
Fターム[5E313AA23]の内容
電気部品の供給、取付け (45,778) | 取扱物品の種類 (9,133) | 容器類 (656) | トレー、パレット、整列板 (481)
Fターム[5E313AA23]に分類される特許
181 - 200 / 481
電子部品実装装置
【課題】メンテナンスの作業性に優れた電子部品実装装置を提供する。
【解決手段】電子部品供給部から取り出した電子部品を基板に実装する実装ヘッドと、基板を保持する基板保持部と、ペースト供給テーブル9と、ペースト供給テーブル9から供給されるペーストを基板に転写する転写ヘッドを備えた電子部品実装装置において、ペースト供給テーブル9をペースト供給部移動機構40によって移動可能に構成し、ペースト供給テーブル9を転写時の位置とメンテナンス時の位置に移動できるようにした。
(もっと読む)
粘着保持トレー

【課題】粘着層の変形に支障を来たすことが少なく、電子部品の保持を容易にし、しかも、電子部品の面粗度に応じて粘着層の厚さや柔軟性を考慮する必要のない粘着保持トレーを提供する。
【解決手段】平面円形のトレー1と、このトレー1の平坦な表面2に周縁部が粘着固定されて半導体デバイス5を着脱自在に粘着保持する可撓性の粘着層10と、トレー1の中心部に穿孔されて粘着層10に被覆される真空防止孔14とを備える。また、トレー1の表面2と粘着層10の対向面に非密着加工をそれぞれ施し、粘着層10を非シリコーン系の材料により形成してそのトレー1の表面2に対する粘着固定部を半導体デバイス5の粘着保持領域13の外側とする。従来のトレー1の凸部を省略するので、半導体デバイス保持の困難化に伴い、輸送中の振動や衝撃で半導体デバイス5が衝突して欠け、割れが生じたり、パーティクルや異物が発生するのを防止できる。
(もっと読む)
撮像システムおよび電子回路部品装着機
【課題】イメージセンサを備え、より実用的な撮像システムを得る。
【解決手段】装着ヘッドが保持する複数種類の電子回路部品を撮像するにあたり、電子回路部品の各々について撮像エリア内にROIを設定し、電子回路部品毎に設定した画像データ取得条件に従って画像データを取得する。電子回路部品は種類により画像取得に適した露光時間を異にし、画像データ取得条件として設定した露光時間が4種類に異なる場合、最短の設定露光時間および4種類の設定露光時間を長さ順に並べた場合に互に隣り合う露光時間の差を各回露光時間として露光を4回行い、各回の露光により得た出力をROI毎に設定した組合わせで加算し、設定露光時間の画像データを取得する。複数種類の電子回路部品の像を撮像エリアに一斉に形成しながら、各部品に適した露光時間の画像データを得ることができ、また、出力の加算による画像データの取得により総露光時間を短縮することができる。
(もっと読む)
シールドケース部品用の吸着ノズルおよび部品実装装置
【課題】シールドケース部品を対象として汎用性に優れた吸着ノズルおよびこの吸着ノズルが装着された部品実装装置を提供することを目的とする。
【解決手段】部品実装装置の搭載ヘッドに装着されてシールドケース部品を真空吸着するシールドケース部品用の吸着ノズル31において、シールドケース部品の被吸着面に当接して吸着保持する吸着面33bが設けられ、本体部32の下面32bに着脱自在に装着された状態において吸着面33bに設けられた吸着孔33cが吸引開口部32dと連通する複数のノズルブロック33を備え、これらのノズルブロック33のうち少なくとも1つを本体部32の下面32bに沿ってスライドさせる構成とする。これにより、ノズルブロック33の間隔を吸着保持する対象のシールドケース部品に応じて調整することができ、複数種類のシールドケース部品を対象として、汎用性に優れた吸着ノズルを実現することができる。
(もっと読む)
部品供給用プレート収容体及び部品供給装置
【課題】複数の部品が配置された複数の部品供給用プレートを段積みして収容する部品供給用プレート収容体において、収容されている夫々のプレートの取り出しを確実かつ効率的に行なう。
【解決手段】プレート収容体が、夫々の支持ガイド部の組の間に配置されて、夫々のプレートと係合されることで、夫々のプレートのプレート供給方向における水平方向の支持姿勢を案内する複数の姿勢ガイド部を備えることで、プレート収容体へのプレートの収納姿勢を正常な状態に保持することができ、プレート収容体に対する夫々のプレートの収納及び取り出しを円滑に行なう。
(もっと読む)
電子部品実装装置
【課題】マガジンからパレットを取り出し、パレットに収納されている電子部品を基板に実装する電子部品実装装置において占有面積の小さい電子部品実装装置を提供することを目的とする。
【解決手段】マガジン4から取り出したパレット3を固定するパレット固定テーブル9に、パレット3の端部と連結する第1の固定部材7を水平旋回可能に配置し、パレット固定テーブル9をマガジン4に対して近接および離反する方向に移動可能にした。マガジン4に出し入れするときのパレット3の移動にパレット固定テーブル9による水平移動に加えて第1の固定部材7の水平旋回によるパレット3の水平旋回を併用することで、パレット3の水平移動距離を短縮することが可能になり、直動機構の小型化による電子部品実装装置1の小型化が実現できる。
(もっと読む)
電子部品実装装置
【課題】マガジンからパレットを取り出し、パレットに収納されている電子部品を基板に実装する電子部品実装装置において占有面積の小さい電子部品実装装置を提供することを目的とする。
【解決手段】マガジン4から取り出したパレット3を固定するパレット固定テーブル9に、パレット3の端部と連結する第1の固定部材7を水平旋回可能に配置し、パレット固定テーブル9をマガジン4に対して近接および離反する方向に移動可能にした。マガジン4に出し入れするときのパレット3の移動にパレット固定テーブル9による水平移動に加えて第1の固定部材7の水平旋回によるパレット3の水平旋回を併用することで、パレット3の水平移動距離を短縮することが可能になり、直動機構の小型化による電子部品実装装置1の小型化が実現できる。
(もっと読む)
部品実装装置および部品実装方法
【課題】不必要の塗膜形成動作を反復して実行することによる作業効率の低下を防止することができる部品実装装置および部品実装方法を提供すること。
【解決手段】下面にバンプが形成され平面形状が異なる複数種類の部品にペーストを転写して基板に実装する部品実装装置において、転写ステージ21bにおいて塗膜が既に転写動作に供されたか否か示す転写情報を、部品のサイズと関連づけて転写ステージを区分した単位区画B毎に記憶させておき、転写ステージ21bの塗膜形成面にペーストの塗膜を形成する塗膜形成工程において、実装対象の部品の部品情報および転写情報を参照することにより、当該転写動作に供することが可能な未転写区画の有無を判断し、未転写区画が無いと判断された場合にのみ塗膜形成動作を実行させるようにする。これにより、不必要の塗膜形成動作を反復して実行することによる作業効率の低下を防止することができる。
(もっと読む)
部品実装装置
【課題】基準位置パラメータの設定作業の作業効率を改善するとともに、治具の管理におけるトレーサビリティを確保することができる部品実装装置を提供することを目的とする。
【解決手段】対象となる部品の種類に応じて複数の作業ヘッドに交換自在に装着される複数の作業ツールを収納するツールストッカ15において予め指定された治具専用位置15bに、複数の駆動軸のマシンパラメータにおける動作基準位置を設定するために共通に用いられる高さ用治具74、センタ位置用治具75、回転位置用治具76を収納しておき、ティーチング処理部に複数の作業ヘッドにこれらの治具を装着するための治具装着動作および動作基準位置の設定に必要なデータを取得するためのデータ取得用動作を自動的に行わせる構成とする。
(もっと読む)
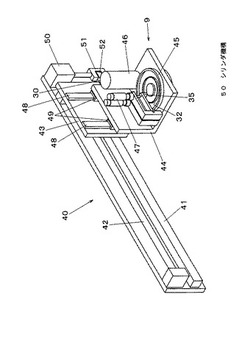
樹脂塗布装置
【課題】簡便な機構によって樹脂の滴下を有効に防止することができる電子部品接着用の樹脂塗布装置を提供する。
【解決手段】基板に電子部品接着用の樹脂を塗布する樹脂塗布装置において、塗布ノズル20bから滴下する樹脂を受け止めて捕集する液滴捕集部材50の位置を、塗布ユニット20A,20Bの昇降動作をリンク部材43によるリンク機構を用いて水平移動動作に変換することにより、塗布ノズル20bの直下に位置して液滴の捕集が可能な液滴捕集位置と、塗布ノズル20bによって樹脂を吐出して基板に塗布する塗布動作を阻害しない塗布動作位置とに選択的に切り換える。これにより、別途専用の駆動源を必要とすることなく、簡便な機構によって樹脂の滴下を有効に防止することができる。
(もっと読む)
電子部品実装装置及び電子部品実装方法
【課題】ペースト膜の成膜不良に起因する電子部品の装着ミスの発生を防止することができる電子部品実装装置及び電子部品実装方法を提供する。
【解決手段】テーブル21の上方を移動自在に設けられた基板カメラ6により、ペースト膜pmの中の部品Pを接触させる位置として予め定められた部品接触位置Mの撮像を行う。そして、得られた画像に基づいて、テーブル21上に形成されたペースト膜pmの成膜状態の良否を判定し、ペースト膜pmの成膜状態が良好であると判定された場合に、そのペースト膜pmの部品接触位置Mに部品Pを接触させ、これによりペーストPTが付着した部品Pを基板PBに装着する。
(もっと読む)
電子部品実装装置及び電子部品実装方法
【課題】ペースト膜の成膜不良に起因する電子部品の装着ミスの発生を防止することができる電子部品実装装置及び電子部品実装方法を提供する。
【解決手段】テーブル21の上方を移動自在に設けられた基板カメラ6により、テーブル21上に形成されたペースト膜pmの、スキージ23のテーブル21に対する相対移動方向と直交する方向に対向する両辺それぞれの中央部近傍の所定領域Qの中から選定したサンプル領域Sの撮像を行う。そして、得られた画像に基づいて、テーブル21上に形成されたペースト膜pmの成膜状態の良否を判定し、ペースト膜pmの成膜状態が良好であると判定された場合に、そのペースト膜pmに部品Pを接触させ、これによりペーストPTが付着した部品Pを基板PBに装着する。
(もっと読む)
移動体の移動装置および電子部品実装装置ならびに移動体の位置決め制御方法
【課題】直交ロボットの停止特性を考慮して移動体の移動経路を設定する移動体の移動装置および電子部品実装装置ならびに移動体の位置決め制御方法を提供する。
【解決手段】出発点Oから実装点Aに移動する場合、ノズルは出発点Oと実装点Aを直線で結ぶ破線L1で示した最短の経路ではなく、中継点Dを経由する実線L2、L3で示す経路を選択する。実装点Aから次の実装点Bに移動するときは、実装点Bに対し、実装点Aに対する中継点Dと同じ位置関係となる中継点Eを経由する。さらに実装点Bから次の実装点Cに移動するときも、同様に中継点Fを経由する。実装点A、B、Cと中継点D、E、Fを結ぶ経路L3、L6、L7は全て同方向、同距離であり、ノズルはこれらの経路を同じ加速度で移動する。これにより直交ロボットの停止特性が全ての実装点において同じ条件となり、相対的な位置決め精度が向上する。
(もっと読む)
粘着テープ及び該粘着テープを含む積層体の作製方法
【課題】シリコーンを含まずかつ比較的に低コストで製造できる耐熱性粘着テープを提供する。
【解決手段】プリント配線板用のキャリア基材と、プリント配線板をキャリア基材に仮固定するための粘着テープを含む積層体の作製方法であって、
(メタ)アクリル酸及びグリシジル(メタ)アクリレートを含むモノマーを共重合することで得られる特定の共重合体を含む第一の粘着剤層を形成すること、
(メタ)アクリル酸及びグリシジル(メタ)アクリレートを含むモノマーを共重合することで得られる特定の共重合体を含む第二の粘着剤層を形成すること、
前記第一の粘着剤層と前記第二の粘着剤層をそれぞれ最外層として含む、粘着テープを形成すること、
前記粘着テープの前記第二の粘着剤層をキャリア基材に貼り合わせ、前記粘着テープの前記第一の粘着剤層を最上層として載置すること、及び、
前記キャリア基材上で、前記第二の粘着剤層と、前記第一の粘着剤層を架橋させることを含み、前記粘着テープは多層粘着テープ又は両面粘着テープである、積層体の作製方法。
(もっと読む)
部品実装装置及び部品実装方法
【課題】基板の大きさにかかわらず、部品保持、部品認識、部品実装間の部品保持部材の移動距離が短くすることができて実装時間を短くすることができ、実装効率を高めることができる部品実装装置を提供する。
【解決手段】基板搬送位置で、第1基板搬送保持装置と第2基板搬送保持装置を隣接させて部品を実装すべき基板の搬入又は搬出を行う一方、搬入後は、それぞれ基板を保持してそれぞれの基板搬送位置に移動して独立して部品を実装することができるように構成する。
(もっと読む)
真空吸着ノズル
【課題】 実装する吸着物の小型・軽量化・多機能化に応え高密度実装を可能とするため真空吸着ノズルも小型化しており、磨耗が少なく吸着時の衝撃荷重に耐えるとともに、滑り等による吸着物の吸着ずれや落下がなく確実に吸着物を吸着し、この吸着した吸着物を素早く回路基板に装着して吸着物を離すという実装の高速化および高密度化に対応可能な真空吸着ノズルを提供する。
【解決手段】 吸着物を真空吸着する吸着面2がセラミックスからなり、吸着面2に吸引孔3を備えた真空吸着ノズル1であって、吸着面2のセラミックスが、セラミックスを構成する主成分と、主成分の結晶粒子の平均結晶粒径よりも大きい平均結晶粒径を有する結晶粒子の第2成分とを含み、吸着面2において、主成分の結晶粒子が第2成分の結晶粒子よりも突出している真空吸着ノズル1である。
(もっと読む)
電子部品搬送装置及び電子部品搬送装置のクリーニング方法
【課題】微小パーティクルを効率よく除去する。
【解決手段】半導体素子のような電子部品を収納し、当該電子部品を搬送する電子部品搬送装置10Aは、電子部品が搭載される複数の電子部品支持部11と、複数の電子部品支持部11を個々の電子部品支持部11に画定する突起部12,13,14と、を備えている。そして、電子部品支持部11と突起部12,13,14の間の第1の領域並びに突起部12,13,14の端間の第2の領域とが電子部品搬送装置10Aの下面10bから同一の高さに構成されている。このような電子部品搬送装置10Aであれば、微小パーティクルが第1の領域及び第2の領域で滑降し、当該微小パーティクルが効率よく除去される。
(もっと読む)
電子部品の装着方法、電子部品装着装置、電子部品装着装置の電子部品装着順序決定方法及び電子部品装着装置の装着データ作成方法
【課題】一方の側の部品供給装置おいて、部品供給ユニットの交換作業が行われる場合でも、一方の側のビームの稼動状況を向上させて生産効率の向上を図る。
【解決手段】手前側の部品供給装置3の部品供給ユニット13の交換作業時には、手前側のビーム8は奥側の部品供給装置5側に乗り入れ、装着ヘッド11は装着ヘッド10と同様に搬送装置2上のプリント基板Pと部品供給装置5との間を移動し、各装着ヘッド10、11に設けられた吸着ノズルにより部品供給装置5から電子部品を取出してプリント基板P上に装着する。
(もっと読む)
部品実装装置および部品実装方法
【課題】ヘッド等の駆動誤差に起因する部品の搭載誤差を基板の生産性を損なうことなく検知する。
【解決手段】部品実装用のヘッド8を備えたヘッドユニット7により部品を保持して実装作業位置の基板P上に実装する部品実装装置において、実装作業位置の基板Pよりも外側に配置される模擬実装用のテーブル20と、このテーブル20上に搭載される治具部品を撮像可能な基板認識カメラ9とを有するとともに、前記ヘッド8によりテーブル20上に治具部品を搭載すると共に当該部品を基板認識カメラ9により撮像することにより、その画像データに基づき目標位置に対する治具部品の搭載誤差を演算する所定のキャリブレーション処理を実行する制御部を有する。
(もっと読む)
部品供給装置
【課題】ウェハパレットとトレイパレットを混載可能な部品供給装置において、部品装着機に供給する部品の種類に応じて適切なピックアップ方法を選択できるようにする。
【解決手段】部品の種類に応じてパレットの引き出し位置と部品のピックアップ方法を選択する。例えば、小チップのウェハ部品21の場合は、マガジン保持部12内のマガジンから部品装着機用引き出し位置に引き出したウェハパレット22上のウェハ部品21を部品装着機25の装着ヘッドで直接ピックアップする。上記以外のサイズのウェハ部品21の場合は、マガジンからサブロボット用引き出し位置に引き出したウェハパレット22上のウェハ部品21をサブロボット15でピックアップし、当該ウェハ部品21をシャトル機構16のシャトルノズル26で受け取って所定のピックアップ位置まで移送し、このピックアップ位置で、部品装着機25の装着ヘッドでピックアップする。
(もっと読む)
181 - 200 / 481
[ Back to top ]