
Fターム[5B080AA08]の内容
Fターム[5B080AA08]の下位に属するFターム
二次曲面 (17)
自由曲面(パラメトリック曲面) (63)
ポリゴン(多角形) (953)
Fターム[5B080AA08]に分類される特許
1 - 20 / 51
画像処理装置、画像処理方法、および画像ファイルのデータ構造
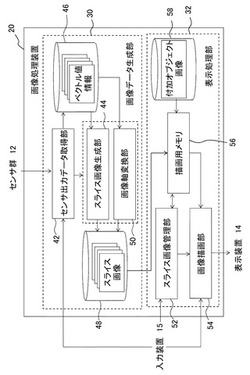
【課題】積層画像情報を3次元オブジェクトとして容易に可視化する。
【解決手段】画像処理装置20において画像データ生成部30のセンサ出力データ取得部42は、センサ群12から積層画像情報のデータを取得する。スライス画像生成部44は、分布を取得したスライス平面ごとに2次元画像のデータを生成する。画像軸変換部50は、センサ軸と異なる軸と垂直な複数の平面に対し同様の2次元画像のデータを生成する。表示処理部32のスライス画像管理部52は、視点の位置などに応じて描画に用いるスライス画像を管理する。描画用メモリ56は描画に必要な画像のデータを逐次格納する。付加オブジェクト画像記憶部58はカーソルなど付加的に表示するオブジェクトの画像データを格納する。画像描画部54はスライス画像のデータを用いて3次元オブジェクトを描画する。
(もっと読む)
記述子を用いて3Dオブジェクトまたはオブジェクトを表す方法

【課題】オブジェクトの3Dモデルのデータベースを用いて、3Dシーンのスキャナーによって取得されるクエリ2.5D距離画像においてオブジェクトを検出する方法を提供する。
【解決手段】3Dオブジェクトが記述子によって表され、3Dオブジェクトのモデルは、3D点群である。3D点群における各点pの局所サポートの位置が特定され、局所サポートの基準x軸、y軸及びz軸が生成される。基準x軸、y軸及びz軸に従って、点pを中心とするxy平面上の方位角方向及び動径方向に沿って、極座標格子が、この格子上の各パッチが2Dヒストグラムのビンであるように適用され、2Dヒストグラムは、格子上の2D行列Fであり、2D行列Fの各係数は、格子上のパッチに対応する。各格子位置(k,l)に対して、仰角値F(k,l)が、パッチ内の3D点の仰角値を補間することにより推定され、点pの記述子が生成される。
(もっと読む)
骨格の角度制御方法,装置,及びプログラム
【課題】簡便な手法により,骨格モデルにおける各々の骨の回転(曲げ,捻り等)の制御を実現する。
【解決手段】親骨と子骨とが関節によって連結された骨格モデルにおいて,前記親骨に対する前記子骨の前記関節における角度範囲を制限することによって前記子骨の動作を制御するための方法であって,前記関節を中心とする球の球面上に,前記子骨の角度範囲の境界を定義する角度範囲境界円を設定する角度範囲境界円設定ステップであって,前記球の中心と前記角度範囲境界円とで形成される円錐の軸単位ベクトルu及び前記円錐の半頂角αによって前記角度範囲境界円を設定する,角度範囲境界円設定ステップと,前記軸単位ベクトルuと前記半頂角αと、前記子骨の向きを表す単位ベクトルvとを用いて、検査値を算出し,前記検査値に基づいて,前記子骨の角度が前記角度範囲の中にあるか否かを判定する,角度範囲判定ステップと,を有する。
(もっと読む)
仮想環境でのオクルージョンを推定する方法
【課題】仮想環境でのアンビエントオクルージョンをライブで推定して現実感のある表示の生成に必要な計算時間および/または計算パワーを最適化する。
【解決手段】仮想環境の点P16でのオクルージョンを推定するための方法に関し、点P16は、視点11から見える仮想環境の各点のうちの少なくとも幾つかをグループ化する表面Sに存在する。必要な計算時間を最小限としながら表示を改善するために、表面Sと基点として点P16を有する複数の半直線との交点403を推定するステップであって、交点403が複数の半直線の各半直線40を離散化することで推定されるステップ表面Sとの交点を有する複数の半直線の各半直線にオクルージョン因子を関連付けるステップであって、該因子が各交点403と点P16を隔てているオクルージョン距離Δ0の関数であるステップ、推定された交点403から点P16でのオクルージョンを推定するステップを含む。
(もっと読む)
3次元形状を3次元形状へ変換する方法
【課題】従来はジュフスコフスキー変換というものがあり、複素数Zを用いて、
ω=Z+bの2乗/Zという変換で、翼の形状が得られる変換があった。これは2次元形状しか得られず、実際の翼の形状のように3次元の翼の形状は得られなかった。
【解決手段】 そこで、iの2乗 =−1なる複素数iを用いてtの2乗=iと定義し、
T=a+bi+ct (a、b、cは実数)なる数で表される3次元の直交座標は
x=a 、y=b 、z=c で表される。この数を用いて、TからTへの変換を考えると3次元形状から3次元形状への変換が得られ、変換後の形状を用いて、新たな複雑な3次元の曲線、曲面、3次元形状を得る。
また、変換前の簡単な3次元形状、3次元動画と変換Tのみの記憶のみなら、コンピュータ上の記憶領域を削減できる。
(もっと読む)
プレビュー画像生成装置、プレビュー画像生成方法及びプレビュー画像生成プログラム
【課題】三次元インクジェットプリンタで印刷する場合に、任意の方向から見た印刷画像の状態を確認する。
【解決手段】プレビュー装置30は、画像を印刷するメディアMの形状情報を取得するメディア形状取得部31と、描画アプリケーションで作成された画像の二次元画像データを取得する画像データ取得部32と、メディアMに印刷する画像の印刷範囲を特定する印刷範囲特定部33と、二次元画像データをメディアMの印刷範囲に対応付けて、メディアMの表面形状に対応した三次元画像データを生成する三次元画像データ生成部34と、三次元画像データ生成部34で生成した三次元画像データを所定方向から見たプレビュー画像を生成するプレビュー画像生成部35と、プレビュー画像をディスプレイに表示させるプレビュー画像表示部36と、を備える。
(もっと読む)
設計支援システムおよび設計支援プログラム
【課題】測定点に含まれるノイズに起因するうねりおよび段差が解消された高品質の曲面を作成することができるシステム等を提供する。
【解決手段】本発明の設計支援処理システム100によれば、測定点に基づく基準曲面の曲率の変化率が制御されながら、基準曲面と測定点との間隔および基準曲面の曲率の両方に鑑みて最適な形態で基準曲面が補正された結果としての出力曲面が作成される。具体的には、設計者が意図した形状と、ノイズ(=設計者が意図していない形状)とが、第1制約条件により区分される。
(もっと読む)
デジタルピクチャを生成するための方法、デバイス、およびコンピュータ可読媒体
デジタルピクチャを生成するための方法が提供され、本方法は、複数の曲線の各々に関する3次元表現を受信するステップであって、各曲線が、3次元オブジェクトの形状を少なくとも部分的に表す、受信するステップと、3次元表現によって与えられた3次元情報を使用して、曲線の3次元表現に基づいて、複数の曲線を少なくとも1つの曲線グループにグループ化するステップと、曲線グループの曲線に基づいて、各曲線グループをピクチャエレメントに関連付けるステップと、ピクチャエレメントを使用して、デジタルピクチャを形成するステップとを含む。  (もっと読む)
(もっと読む)
情報処理装置、情報処理方法、及びプログラム
【課題】 対象物体の変形パラメータが未知の場合に、変形を高精度かつ高速に推定する仕組みを提供する。
【解決手段】 変形形状モデル生成手段が、第1の変形条件下の対象物体における第1の形状の情報と特徴領域の第1の位置情報とから、前記特徴領域の位置を基準とする前記第1の形状の変形をモデルとして生成し、
変形推定手段が、第2の変形条件下の前記対象物体における第2の形状の情報と前記特徴領域に対応する第2の位置情報に基づき、前記第1の位置と前記第2の位置を合わせ前記第1の形状を前記第2の形状に前記モデルを用いて変形推定する。
(もっと読む)
グラフィックイメージをレンダリングする方法
【課題】 携帯機器においてグラフィック・レンダリングの複雑度及び優先順位を定義する方法を提供する。
【解決手段】 位置、ポインティング方向及び振動率などの携帯機器によって測定され、感知されるものを含む携帯システムに対する様々な物理的状態及び係数に基づいて、携帯機器におけるグラフィック・レンダリングの複雑度及び優先順位を定義する方法が開示され記載される。特に、イメージ・タイプのユーザーインターフェースを有するハンドヘルド計算システムは、示されたイメージ及びシステムの全体速度の値を改善するために、そのハンドヘルド装置の瞬間的位置及び方向に応答して生成されるグラフィックイメージを含む。
(もっと読む)
超音波ボリュームデータ処理装置
【課題】三次元関心領域を用いたレンダリング処理により三次元画像を形成する場合にレンダリング開始面又はレンダリング終了面の湾曲に起因して三次元画像に縞模様が発生していた。
【解決手段】各レイ(視線)304上において所定間隔をもってサンプルポイント306が定められ、それらに対して個別的にボクセル演算が実行される。第1例(A)では、最終ボクセルのエコー値enに対して、そこから終了面302までの距離rに応じた重み付け処理が適用され、その上で最後のボクセル演算が実行される。第2例(B)では、終了面上に終了ボクセルが設定され、その場合においても距離rに応じてエコー値en+に対する距離rの重み付け処理が適用された上で、当該最終ボクセルに対してボクセル演算が実行される。レイの並び方向に輝度値の段差が生じることを軽減又は防止できる。
(もっと読む)
パノラマ画像表示装置およびパノラマ画像表示方法
【課題】撮影地点の異なるパノラマ画像を閲覧するための効果的なインタフェースを提供する。
【解決手段】
マーカー設定部12は、表示対象のパノラマ画像の撮影方向に他のパノラマ画像の撮影場所が存在する場合、その撮影方向に他のパノラマ画像が存在することを示すマーカーを前記表示対象のパノラマ画像に関連付ける。マッピング処理部14は、他のパノラマ画像のマーカーが関連付けられた前記表示対象のパノラマ画像をテクスチャとして3次元パノラマ空間にマッピングする。3次元画像生成部16は、表示対象のパノラマ画像の撮影場所を視点位置として、前記3次元パノラマ空間を指定された視線方向に見たときの3次元パノラマ画像を生成する。ユーザインタフェース部40は、表示された3次元パノラマ画像に対するユーザの指示を受け付ける。
(もっと読む)
2次元超音波映像に対応する2次元CT映像を提供するシステムおよび方法
【課題】3次元超音波映像と3次元CT映像との間に映像整合を行って2次元超音波映像に対応する2次元CT映像を提供するシステムを提供する。
【解決手段】関心物体に対する複数の3次元CT映像を形成するCT映像形成部と、少なくとも1つの3次元超音波映像を形成する超音波映像形成部と、前記複数の3次元CT映像と前記少なくとも1つの3次元超音波映像との間に映像整合を行って第1の変換関数を取得するプロセッサと、入力情報を受信する使用者入力部とを備え、前記超音波映像形成部は、前記少なくとも1つの3次元超音波映像から前記入力情報に対応する2次元超音波映像を形成し、前記プロセッサは、前記入力情報および前記第1の変換関数を用いて前記複数の3次元CT映像から複数の2次元CT映像を取得し、前記2次元超音波映像と前記複数の2次元CT映像との間に複数の類似度を検出して前記2次元超音波映像に対応する2次元CT映像を選択する。
(もっと読む)
プログラム、記憶媒体、及び空間曲線生成装置
【課題】空間曲線を生成させるに際し、迅速且つ制御性の高いコンピュータ処理を実現すること。
【解決手段】複数のパラメータで表現される空間曲線をコンピュータに生成させるためのプログラムであって、空間曲線の始点、終点の座標、これらにおける接線方向、及び複数のパラメータのうち一部を決定する手順と、決定されなかった未決定パラメータを探索する手順であって、所定のアルゴリズムに基づき選択された未決定パラメータを用いて生成される空間曲線が前記決定された終点における接線方向と略一致するまで、前記決定された空間曲線の始点の座標、始点における接線方向、終点の座標を満たしうる未決定パラメータを繰り返し選択する手順と、前記終点における接線方向が略一致すると判定されるに至った際に選択されていた未決定パラメータを用いて空間曲線を生成する手順と、を実行させるプログラム。
(もっと読む)
メッシュ切断方法、ミラーリング方法、メッシュ切断システム及びミラーリングシステム
【課題】メッシュ切断方法、メッシュ切断方法を用いたミラーリング方法、メッシュ切断システム及びミラーリングシステムを提供する。
【解決手段】複数のメッシュから構成された三次元の立体形状を直線状に切断するメッシュ切断方法は、立体形状のメッシュの上に切断線を引き、切断線がメッシュのメッシュ頂点を通過する場合に、切断線が通過するメッシュ頂点を交錯頂点リストに記憶し、切断線がメッシュのエッジと交錯する場合に、切断線と交錯するエッジを交錯エッジリストに記憶し、交錯エッジリストに記憶したエッジを構成するメッシュに対して分断形状処理によりそのメッシュを切断し、交錯頂点リストに記憶したメッシュ頂点に対して1隣接頂点が交錯頂点リストに記憶されている場合に、メッシュ頂点とその1隣接頂点との間の線分上を切断する。
(もっと読む)
画像処理装置、画像処理方法
【課題】 グラディエント・メッシュによるオブジェクトの近似を効率的に行うための技術を提供すること。
【解決手段】 境界補正部103は、オブジェクト領域を複数のメッシュに分割する。そして、オブジェクト領域の枠部上に位置する境界頂点が属するメッシュの、オブジェクト領域の内側への方向に沿った一辺上に位置する画素群のうち、この方向への色の変化量が閾値以下となる位置における画素を補正画素として特定する。そして、隣接する補正画素の間を結ぶ曲線を、それぞれの補正画素間について求め、求めたそれぞれの曲線で囲まれた領域を補正対象外領域として求める。そして、オブジェクト領域の枠部上に位置するそれぞれの画素の画素値として、補正対象外領域の枠部上の画素の画素値を割り当てることで、オブジェクト領域を更新する。
(もっと読む)
描画装置および方法
【課題】高速に描画処理を行う。
【解決手段】ベクタデータを輪郭線解析することにより直線輪郭および曲線輪郭のいずれか1以上に対応するデータを含むプリミティブデータを、曲面モデルが定義される空間と独立して図形を定義するとともに出力するラスタデータのピクセルの属性値を決定するために参照されるベクタ定義空間に生成する第1生成手段105と、曲面モデルに含まれる要素ごとに要素がベクタ定義空間のどの位置になるかを算出し、ベクタ定義空間で曲面モデルと図形に対応するデータとの関係を判定する第1判定手段102と、要素ごとに判定結果により、複数の要素から採用する要素を決定し、採用する要素を含む再定義曲面モデルを生成する第2生成手段103と、再定義曲面モデルとプリミティブデータとにより、出力するラスタデータのピクセルの属性値を生成する第3生成手段107と、を具備する。
(もっと読む)
描画装置および方法
【課題】オブジェクトの状況に応じて適したレンダリング方法を選択することができる。
【解決手段】ベクタデータを記憶する第1記憶手段104と、ベクタデータがレンダリングされる曲面モデルおよびベクタデータ定義位置を記憶する第2記憶手段101と、ベクタ定義空間上に少なくとも1つのプリミティブデータを生成する第1生成手段105と、ベクタ定義空間での曲面モデルを構成する要素とベクタデータとの関係を判定してモデル制御情報を得る判定手段102と、モデル制御情報を参照してベクタデータを再定義して再定義曲面モデルを得、再定義曲面モデルを構成する複数の要素が同一平面上にあるかどうかを判定する制御手段103と、複数の要素が同一平面上にある場合、平面に合わせてラスタデータを生成する第2生成手段109と、複数の要素が同一平面上にない場合、曲面に合わせてラスタデータを生成する第3生成手段107と、を具備する。
(もっと読む)
画像における陰影生成方法
本発明は、画像(10)中に陰影を生成する方法に関する。該方法は、ピクセルの配列を有する深さマップ(6)を計算する段階(E2)であって、深さマップ(6)のピクセルは、光源(2)から、ピクセルを通して見える、最も近い障害物(4)の一部までの深さを示す深さ値(dsm)に対応する値と関連付けられている段階と、画像(10)のピクセル(Pix)を通して見える点(P)を、光空間に投影する段階(E6)であって、投影の結果が深さマップ(6)のピクセル(11)である段階と、見える点(P)と光源(2)との間の距離(dp)を計算する段階(E7)と、深さマップ(6)のピクセル(11)に関連する深さ値(dsm)を読み出す段階(E8)と、を有し、画像(10)のピクセル(Pix)について、所定のベースバイアス(bbase)と、見える点(P)がある表面(3)の法線(N)及び見える点(P)における入射光の方向(L)の関係との関数として、適応的バイアス(b)を計算する段階と、画像(10)中の点(Pix)について、見える点(P)と光源(2)との間の距離(dp)を、対応する深さマップ値(dsm)と適応的バイアス(b)との和と比較する段階(E10)と、比較に応じて、点(Pix)を通して見える点(P)を、光が当たっている、または影になっているとラベリングする段階(E11、E12)とを有する。 (もっと読む)
画像生成システム、プログラム及び情報記憶媒体
【課題】エフェクト画像を描画する際の処理負荷を軽減しつつ、画像の劣化を回避することができるようにした画像生成システム、プログラム及び情報記憶媒体を提供すること。
【解決手段】オブジェクト空間を仮想カメラから見た画像を生成するための画像生成システムである。この画像生成システムは、エフェクト処理として、第1カラーバッファ24Aに描画された原画像を第1カラーバッファ24Aよりも解像度が低い第2カラーバッファ24Bに描画する処理と、エフェクト画像を第2カラーバッファ24Bに描画する処理と、第2カラーバッファ24Bに描画されたエフェクト画像を描画するピクセルを指定するステンシル画像を、原画像の奥行き値とエフェクト画像の奥行き値とに基づいて、第2カラーバッファ24Bよりも解像度が高いステンシルバッファ24Eに描画する処理と、第2カラーバッファ24Bに描画されたエフェクト画像を、ステンシル画像に基づいて第1カラーバッファ24Aに描画する処理と、を行う。
(もっと読む)
1 - 20 / 51
[ Back to top ]