
Fターム[5F031GA35]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | 移送装置に付加的機構を一体化したもの (669)
Fターム[5F031GA35]の下位に属するFターム
センサ (234)
加熱,冷却機能 (90)
型当てによる搬送物の位置決め機構 (117)
Fターム[5F031GA35]に分類される特許
221 - 228 / 228
非接触熱プラットフォーム
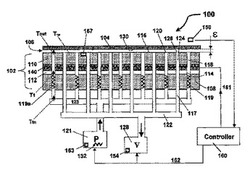
物体を熱処理する少なくとも1つの装置を含む熱処理システムであって、該装置は、1つのプラットフォーム、または互いに反対側に位置した2つのプラットフォームからなり、ここで少なくとも1つのプラットフォームは物体を加熱または冷却する少なくとも1つの熱的手段を有し、少なくとも1つのプラットフォームは、非接触で物体を支持する流体機械的手段を有している、熱処理システムである。前記プラットフォームは、少なくとも1つの、複数からなる基本セルからなる作動面を有し、この基本セルは、少なくとも1つの、複数からなる圧力吐出口と、少なくとも1つの、複数からなる流体排出流路を有するものである。各基本セルの圧力吐出口の少なくとも1つは、流量絞り機構を介して高圧流体源に流体的に接続され、この圧力吐出口は、前記物体とプラットフォームの作動面の間の流体クッションの形成維持のために加圧流体を供給するものである。流量絞り機構は、特性的には、流体的な戻しばね的な挙動を示すものである。各流体排出路は流入口と流出口を有し、各基本セルに対する質量流量の平衡をとるものである。 (もっと読む)
汚染物質削減基板移送およびサポートシステム

リフトアセンブリは基板を基板サポートから持ち上げ、かつ該基板を移送することができる。該リフトアセンブリは、該基板サポートの周辺に嵌合するようにサイズ設定されたフープと、該フープ上に搭載された1対のアーチ状フィンとを有しており、各アーチ状フィンは半径方向内側に延びる出っ張りを有する1対の対向端を備えており、各出っ張りは基板を持ち上げるための隆起した突起を有しており、該基板は実質的に該隆起した突起のみに接触して、該1対のフィンが該基板サポートから該基板を持ち上げるのに使用される場合に、該出っ張りとの接触を最小化することができる。該リフトアセンブリおよび他のプロセスチャンバコンポーネントは、(i)炭素および水素と(ii)シリコンおよび酸素の相互リンクネットワークを有するダイアモンド状コーティングを有することができる。該ダイアモンド状コーティングは、約0.3未満の摩擦係数と、少なくとも約8GPaの硬度と、約5×1012原子/cm2未満の金属の金属濃度レベルとを有する接触表面を有する。該接触表面は、直接的または間接的に基板に接触する場合に、基板の汚染を削減する。 (もっと読む)
基板加工方法、基板加工装置および基板搬送方法、基板搬送機構
【課題】 基板の反転を含む基板搬送における基板の損傷を防止し、これらの基板搬送機構を有する基板加工装置の小型化によって設置面積を減少させることができる基板加工方法および基板加工装置が提供される。
【解決手段】 マザー基板を単位基板に割断する基板加工装置は、マザー基板にスクライブラインを形成するスクライブ部3と、形成されたスクライブラインに沿ってマザー基板をブレークするブレーク部4と、少なくとも前記各部の間でマザー基板または単位基板を搬送する基板搬送部2とを具備し、基板搬送部2が、基板をそれぞれの基板の主面で吸着して保持する吸着面を備えた複数の回転台座51,73を有し、回転台座51,73のそれぞれは、回転軸52,72を有し、基板を吸着保持した状態で少なくとも基板の両主面が上下方向に反転するよう各基板をそれぞれの回転軸52,72周りにほぼ同時に回動させる基板吸着回動手段を有する。
(もっと読む)
ワークハンドリング装置
本発明のフークハンドリング装置は、ワークを載せるトレイを担持すると共に所定方向に往復動自在な可動テーブル(21)、ワークに対して所定の処理を施す処理部(30)を略中央に挟むようにしてトレイと処理部との間で往復動自在に配置され,かつ,ワークを搬送するべく水平方向及び鉛直方向に駆動される関節型アーム(410)及びその先端に設けら
れた複数の吸着ヘッド(420)をそれぞれ有する一対のハンドラ(40,40’)、一対のハンドラ及び可動テーブルを駆動制御する制御ユニット(70)を備え、制御ユニットは、トレイから処理部への未処理ワークの搬入動作及び処理部からトレイへの処理済みワークの搬出動作の両動作を,一対のハンドラにそれぞれ行わせるように駆動制御する。これにより、装置が完全に停止するのを防止できる。 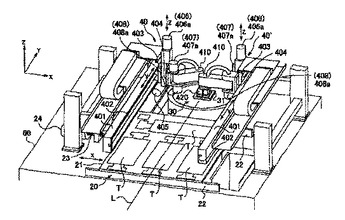 (もっと読む)
(もっと読む)
基板搬送装置、露光装置、並びにデバイス製造方法
基板搬送装置は、投影光学系と液体を介した露光処理を行う露光処理部に対して、基板を搬入する第1搬送機構と、基板を露光処理部から搬出する第2搬送機構と、第1搬送機構と該第1搬送機構が搬送する基板との少なくとも一方に対し、第2搬送機構と第2搬送機構が搬送する基板との少なくとも一方からの液体の飛散を抑制する飛散抑制機構とを備える。 (もっと読む)
基板搬送装置及び基板搬送方法、露光装置及び露光方法、デバイス製造方法
投影光学系と液体とを介したパターンの像によって露光された基板を搬送する基板搬送装置は、前記基板を支持する基板支持部材と、前記基板支持部材と、前記基板の裏面のうち少なくとも一部の領域との少なくとも一方に付着した前記液体を除去する液体除去機構とを備える。 (もっと読む)
半導体ウェーハを取り扱うエンドエフェクタ
半導体ウェーハを取り扱ういろいろなエンドエフェクタの設計が開示されている。例えば、比較的低温でウェーハを取り扱うエンドエフェクタが、比較的高温でウェーハを取り扱うエンドエフェクタとともに開示されている。いずれのエンドエフェクタも、ウェーハの縁部で該ウェーハに単に接触するように構成されている、独自に設計された支持部材を含んでいる。エンドエフェクタは、また、ウェーじゃ検出システムを含み得る。比較的低温でウェーハを取り扱うエンドエフェクタは、また、ウェーハを位置決めするばかりでなく、エンドエフェクタに取り付けられているロボット・アームにより引き起こされるエンドエフェクタの加速または減速中、エンドエフェクタ上のウェーハを保持するのに使用される押し装置を含み得る。設計されているように、エンドエフェクタは、非常に薄い外形を有し、簡単に操縦しやすいエンドエフェクタを作り得る。
 (もっと読む)
(もっと読む)
ワーク搬送用ロボット
【課題】アームの熱膨脹収縮により生じるハンド部材の偏位量を許容範囲内に収めることができるアーム回動形のワーク搬送用ロボットを提供する。
【解決手段】固定プーリ8,27と、一端が固定プーリ8,27に対して回動自在に支持されたアーム13,26と、アーム13,26の他端に回転自在に支持された回転プーリ15,29と、固定プーリと回転プーリとの間に張設されたベルト17,30とを備えたアーム機構を多段に設けて、最終段のアーム機構の回転プーリ29にハンド部材40を取り付けたワーク搬送用ロボットにおいて、アーム13,26の熱膨脹収縮によりハンド部材40に生じる偏位を許容範囲に収めるように、テンションローラ22,35からベルト17,30に与える張力を調整するようにした。
(もっと読む)
221 - 228 / 228
[ Back to top ]