再構成画像を再構成する再構成プロセッサ(44)を含む。パラメータ計算プロセッサ(52)が撮像対象の少なくとも一つの特性を決定する。補正パターン調整プロセッサ(54)が保存補正パターンの族から前記少なくとも一つの特性に基づいて補正パターンを選択する。画像補整プロセッサ(56)が前記未補正再構成画像を、前記選択された補正パターンを使って補正し、補正済み再構成画像を生成する。 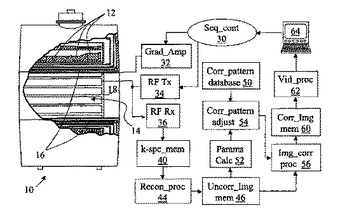 (もっと読む)
(もっと読む)
分類プロセスへの空間的知見の組込み
発明者は対象の空間的位置に基づく複数の異なる分類子を使用することを提案する。このアプローチの背景には、複数の分類子の方が特徴空間全体をカバーする“ユニバーサル”分類子よりも正確に局所コンセプトを学習できるのではないか、という直感的なアイデアがある。局所分類子を採用すれば、特定の類に属する複数の対象がこの特定類中において互いに高度の類似性を有することになる。局所分類子の採用は、特に分類子がカーネル方式である場合、メモリー、ストレージ及び性能全般の向上にもつながる。ここで使用する語“カーネル方式分類子”とは元の訓練データを、分類タスクを容易にする、より高い次元の空間にマップするためにマッピング機能(即ち、カーネル)が使用されている分類子を意味する。 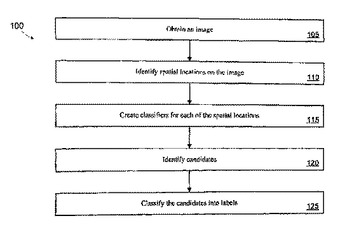 (もっと読む)
(もっと読む)
マイクロ流体装置用の画像処理方法およびシステム
マイクロ流体装置の画像を処理する方法である。この方法は、マイクロ流体装置の第1画像を受信する。第1画像は第1状態に関連している。さらに、この方法は、マイクロ流体装置の第2画像を受信する。第2画像は第2状態に関連している。さらに、この方法は、第1画像と第2画像を第3座標空間に変換する。さらに、この方法は、変換された第1画像と変換された第2画像に関連した情報に少なくとも基づいて第3画像を取得し、また、第1状態と第2状態に関連した情報を取得するべく第3画像を処理する。 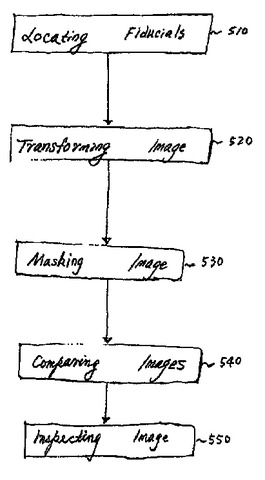 (もっと読む)
(もっと読む)
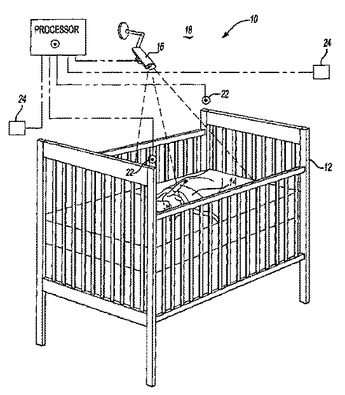
就寝中の乳幼児を監視する方法
コントローラに第1の複数のピクセルの位置情報を信号送出することによって、幼児の参照イメージを生成する、突然死症候群に関連する幼児の危険度の高い動きを検出する方法。第1の複数のピクセルは参照イメージを生成するコントローラに保持される。幼児の第2の電子イメージがそのコントローラに信号送出される第2の複数のピクセルを生成している。このコントローラは、その幼児が危険度の高い動きをしたかどうかを決定するために、第1の複数のピクセルと第2の複数のピクセルとの相関関係を検出することにより、第2の電子イメージを第1の電子イメージと比較する。
 (もっと読む)
(もっと読む)
信号処理装置、信号処理プログラム、および電子カメラ
【課題】本発明は、画素信号の解析結果に応じて空間周波数フィルタを調整するに際し、画素信号のノイズにより空間周波数フィルタが敏感に変動してしまう問題を解決する。
【解決手段】本発明の信号処理装置は、入力された画素信号に対して空間周波数フィルタをかけてノイズ除去および/または輪郭強調の信号処理を施す信号処理部と、空間周波数フィルタの係数群に適正係数群を設定する係数適正化部とを備える。この係数適正化部は、下記の解析部、対応設定部、および係数決定部を含む。まず、解析部は、信号処理の対象画素を含むように局所域を設定し、局所域の複数の画素信号を処理して平均的な色情報(以下『平均色情報』という)を求める。対応設定部には、『平均色情報』と『適正係数群』との対応関係が予め設定される。係数決定部は、解析部で求めた平均色情報に基づいて、対応設定部の対応関係を照合し、処理対象の画素に使用する適正係数群を調整する。
(もっと読む)
構成要素に基づいた物体の同一性確認システムを訓練するシステム及び方法
構成要素に基づいた顔認識システムを訓練するために、事例として用いる構成要素を決定するシステムと方法が提示される。一つの実施形態においては、構成要素の初期の形状と大きさが決定され、訓練集合が構築され、構成要素認識分類器が訓練され、そして分類器の精度が予想される。構成要素は四方向(上、下、左および右)のそれぞれの方向へ暫定的に拡張され、分類器の精度に及ぼす影響が決定される。その後、構成要素は分類器の精度を最大化する方向へ拡張される。処理は分類器の精度を最大化するために多数回実行しても良い。  (もっと読む)
(もっと読む)
3,201 - 3,220 / 3,240
[ Back to top ]