
Fターム[5F031GA03]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | フォーク (2,669) | 複数のフォークを備えたもの (468)
Fターム[5F031GA03]の下位に属するFターム
各フォークを独立して動かせるもの (148)
Fターム[5F031GA03]に分類される特許
121 - 140 / 320
基板処理装置

【課題】キャリアから処理ブロックへの基板の払い出しを速やかに行うこと。
【解決手段】ウエハ搬入部211にてウエハWが払い出されたキャリアCを退避用載置部22に移載すると共に、ウエハ搬入部211に未処理ウエハWを収納した新たなキャリアを移載し、この新たなキャリアから処理ブロックS2へウエハWを受け渡すにあたり、例えば100枚のウエハWを棚状に保持する基板保持部4を用意し、キャリアCからウエハ移載手段A1によりこの基板保持部4に5枚のウエハWを一括して移載し、次いで基板保持部4から受け渡し手段A2により処理ブロックS2に一枚ずつウエハWを受け渡す。基板保持部4には一度に5枚のウエハWが受け渡される一方、基板保持部4から取り出されるウエハWは一枚ずつであるので、処理ブロックS2へのウエハの払い出しが途切れることがなく、当該ウエハWの払い出しを速やかに行うことができる。
(もっと読む)
基板処理装置

【課題】スループットや熱応答性の低下を防止しつつ、低温で熱処理を施す。
【解決手段】複数枚のウエハ1を一括して処理する処理室内に複数枚のウエハ1を保持して搬入するボート50に、ウエハ1を1枚ずつ保持するヒータプレート60を複数枚設け、各ヒータプレート60はウエハ1よりも大径の円盤形状に形成する。ヒータプレート60には第一発熱線61および第二発熱線62を設け、第一発熱線61および第二発熱線62は炭化シリコン、ポリシリコン、石英等で形成したカバー63で被覆する。第一発熱線61および第二発熱線62は抵抗発熱体で直径10mm以下の線形状に形成し、電力制御装置65をそれぞれ設ける。各ヒータプレート60上に各ウエハ1を一枚ずつ載置して、ウエハ1を熱伝導によって加熱することで、熱応答やスループットを高める。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチを変えるピッチ変更機構を備えている場合であっても、小型化することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットを構成する基板搭載機構3は、上下方向に重なるように配置され基板が搭載される搭載部13〜17間のピッチを変えるピッチ変更機構26と、上下方向に移動可能な複数の可動ハンド18〜21とを備えている。ピッチ変更機構26は、Y方向を軸方向として配置される支点軸に回動可能に支持され可動ハンド18〜21が連結されるレバー部材52、53と、レバー部材52、53を回動させる駆動機構58とを備え、可動ハンド18〜21とレバー部材52、53との連結部となるハンド連結部は、レバー部材52、53に取り付けられY方向に突出する突出部材と、可動ハンド18〜21に取り付けられ突出部材が係合する係合溝が形成されるガイド部材とを備えている。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチの変更動作を行う場合であっても、構成の簡素化が可能でかつハンドに搭載される基板を適切に把持することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットは、所定のピッチで上下方向に重なるように配置される基板の搭載部を有する複数のハンドと、搭載部間のピッチを変えるピッチ変更機構と、ハンドに搭載される基板を把持するための把持機構24とを備えている。把持機構24は、複数の基板の把持部80と、基板の把持方向へ把持部80を付勢する複数の付勢部材と、把持部80に当接して基板からの退避方向へ複数の把持部80を移動させる移動部材82とを備えている。複数の把持部80および複数の付勢部材のそれぞれは、複数のハンドのそれぞれに保持され、移動部材82は、把持部80が基板を把持しているときに把持部80から離れている。
(もっと読む)
半導体ウエハに被膜を形成する装置
【課題】 被膜形成処理を連続的に実施可能な技術を提供する。
【解決手段】 被膜形成装置は、半導体ウエハを保持するウエハホルダと、搬入口から加熱管内に順次搬入される複数のウエハホルダを一連に支持しながら搬出口へと搬送する搬送手段と、加熱管内にガスを供給する第1ガス供給手段と、加熱管内のガスを外部に排出するガス排出手段を備えている。各々のウエハホルダは、保持した半導体ウエハを取り囲む枠体を有しており、搬送手段によって一連に支持された複数のウエハホルダは、それらの枠体が連なって搬入口から搬出口まで伸びる反応空間を形成する。第1ガス供給手段は、熱分解すると単独でも被膜を形成し得る第1種類のガスを、枠体の内側に形成される反応空間に供給し、ガス排出手段は、枠体の内側に形成される反応空間のガスを外部に排出するように構成されている。
(もっと読む)
半導体製造装置
【課題】基板移載作業の効率化を図ることができる半導体製造装置の提供を目的とする。
【解決手段】移載機14は、ボートの両端側にサイドダミー基板をそれぞれ移載した後、両サイドダミー基板の間に処理用基板を移載する。この移載機14が移載作業を開始する前に、操作部3の移載方式選択手段8により第1の移載方式を選択すると、処理用基板の移載状態に関わらず、一旦ボートの所定位置に積載したサイドダミー基板を移動させることがなく、短時間で基板の移載作業を終了する。操作部3の移載方式選択手段8により第2の移載方式を選択すると、処理用基板の移載状態に応じて、一旦ボートの所定位置に積載したサイドダミー基板を移動させ、処理用基板の処理に最適な位置へサイドダミー基板を配置する。
(もっと読む)
電子デバイス製造において基板を搬送するためのロボットシステム、装置、および方法
基板搬送システム、装置、および方法が説明される。これらのシステムは、目的地の近傍の位置までブームリンク装置を回転させ、次いで目的地にて基板を配置または取り出すようにロボットアセンブリを作動させることにより、目的地にて基板を効率的に配置するまたは取り出す。多数の他の態様が提示される。  (もっと読む)
(もっと読む)
基板処理装置
【課題】支持具に支持される基板間のピッチを縮小し、処理枚数を増大させることができる基板処理装置を提供する。
【解決手段】熱処理装置10は、基板72を処理する反応炉40と、反応炉40内で基板72を支持する支持具30とを有し、支持具39は、基板72と接触する支持板58と、支持板58を支持する支持片66とを有し、支持片66はスケルトン構造であり、支持板58には少なくとも一つの貫通孔84が設けられ、支持片66は貫通孔84とは重ならないように構成されている。
(もっと読む)
ガラスシートを高速で輸送する方法及び装置
本発明は、光電池素子の製造のための大規模生産プラントにおける異なる生産ステーション間でガラスシートを高速輸送するための方法及び装置に関し、前記生産プラントはクリーンルーム条件を前提とし、a)昇降ガントリーを搬送するための自由に移動可能な台座と、b)伸縮自在なジャッキ板によってガラスシートを垂直方向に輸送するための少なくとも1つの垂直昇降籠であって、前記板は2つの反対方向に伸張可能であり、局部的に下降及び上昇する機能を有し、ガラスシートを連続的に、前記垂直昇降籠の一方から他方に輸送することができ、c)クリーンルームにおける運転のために、耐摩耗性材料で製造され、排気を出さないようにカプセルに包まれた機械的な動作部分、及びd)台座を動作させるためのケーブルレス電力供給ユニットを備えたことを特徴とする。 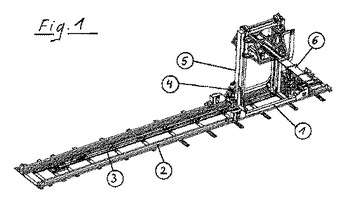 (もっと読む)
(もっと読む)
基板処理装置
【課題】 基板の搬送効率を高め、基板処理工程の生産性を向上させる。
【解決手段】 複数枚の基板を保持するロードロック室と、ロードロック室内に連通可能な第1搬送室と、第1搬送室内に連通可能で基板を処理する第1処理室と、第1搬送室内に連通可能な中継室と、中継室内に連通可能な第2搬送室と、第2搬送室内に連通可能で基板を処理する第2処理室と、ロードロック室、第1処理室、中継室間での基板の搬送を行う第1搬送ロボットと、中継室、第2処理室間での基板の搬送を行う第2搬送ロボットと、第1搬送ロボットによる第1処理室内外への基板の搬送時間帯が、第2搬送ロボットによる第2処理室内外への基板の搬送時間帯と少しでも重なり合うように、第1搬送ロボット及び第2搬送ロボットを制御する制御部と、を備える。
(もっと読む)
基板処理装置
【課題】端数が発生した場合であっても、通常の処理時と同様に処理する。
【解決手段】二枚葉半導体製造装置において、1枚の端数ウエハ1が発生した場合には端数集積搬送フローを実行する。外側移載装置30は第一ロードロック室14aの支持台20の最後段の載置部28のウエハ1を下フィンガー32bによって掬い取る。続いて、外側移載装置30は下フィンガー32bでウエハ1を保持したフィンガーアッシー32を第二ロードロック室14bに移動させ、第二ロードロック室14bの支持台20の第1段目の載置部28のウエハ1を上フィンガー32aによって掬い取る。次に、外側移載装置30は上フィンガー32aおよび下フィンガー32bによってウエハ1、1を保持したまま、フィンガーアッシー32を第一処理室16aに移動させ、第一処理部36の上方にて停止する。第一処理部36は通常の二枚葉処理を実施する。
(もっと読む)
ロードロック装置および真空処理システム
【課題】 多段の真空予備室を有するロードロック装置において、隔壁の変形に起因するパーティクルの発生を防止する。
【解決手段】 ロードロック装置5は、隔壁47によって隔てられた上下2段の真空予備室27a,27bを有している。隔壁47には、上下に貫通する一対のスリット101、102が形成されている。スリット101の内部は空洞で、スリット101の上下の開口部分は、弾性板61によって封止されている。スリット101内には、スリット101の幅方向に加わる圧縮力に抗するように補強部材71が配備されている。隔壁47には、スリット101,102の内部からシール面47a,47bにそれぞれ達する圧力調整孔50が設けられている。
(もっと読む)
移送ロボットおよび移送ロボットの制御方法
【課題】本発明は、比較的小さな設置面積に配置でき、上下への昇降範囲が広くできるとともに、安全にワークを移送することが可能な移送ロボットを提供する。
【解決手段】搬送物を載置するハンド部14と、前記ハンド部14を一方向に移動させるアーム機構30と、アーム機構30を上下に移動する昇降機構20を備えた移送ロボットにおいて、前記昇降機構20が、ベース部材2に備えられた少なくとも2組のリンク機構から構成され、リンク機構の関節軸の方向がハンド部14の移動方向と同じとなるよう配置し、ハンド部14が2組のリンク機構の間で昇降するよう動作させる。また、ハンド部14のローリング方向、横ずれ動作などを行なう。
(もっと読む)
基板処理システム
【課題】基板を収容するための基板収容部と、上下方向に複数段設けられた各基板処理ユニットとの間で複数の基板を効率的に搬送することができ、このため単位時間あたりの基板の処理枚数を多くすることができる基板処理システムを提供する。
【解決手段】基板処理ユニット40と基板収容部30との間で基板Wの搬送を行う第2の基板搬送装置60a、60bは、複数の基板処理ユニット40が区分けされる各グループに対応するよう上下方向に複数段設けられている。また、第1の基板搬送装置50により基板収容部30に搬送された、基板処理ユニット40により処理される前の基板W、および第2の基板搬送装置60aにより基板収容部30に搬送された、基板処理ユニット40aにより処理された基板Wを、それぞれ、基板収容部30における上下方向の別の位置に移し換えるための基板移し換え装置35が設けられている。
(もっと読む)
基板搬送方法、基板処理方法および半導体装置の製造方法
【課題】窒素ガスパージに伴うウエハ位置ずれによるウエハ移載ミスを防止する。
【解決手段】ポッド10とボートとの間でウエハ9を授受するウエハ授受ポートにポッド10のドア10aを着脱してウエハ出し入れ口10bを開閉するポッドオープナを設け、ウエハ出し入れ口22を被覆する筐体60を設け、筐体60にはクロージャ収容室61に窒素ガス62を流通させる給気管63、排気管64を接続する。ポッドの開放時に窒素ガス62をクロージャ収容室61、ウエハ収納室10cに吹き込み、窒素ガスパージする。その後、クロージャ40でドア10aをウエハ出し入れ口10bへ嵌入し、ドア10aでウエハ9群をウエハ収納室10c内に押し込み、窒素ガスパージによるウエハ位置ずれを解消させる。
(もっと読む)
基板処理装置
【課題】ウエハ面内膜厚分布均一性の低下を防止する。
【解決手段】複数枚のウエハ1を一括して収容する処理室32と、3本の保持柱25cで複数枚のウエハを積層保持するボート25と、ボート25を回転させる回転駆動装置28と、処理室32内に処理ガスを噴出する吹出口46と、を有する基板処理装置において、コントローラ60は回転駆動装置28を回転速度と角度位置とをパラメータとして制御し、保持柱25cの角度位置に応じてボート25を回転させる速度を増減させる。
(もっと読む)
アライメント装置、基板接合装置および積層型半導体装置の製造方法
【課題】位置合わせ精度の高いアライメント装置。
【解決手段】重ね合わされる一対の基板を位置合わせするアライメント装置であって、一対の基板の一方を保持する基板保持部と、一対の基板の他方を保持して変位する移動ステージと、移動ステージを移動させる駆動部と、移動ステージと共に駆動部により移動されつつ、一方の基板を撮像する顕微鏡と、顕微鏡と共に駆動部により移動されつつ、顕微鏡の観察対象領域を照明する照明光を発生する照明部とを備える。
(もっと読む)
試料位置検知端部エフェクタおよびその使用方法
【課題】ウエハの引っ掻き傷や粒子による汚損を最少にして半導体ウエハを確実に移送し得る試料把持用端部エフェクタを提供すること。
【解決手段】光源、及び受光部に作動するように連結された本体を有する端部エフェクタを設け、前記光源、及び受光部は離間するそれぞれの光源光路開口、及び受光路開口を有し、これ等開口の間に光透過路に沿って光ビームが伝搬し、これ等光ビームが既知のビーム形状であるように前記光源光路開口、及び受光路開口の寸法を定め、前記試料と本体との空間を狭くするため、これ等試料と本体との間の相対運動を与え、前記相対運動を与えることに組み合わせて、前記光透過路に交差するように前記試料を位置決めする。
(もっと読む)
搬送装置及び真空処理装置
【課題】簡素な構成で旋回半径を小さくすることができ、しかも搬送速度が大きい搬送装置を提供する。
【解決手段】本発明の搬送装置1は、一方の端部A、Bに第1及び第2の駆動軸11、12が同心状に配設された第1及び第2のアーム21、22を有する。第1及び第2のアーム21、22の他方の端部C、Dには、第3及び第4のアーム23、24の一方の端部E、Fが、支軸23a、24aを中心としてそれぞれ回転自在に取り付けられている。第3及び第4のアーム23、24は、その他方の端部G、Hが、連結軸30aを中心として同心的に回転できるように構成されている。第2のアーム22の駆動軸12の回転動力を第3のアーム23に伝達するための第1の動力伝達機構4と、第1のアーム21の一方の端部Cにおける回転動力を連結軸30aに伝達するための第2の動力伝達機構5が設けられている。
(もっと読む)
基板処理装置
【課題】2枚の基板受載板を用いて基板を搬送する場合でも基板検出センサが正確にウェーハの有無を検出することができ、又空間的な制約を受けにくい基板処理装置を提供する。
【解決手段】上下2枚の基板受載板81,82を用いて基板12を搬送する基板搬送モジュール部4を具備する基板処理装置に於いて、上受載板と対向可能な位置に上反射型光基板検出器85を設けると共に、下受載板と対向可能な位置に下反射型光基板検出器88を設け、前記上反射型光基板検出器が光を射出し、前記下受載板に反射された光を前記上反射型光基板検出器が受光するかどうかで基板の有無を検出し、前記下反射型光基板検出器が光を射出し、前記上受載板に反射された光を前記下反射型光基板検出器が受光するかどうかで基板の有無を検出する。
(もっと読む)
121 - 140 / 320
[ Back to top ]