
Fターム[5F031GA18]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | フック (53)
Fターム[5F031GA18]の下位に属するFターム
容器等の吊具 (38)
Fターム[5F031GA18]に分類される特許
1 - 15 / 15
真空処理装置
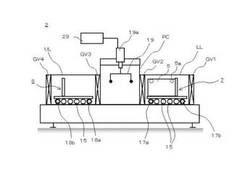
【課題】成膜処理の生産性の向上を図ることができ、且つキャリアの洗浄回数を減らすことができる等のキャリアの管理コストの低減に寄与する真空処理装置を提供する。
【解決手段】真空処理装置は、ロードロックチャンバLLとプロセスチャンバPCの間で移送されるキャリア7と、プロセスチャンバPC内に移送されたキャリア7から基板7を受け取るフック19を備えており、基板5への真空処理はキャリア7がロードロックチャンバLLに退避した後に行われる。
(もっと読む)
制御装置、基板処理方法、基板処理システム、基板処理システムの運用方法、ロードポート制御装置及びそれを備えた基板処理システム

【課題】ロードポートの個数を見かけ上増加させることにより、装置コストを抑制しつつも収納器の搬送効率を向上させることができる。
【解決手段】仮想ロードポート管理部は、物理ロードポートR−LP1,2に対して2個の仮想ロードポートV−LP1,2を割り当てる。さらに、仮想ロードポート管理部は、基板処理装置5と、キャリア搬送システム7と、ホストコンピュータ9とに対して、2個の仮想ロードポートV−LP1,2を2個の物理ロードポートとして扱わせる。したがって、現実の物理ロードポートの個数以上にロードポートが存在するようにFOUP3の搬送を行うことができ、見かけ上、ロードポートの個数を増加させることができる。その結果、装置コストを抑制しつつも、FOUP3の搬送効率を向上させることができる。
(もっと読む)
基板処理装置及び基板処理システム
【課題】メンテナンス性が高く、配置スペースの小さな基板処理装置等を提供する。
【解決手段】真空搬送室4は、被処理体である基板Sを搬送する基板搬送機構41を具備すると共に、平面形状が五角形以上の多角形となるように複数の側面に囲まれている。上部に蓋体52を有する複数の処理室5a〜5dは前記複数の側面のうち、外側にメンテナンス領域6を備えた側面を除いた側面に接続され、蓋体搬送機構7は前記処理室5a〜5dとメンテナンス領域6との間にて、前記蓋体52を搬送する。
(もっと読む)
被研磨物の搬送装置、被研磨物の搬送方法、ガラス基板の製造方法、ガラス基板、磁気記録媒体及び被研磨物のチャック治具
【課題】 研磨装置から速やかに、かつ確実に被研磨物を搬送可能な搬送装置を提供する。
【解決手段】搬送装置51は板状の本体53を有し、本体53には研磨装置21aに収納されたガラス基材1aをチャックするチャック治具55が設けられている。
図6に示すように、チャック治具55は、研磨装置21a上のガラス基材1a(被研磨物)の配置形状に対応した形状に配置されている。
チャック部57は柱状であり、端部61は軸方向に4つに分割されて拡径している。
また、チャック部57の外周には周方向に形成されたネジ65が設けられている。
一方、スリーブ59は円筒状の形状を有し、回転可能に設けられている。
スリーブ59をC1の向きに回転させると、チャック部57はスリーブ59内に引き込まれ、チャック部57の外周形状はスリーブ59の内周に拘束されて縮径する。
(もっと読む)
搬送システム及びズレ検出用治具
【課題】例えば半導体素子製造用の各種基板を収容する被搬送物を、ポートとの間で移載する搬送システムにおいて、移載用位置のズレ量を検出する。
【解決手段】搬送システム(100)は、被搬送物(9)が所定位置に載置されるポートとの間で、被搬送物を移載可能であると共に、被搬送物を保持可能である搬送本体部(20)と、搬送本体部が搭載されており、天井に敷設された軌道に沿って走行可能であると共に停止可能な走行部(19)と、走行部がポートに対応する停止位置に停止した際に、所定位置に対面するように被搬送物の代わりに搬送本体部に保持され、ポートを撮像し、ポートに係る距離画像を出力する距離画像手段(10)と、出力された距離画像に基づいて、走行部が停止位置に停止した際における所定位置に対する搬送本体部の移載用位置のズレ量を検出するズレ量検出手段(25)とを備える。
(もっと読む)
部品供給装置
【課題】ウェハリングをマガジン内の空いているスロットに確実に戻す。
【解決手段】ウェハリング1に保持されているウェハを収容するマガジン10を搭載するマガジン搭載台20と、該マガジン搭載台を上下方向に移動させるマガジン昇降機構22と、該昇降機構により所定高さに位置決めされたマガジン内のスロット12から、支持されているウェハリング1を取出す取出口42Aと、該取出口からマガジン内に把持具を挿入し、該把持具で対応する位置に支持されているウェハリング1を把持して引き出すウェハ取出機構を備えた部品供給装置において、上方又は下方に移動される前記マガジン10内の各スロット12に支持されているウェハリング1の有無を検知するセンサ56が所定高さ位置に設置され、前記マガジン搭載台20を上昇又は下降させた際の、センサによる検知信号と各スロット位置とを対応付けたマガジン内のウェハ有無情報を保存する。
(もっと読む)
搬送装置および処理装置
【課題】処理装置の構成の自由度を向上することができる搬送機構を提供する。
【解決手段】複数の処理室12,14に接続された処理物Wの搬送室13と、搬送室の内部に配置され、処理物を複数の処理室に搬送する搬送手段51と、搬送手段を処理室に対して出し入れする移動機構65,75と、を備えた搬送装置において、搬送手段と移動機構とを相互に接続および分断する断接部を備え、断接部が接続された状態で、移動機構が搬送手段を処理室に対して出し入れし、断接部が分断された状態で、搬送手段が処理物を複数の処理室に搬送するように構成されている。
(もっと読む)
搬送装置、基板処理装置および搬送方法
【課題】基板の処理室が有するプレート状部材を、変形および破損等が生じることを防止しつつ略鉛直方向に搬送する技術を提供することを目的とする。
【解決手段】処理室13の本体131を、本体移動機構16により退避用フレーム21へスライド移動させるとともに、搬送用治具233をホットプレート15の上方へ下方移動させ、しかる後に、連結部材235により搬送用治具233とホットプレート15とを連結させる。そしてウインチ234を動作させることによって、スリングSUを巻取り搬送用治具233とともにホットプレート15を吊揚げて、上方へ搬送する。さらに、本体131を処理用フレーム11内へと戻し、ウインチ234を動作させて巻取ったスリングSUを巻戻すことによって、搬送用治具233とともにホットプレート15を下方へ搬送する。
(もっと読む)
低減容量キャリア、搬送機、積載ポート、緩衝装置システム
部品を処理するための少なくとも1つの処理装置と、一次搬送システムと、二次搬送システムと、第1の搬送システムと第2の搬送システムとの間の1つ以上の接合部分と、を有する半導体部品処理システム。該一次および二次搬送システムはそれぞれ、該等速セクションに通じる待ち行列セクション内に1つ以上の実質的に等速のセクションを有する。  (もっと読む)
(もっと読む)
低圧処理機器のハウジング移動装置及びハウジング洗浄方法並びに基板処理ライン
【課題】ハウジングの洗浄を行う際に、低圧処理機器の運転を停止せず、基板処理の高生産歩留まりを実現できる低圧処理機器のハウジング移動装置等の提供を目的とする。
【解決手段】この課題を達成するため、ベースをハウジングで覆い内部に基板を収容して低圧処理するための低圧処理機器のハウジングを移動させるための装置であって、第1エアーアクチュエータ、第2エアーアクチュエータ、前記第1エアーアクチュエータの一端側と第2エアーアクチュエータの一端側と間に設けた支持体、前記第1エアーアクチュエータの他端側に設ける少なくとも1つの第1滑動部材、前記第2エアーアクチュエータの他端側に設ける少なくとも1つの第2滑動部材、前記支持体に設け前記ハウジングに接続可能な少なくとも1つの第1接続部材を含む低圧処理機器のハウジング移動装置等を採用する。
(もっと読む)
不連続コンベヤーシステム
【課題】本発明は、加工施設全体を通して、より具体的には加工施設のツールベイを通して、容器を輸送する容器を輸送する輸送システムを提供する。
【解決手段】本発明の輸送システムは、一般的に、容器をベイ間コンベヤーから第2のツールベイに向けて輸送するための第1の容器輸送システムと、容器を第1のツールベイから遠くへ移動させるための第2の容器輸送システムと、容器を第1及び第2の容器輸送システムとロードポートとの間で移動するためのツールローディングデバイスと、を含む。また、容器を第2の容器輸送システムとベイ間コンベヤーとの間で容器を輸送するための合流リターンコンベヤーを含むのがよい。
(もっと読む)
洗浄モジュール間で半導体基板の垂直移送の為の方法及び装置
一実施形態において、本発明は、第1軸運動に沿って位置決め可能なキャリッジと、上記キャリッジに結合され、第1軸運動と実質的に直交して向けられた第2軸運動に沿って上記キャリッジに関し位置決め可能な第1基板グリッパと、上記キャリッジに結合され、上記第2軸運動に対し実質的に平行に向けられた第3軸運動に沿って上記キャリッジに関し位置決め可能な第2基板グリッパと、を備える基板ハンドラであって、上記第2グリッパは、第1グリッパに関し独立して移動可能である、上記基板ハンドラを提供する。 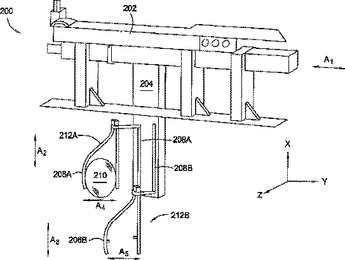 (もっと読む)
(もっと読む)
基板処理装置
【課題】 収納器収容・搬送ユニットにおいて収納器を効率的に搬送できる基板処理装置を提供する。
【解決手段】 搬送ロボット130aは、ロードポート10、第3載置部150、および棚配列140の間でFOUP80を搬送する。棚配列140を挟んで搬送ロボット130bと逆側に配設された搬送ロボット130bは、棚配列140および第2載置部160の間等でFOUP80を搬送する。第3載置部150では、それぞれマッピング処理、およびFOUP80に収納された基板の基板処理ユニット200への搬送が実行される。これにより、複数の搬送を略同時に実行できる。また、搬送ロボット130a、130bは、空間的に相互に干渉することなくFOUP80の搬送を実行できる。
(もっと読む)
板材収納方法および装置
【課題】 板材を1枚ずつケースに収納する装置において、板材の表面に傷や汚れが付くことを防止し、かつ短いサイクルタイムで収納可能とする。
【解決手段】 板材を起立状態にして取出位置まで搬送する搬送手段20と、取出位置の下方にケース1を保持しておくケース保持手段13、25とを設ける。その上で、板材10の下端面を下側から受ける受け部39を有し、取出位置に有る板材10を受け部39上に保持して該取出位置から取り出し、その後下降してケース1の溝内に該板材10を送り込むガラス挿入ハンド22等から板材移載手段を構成する。そして少なくとも板材10が取出位置からケース1の溝内に入り込むまでの間、この板材10の一表面および他表面に気体を吹き付ける板材保持手段23により、該板材10を非接触で起立状態に保つ。
(もっと読む)
基板洗浄装置及び洗浄方法、並びに半導体装置の製造方法
【課題】洗浄工程における工程待ち時間を少なくし、稼働効率を向上させる。
【解決手段】洗浄液14を貯留する洗浄槽13と基板洗浄用カセット24とを有し、基板洗浄用カセット24に収容されている基板100を基板洗浄用カセット24と共に洗浄槽13に浸漬して洗浄処理を行うものにおいて、基板洗浄用カセット24が基板100を1枚のみ収容可能であると共に、基板洗浄用カセット24は洗浄処理を行う前の処理工程で処理される1枚毎の上記基板に同期して洗浄槽13に浸漬される。
(もっと読む)
1 - 15 / 15
[ Back to top ]