
Fターム[5F031GA35]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | 移送装置に付加的機構を一体化したもの (669)
Fターム[5F031GA35]の下位に属するFターム
センサ (234)
加熱,冷却機能 (90)
型当てによる搬送物の位置決め機構 (117)
Fターム[5F031GA35]に分類される特許
61 - 80 / 228
搬送装置、塗布システム、及び検査システム
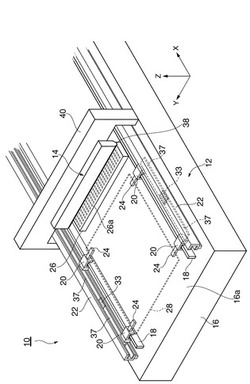
【課題】搬送に必要な推力の低減を図り、且つ被搬送物のたわみを抑制することが可能な搬送装置、これを備える塗布システム及び検査システムを提供する。
【解決手段】搬送装置12は、被搬送物28の搬送方向Xに延びる主面16aを有するベース16と、搬送方向Xに延びるガイド部材18と、ガイド部材18にガイドされて搬送方向Xに移動可能な移動部材20と、移動部材20に固定され主面16aから間隙を於いて被搬送物28を保持する保持部材24と、ベース16上の搬送方向Xにおける一部領域において、搬送方向Xに搬送される被搬送物28に対し気体の吐出及び吸引を行うための気体吐出吸引機構26と、を備える。
(もっと読む)
搬送システム

【課題】絶縁性のワークを搬送する際の帯電を抑制することが可能な搬送システムおよびコンベア装置を提供する。
【解決手段】搬送システム100は、ガラス基板Wをトレイ1に載置して搬送する搬送システムであって、ローラ25と、トレイ1とを備えている。ローラ25は、搬送方向に並んで複数配置されている。トレイ1は、絶縁性のガラス基板Wを載置する。そして、トレイ1とローラ25とにおいて、少なくとも互いの接触部(外側フランジ11およびローラ25)が導電性を有しており、接触部は接地されている。
(もっと読む)
分離装置及び基板の検査装置
【課題】支持体に積層された基板の枚数が少なくなっても確実に基板を1枚ずつ搬出することができる分離装置及びこの分離装置を備え、基板の検査を容易に行うことが可能な基板の検査装置を提供する。
【解決手段】複数の基板Wが積層状態で支持された支持体20から、基板Wを1枚ずつ分離して搬出する分離装置10であって、支持体20に対して基板Wの積層方向に相対移動可能とされるとともに、基板Wの表面に吸着して基板Wを保持する吸着ヘッド30と、積層された基板Wの側面に向けてエアを噴出して積層された基板Wの一部を浮上させて分離するエア分離機構40と、支持体20に積層された基板Wの数量が一定量以下となったことを検知する数量検知部27と、数量検知部27の検知結果に応じてエア分離機構40からのエア噴射状態を調整するエア分離機構制御部13と、を備えていることを特徴とする。
(もっと読む)
真空処理装置及び真空処理方法並びに記憶媒体
【課題】装置の占有面積の増大を抑えつつ、基板搬送手段に対する処理、基板の待機或いは基板に対する処理を行なう付属モジュールを追加すること。
【解決手段】真空搬送室3の底部30に凹部41を形成し、ここに第2の搬送アーム32の洗浄処理を行う付属モジュール(洗浄モジュール4)を、前記第2の搬送アーム32によるウエハWの搬送を阻害しないように前記凹部41に収納する位置と、前記真空搬送室3内において前記第2の搬送アーム32の前記保持領域を洗浄する位置との間で昇降させる。前記洗浄モジュール4は使用しないときには前記凹部41に収納し、使用するときには真空搬送室3内に突出するようにしているので、装置の占有面積の増大を抑えつつ、前記付属モジュールを追加することができる。
(もっと読む)
平板状保持具の保持装置
【課題】ウェーハと一体で操作される保持具を使用する際、簡単な操作にて保持具を保持することができる保持装置を提供する。
【解決手段】保持装置であるチャック1上面にウェーハ4を載せた平板状保持具3を設置した場合、平板状保持具3の端部近傍に設けられた吸引用配管5の吸入口5aに当接する部分にベローズ6を備え、該ベローズ6はチャック1の上面の端部近傍に設けられた穴1aの底面にその底面6aが設置されており、穴1aの底面からはさらに真空ポンプ(不図示)に連結される配管7aが設けられ、チャック1の上面の中央には、多孔質アルミナ製の円盤1bが、通常のアルミナ製のチャック本体1cにはめこまれ、円盤1bの底部はチャック1の内部に設けられた中空部1dに露出し、中空部1dの底部からは円盤1bを介して平板状保持具3を真空吸着するための配管7bが真空ポンプに連結されている。
(もっと読む)
オートハンドラ
【課題】搬送能力を向上させることができるオートハンドラを提供する。
【解決手段】本発明のオートハンドラは、ソークコーナーC1とテストポートPとの間で往復移動可能なシャトル24と、テストポートPとコーナーC2の間で往復移動可能なシャトル25とを有する搬送装置14を備えており、シャトル24に搬送される搬送ボートB上の全ての半導体デバイスのコンタクトヘッド18による移送が完了する前に、シャトル24,25を共に移動させて、テストポートPでシャトル24に搬送される搬送ボートBをシャトル25に受け渡す処理を行う。
(もっと読む)
基板搬送装置
【課題】非導電性潤滑剤が与えられた軸受を用いた移動手段により基板保持部を移動させて基板搬送を行う基板搬送装置において基板保持部で保持した基板から静電気を確実に除去する。
【解決手段】接触子7の上方端部が連結コラム55bの下端面に取り付けられる一方、その下方端部は屈折部71となっており、支持ベース52の内底面に配置された導電プレート522に当接して屈折部71を導電プレート522に押し付ける方向に弾性力が作用している。このため、ハンド51bが移動する際に、屈折部71は電気的にグランド電位に接続されている導電プレート522の上面と機械的に常時接触しながら摺動し、ハンド51b−ホルダ53b−連結コラム55b−接触子7−導電プレート522という除電経路が常時形成されている。
(もっと読む)
搬送装置および機構体
【課題】 ガスカーテンを通過して被搬送体を搬送しても、ガスカーテンを超えたガスの移動が発生しにくい搬送装置および機構体を提供する。
【解決手段】 被搬送体14を載置、牽引、または押して移動方向への駆動力を与える機構体15が、ガスカーテンを通過して被搬送体を搬送する搬送装置11において、該ガスカーテンが該被搬送体の搬送方向16に対して所定の噴射速度でガスを噴射して形成され、該ガスの噴射方向19と該搬送方向16とに垂直な方向の該機構体15の厚みが、該噴射方向19の上流側または下流側の少なくとも一方の端部に向かって、徐々に薄くなることを特徴とする。そうすることによって、搬送装置11は、機構体がガスカーテンを通過して被搬送体14を搬送しても、ガスの乱れが発生しにくいので、ガスカーテンによる閉塞効果が高く、ガスカーテンを超えてガスが移動しにくい。
(もっと読む)
非接触型搬送保持具および非接触型搬送保持装置
【課題】非接触型搬送保持具および非接触型搬送保持装置の提供。
【解決手段】内側に一端が閉じ他端が開放された円筒状空間部12を有し円筒部13と底部14を有するボデー11と、ボデー11の円筒部13に形成され円筒状空間部12の側面を構成する円筒状のボデー内周面15と、ボデーの底部14に形成され円筒状空間部12の底面を構成する平坦なボデー底面16と、ボデーの円筒状空間部12の開放側端部に形成された平坦なボデー開放側端面17と、ボデー内周面15のボデー底面側端部に形成され円筒状空間部12にガスを接線成分をもたせて導入する1つ以上のガス導入口18と、を有する非接触型搬送保持具10。円筒状空間部12にガスを供給すると円筒状空間部12内に負圧が生じて、被搬送物を吸引保持する。被搬送物とボデー開放側端面17との間にはガスの流出隙間があるので、被搬送物は非接触保持される。
(もっと読む)
パーティクル排出ユニット及びこれを含む基板移送装置
【課題】パーティクルを排出するユニットとこれを含む基板移送装置を提供する。
【解決手段】隔壁はハウジングの内部に垂直方向に配置され、ハウジングの内部空間を第1空間及び第2空間に区分する。圧力発生部材は、第1空間を上部空間及び下部空間に区分し、上部空間及び下部空間内で正圧及び負圧が交互に発生するように第1空間内で垂直方向に移動する。基板支持部材は、第2空間内で移動可能に配置され、基板を支持して移送する。複数のゲートはハウジングの側壁及び隔壁に具備され、第2空間から第1空間を経て外部空間にパーティクルを排出するために正圧及び負圧によって開閉される。
(もっと読む)
一体化されたウェハ受渡し機構
一体化された高速ロボット機構が、搬送機器を改良し、対象物移動を位置合わせ又は識別等の別の機能と一体化するために開示されている。開示された一体化されたロボットアセンブリは、通常、対象物をチャンバに出し入れするためのエンドエフェクタと、中心合わせ及びシータ位置合わせ能力を提供するためにロボットボディに組み込まれた回転チャックと、搬送中に対象物を識別するための選択的な識別サブシステムとを有する。本発明は、複数の一体化されたロボットアセンブリと、受渡しシステムとを有する受渡しロボットシステムも開示しており、この場合、受渡しロボットシステムは、FOUP又はFOSB、フロントエンドモジュール(FEM)、又はソータ等の複数の結合されたチャンバのために働く。移動するロボットへのこれらの組み込まれた能力の使用により、1つの対象物受渡し操作が、毎時500パーツを超えることができる。  (もっと読む)
(もっと読む)
基板処理装置、基板処理方法および半導体装置の製造方法
【課題】小バッチに対応し、コストを低減する。
【解決手段】バッチ式CVD装置1の筐体2の正面下部にポッド26のキャップを開閉するポッドオープナ21を設置し、ポッドオープナ21のポッド載置台22の左右両脇に第一ポッドステージ24、第二ポッドステージ25を設置する。ポッドオープナ21,両ポッドステージ24,25の上方には把手28を上下の押さえ53と50とで把持した状態で、ポッド26をポッドオープナ21とポッドステージ24,25との間で搬送するポッド搬送装置30を設置する。ポッドはポッドステージとポッドオープナとの間をポッド搬送装置によって直接的に搬送されるため、ポッドを一時的に保管する保管棚を省略でき、小バッチ式CVD装置のイニシャルコストやランニングコストを低減できる。
(もっと読む)
板状体検査設備
【課題】常に一方の面を支持して搬送しながらも、その一方の面(被支持面)の検査作業を能率的に行える板状体検査設備を提供する。
【解決手段】搬送装置10による板状体Gaの搬送経路1中で、目視検査部Bに対向する部分に、昇降動手段41と反転動手段51を設けた。昇降動手段は、搬送面1Aの下方に位置する昇降体42と、昇降装置46と、搬送面に対して出退動自在として昇降体に設けた板状体持ち上げ体47とにより構成した。反転動手段は、幅方向1Wに移動自在な移動体52と、移動体の下部に連動した横移動装置55と、移動体の上部に、横軸心63Aの周りに回動自在に設けた回動体61と、回動体の回動装置65と、回動体が水平状姿勢のときに下面61A側に位置する板状体保持装置71とにより構成した。回動装置は、板状体保持装置が搬送経路の搬送面に対向して位置する水平状姿勢と、板状体保持装置が搬送面に対して起立状に位置する傾斜状姿勢との間で回動体を回動すべく構成した。
(もっと読む)
基板搬送装置
【課題】同期の調整、複雑な制御が不要となり、低コストで基板搬送装置を実現できる。
【解決手段】処理対象基板を載置する基板載置台と、当該基板載置台を本体フレームに対してスライド可能に支持するスライド機構と、前記基板載置台に載置された前記処理対象基板を支持して昇降させる昇降機構と、前記スライド機構によってスライド可能に支持された前記基板載置台を設定位置に正確に移動させる移動機構とを備えた。前記昇降機構は、前記移動機構で前記基板載置台を一方にスライドさせると前記処理対象基板を上昇させ、前記基板載置台を他方にスライドさせると前記処理対象基板を降下させる連動機構を備えた。
(もっと読む)
塗布装置及び塗布方法
【課題】基板上に液状体を安定して塗布することが可能な塗布装置及び塗布方法を提供する。
【解決手段】基板の浮上高さを制御するためのエア噴出機構及び吸引機構と、エア噴出孔から噴出されるエアの噴出圧が一定になるように、当該噴出圧を制御するAPCとが設けられているので、基板の浮上量を一定に制御することができる。これにより、気体供給設備の気体供給量が不安定な場合であっても、基板の浮上量が変化することはなく、安定してレジストを基板上に塗布することができる。
(もっと読む)
搬送物浮上装置及びこれを用いたステージ装置
【課題】本発明は、加工容易でありながら、高い保持剛性を実現できる搬送物浮上装置及びこれを用いたステージ装置を提供することを目的とする。
【解決手段】表面11に吹出孔50と吸引孔60とを有し、内部12に前記吹出孔に連通する吹出流路70と前記吸引孔に連通する吸引流路80とを有する搬送台10と、
該搬送台の外部に設けられ、前記吹出流路にエアを供給するエア供給路20とを有する搬送物浮上装置200、200a、200bであって、
前記エア供給路は、前記エアに圧力損失を生じさせる圧力損失発生手段21、21a、21bを含むことを特徴とする。
(もっと読む)
ウエハ搬送ロボット
【課題】ウエハの供給能力の高いウエハ搬送ロボットを提供する。
【解決手段】ウエハ搬送ロボット1は、移動可能な本体5と、本体5に設けられ、末端にウエハ20を保持できるハンド19を備えるロボットアーム7と、本体5に設けられ、ウエハ20を保持可能な吸着パッド14を備えるアライナ6とを有し、アライナ6は、吸着パッド14を本体5に対して垂直方向および水平方向に移動可能、且つ、水平軸周りに回転可能であり、吸着パッド14の昇降によってハンド19との間でウエハ20を受け渡し可能である。
(もっと読む)
平面状の基板用の非接触型搬送装置
【課題】周囲の雰囲気及び温度にかかわらず、基板を確実に加速、搬送及び再び制動することが可能な平面状の基板用の非接触型搬送装置を提供すること。
【解決手段】平面状の基板1を搬送路3に沿って搬送する非接触型搬送装置において、搬送路3の両側に所定の間隔をもって複数のベルヌーイチャック2a,2bを配置し、搬送される基板1が搬送路3の両側おけるベルヌーイチャック2a,2bをそれぞれ部分的に覆うよう構成し、基板1の搬送のために、搬送路3の両側におけるベルヌーイチャック2a,2bを、それぞれ左回り又は右回りに回転する気体流5,6を生成するよう構成した。  (もっと読む)
(もっと読む)
産業用ロボット
【課題】簡易な構成で、搬送対象物の把持、解放を行うことができる産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物2を搭載するハンド3と、ハンド3を保持する多関節アーム部とを備えている。ハンド3は、搬送対象物2を把持するための把持部28と、搬送対象物2から退避させる方向へ把持部28を付勢する付勢部材29とを備えている。把持部28は、搬送対象物2に当接する把持部材34と、多関節アーム部の伸縮動作に伴う慣性力で、把持部材34が搬送対象物2に当接する方向へ把持部材34を移動させる重量部材35とを備えている。
(もっと読む)
基板保持装置および基板処理装置
【課題】従来の基板処理装置の基板処理性能を維持しながら、製造コストを抑え、さらに基板の処理時間時間を短縮する。
【解決手段】基板保持装置3に可動部材6を設ける。可動部材6は、プランジャー60を備え、その上端部には、ガスケット61およびOリング62が固設されている。可動部材6の上側は、基板保持装置3の基板載置ステージ30の下側から、基板載置ステージ30に設けられた孔37に向けて挿管される。このような構成とすれば、従来のような長い配管が不要となり、製造コストを抑えられる。また、基板90の下面と孔37とガスケット61およびOリング62の上面とで、閉空間661,662が形成される。この状態で、可動部材6のプランジャー60を上下駆動(進退駆動)すれば、閉空間661,662の容積を変更でき、基板90を迅速に吸着あるいは剥離でき、基板の処理時間を短縮できる。
(もっと読む)
61 - 80 / 228
[ Back to top ]