
Fターム[5F031GA35]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | 移送装置に付加的機構を一体化したもの (669)
Fターム[5F031GA35]の下位に属するFターム
センサ (234)
加熱,冷却機能 (90)
型当てによる搬送物の位置決め機構 (117)
Fターム[5F031GA35]に分類される特許
201 - 220 / 228
基板処理装置、基板載置台交換方法、及びプログラム

【課題】基板処理装置の稼働率を向上させることができる基板処理装置を提供する。
【解決手段】基板処理装置は、稼働時間カウント値Tが交換稼働時間Teに達している場合、第1搬送アームのピックを真空状態のP/C内の空のピック載置台上に載置する。次いで、第1コイル電源をON状態にして第1搬送アームのコイルに電圧を印加して、第1搬送アームのコイルに磁力を発生させ、第1搬送アームの第3腕部においてこの磁力により磁性体が引っ張られて移動し、ピックが第1搬送アームから取り外し可能な状態になる。次いで、第1搬送アームを動かして第3腕部からピックを取り外し、第3腕部に対してこの新しいピックの位置決めを行い、コイル電源をOFF状態にしてこの新しいピックを第1搬送アームに固定する。
(もっと読む)
傾き補正装置及びそれを備えた搬送ロボット

【課題】搬送ロボットが半導体ウエハ等の基板を保持する際に生じるアームの撓みを、小さな駆動源による大きな動力で、高精度に傾きを修正できる基板の傾き補正装置を提供する。
【解決手段】減速機を備える駆動源を作動してスライド部材12を直線運動させることにより、このスライド部材12とエンドエフェクタ8及びエンドエフェクタ基台7を連結する支持部材14,15によりエンドエフェクタ8の一端を昇降させることで揺動させる基板の傾きを補正する。
(もっと読む)
ハンドリング治具
【課題】被ハンドリング体を容易かつ精度よく移動させることができるハンドリング治具を提供する。
【解決手段】ハンドリング治具1は、グリップ2と、このグリップ2に回動自在に取り付けられたレバー3と、グリップ2に取り付けられた固定アーム4と、レバー3に取り付けられた回動アーム5とからなる、フォトマスク基板10を保持するハンドリング治具1であって、フォトマスク基板10を保持した状態のハンドリング治具1の重量バランスを、グリップ2の被ハンドリング体側の端部を支点とする平衡状態とした構成としてある。
(もっと読む)
基板搬送装置
【課題】 被処理基板をアーム部材に載置し、基板処理部に対して基板の搬入出を行う基板搬送装置において、大型の被処理基板であっても、アーム部材上に設けた吸着パッドにより確実に基板面を吸着し、基板をがたつかせることなく確実に保持することのできる基板搬送装置を提供する。
【解決手段】 複数の吸着パッド56を有するアーム部材51を備え、前記吸着パッド56上に被処理基板Gを載置し、基板処理部に対して被処理基板Gの搬入出を行う基板搬送装置41において、前記吸着パッド56を振動させる振動手段と、前記振動手段を駆動する振動駆動手段57と、前記振動駆動手段57の動作制御を行う制御手段58とを備え、前記制御手段58は、前記吸着パッド56上に被処理基板Gを載置する際、前記振動駆動手段57により前記振動手段を作動させ、吸着パッド56を振動させる。
(もっと読む)
転写用マスクのIP測定装置および静電吸着方式のチャックへの静電吸着用電圧の供給方法
【課題】IP測定作業を自動で行うことができる転写マスク用IP測定装置を提供する。
【解決手段】転写用マスクとこれを保持するチャックとの2つを一体とした、あるは、前記2つとこれらを載置するためのアダプタとの3つを一体とした、一体部材80の形態を維持しながら、全ての作業動作を行うもので、静電吸着用として、前記チャックへ所定の電圧を供給する電圧供給用の電源60を設け、電源からチャックに電圧を供給する回路を、複数61、62、63配し、各回路は、それぞれ、チャックが移動する全経路の一部で、チャックへの静電吸着用の電圧の供給を分担し、あわせて、全経路に渡り、チャックの静電吸着用の電圧を供給し続けるものである。
(もっと読む)
非接触吸着装置
【課題】 リング状をなすワークを確実に吸着保持できるだけでなく、吸着不良の防止や厚さの薄いワークの変形、破損防止も同時にできる非接触吸着装置を得る。
【解決手段】 チャック本体2の吸着側平面2bに多孔質体8を設け、その周囲に負圧室22への導入口21を周囲全体にわたり設けた。そして、多孔質体8のエア噴出面8bから圧縮エアを噴出させて半導体チップの被吸着面に浮上力を作用させる。それと同時に、導入口21周辺のエアを吸引して、その吸引力をチップの外周部側に作用させる。吸引力をチップの外周部側で作用させれば、その外周部側が被吸引部分となり、チップを確実に吸着保持できる。また、導入口21がエア噴出面8bの周囲全体にわたって配置されているため、吸引力が一箇所に集中せず、吸着不良の防止や厚さの薄いチップの変形、破損防止も図れる。
(もっと読む)
試験待機電子装置用無吸着ヘッド式ピックアップ装置
【課題】 試験待機電子装置用無吸着ヘッド式ピックアップ装置の提供。
【解決手段】 複数の開口を具えた気密カバーが形成する無吸着ヘッド式ピックアップ装置により表面に複数の端子(pads)を具えた試験待機電子装置を吸着し、各開口は各端子を収容するのに用いられ、並びに減圧により発生する吸力により試験待機電子装置を吸着する。更に弾性装置で試験待機電子装置の各端子と対応する試験端子(pogo pin)にある距離を保持させ、弾性装置の圧縮により各端子と対応する試験端子が接触させられ、試験が行なわれる。試験完了後に弾性装置の圧縮が解除されることで、試験待機電子装置の端子と試験端子が分離し、更に試験待機電子装置がトレイエリアに移動され、真空が破壊されて釈放される。
(もっと読む)
フォトマスクのクリーニング及び検査の可能性を設けるフォトマスク用操作装置
電子部品の製造において用いられるレチクル用検出/クリーニング装置であって、検出/クリーニング装置がクリーニングユニットを有し、その中にクリーニングチャンバーが構成されている。圧縮液体クリーニング媒体の導入用の少なくとも1つのガス供給がクリーニングチャンバーへ通じる。ガスをクリーニングチャンバーから放出する少なくとも1つの吸引手段がクリーニングチャンバーから通じる。クリーニングチャンバーはレチクルを導入し且つ取り除く少なくとも1つの第1開口部を有する。半導体製造で用いられる品物の汚染を検出する検出ユニットが設けられる。検出ユニットは検出手段を有し、その中へレチクルが検出ユニットの1つの送り側から導入され得る。クリーニングチャンバーの第1開口部と送り側は互いに反対側にある。送り装置はクリーニングユニットと検出ユニットとの間のレチクルを交換するために設けられる。  (もっと読む)
(もっと読む)
基板キャリアを支持する場所を変更するための方法および装置
【課題】エンドエフェクターによって基板キャリアを支持する場所を変更する方法及び装置を提供する。
【解決手段】エンドエフェクターを使用して基板キャリアの底部によって基板キャリアを支持するステップ605と、基板キャリアをエンドエフェクターから中間支持ロケーションに移送するステップ607であって、中間支持ロケーションは、基板キャリアの底部によって基板キャリアを支持するステップと、エンドエフェクターを基板キャリアのオーバーヘッド移送フランジの近くに再配置するステップ609と、エンドエフェクターを使用して基板キャリアのオーバーヘッド移送フランジによって基板キャリアを支持するステップ611と、基板キャリアを中間支持ロケーションから移送するステップ613と、を含む。
(もっと読む)
スタッカークレーン
【課題】走行台車の発進、走行及び停止時のマストの振動を抑制することにより、スタッカークレーンの搬送サイクルタイムを短縮し、安全に搬送効率を向上させること。
【解決手段】走行台車2の上にメインマスト3とサブマスト4とを所定間隔をおいて立設するとともに、メインマスト3とサブマスト4の間に、昇降台6を昇降可能に配設し、この昇降台6に移載機7を搭載したスタッカークレーンのメインマスト3とサブマスト4にガイド9を配設し、このガイド9に昇降台6のガイド受部61を係合させるとともに、ガイド受け部61と昇降台本体の間にダンパー8を介設する。
(もっと読む)
搬送装置、及び露光装置
【課題】 装置の小型化、搬送速度の高速化を実現する。
【解決手段】 第1ハンド部124及び第2ハンド部134の一方のハンド部が所定の受渡位置P8にあるときに、他方のハンド部が前記一方のハンド部に干渉することなく受渡位置P8に対して進行又は待避可能なように、第1ハンド部124の一対の第1指部125a,125bを所定の中心軸A1に対して左右非対称に構成するとともに、第2ハンド部134の一対の第2指部135a,135bを所定の中心軸A2に対して左右非対称な形状とした。
(もっと読む)
搬送装置、露光装置、及び搬送方法
【課題】物体の位置ずれや落下等の不具合の発生を抑制しつつ処理速度を向上する搬送装置を提供する。
【解決手段】搬送アームによる物体の保持の有無を例えば吸着圧により検出し、保持無しと検出された場合における前記搬送アームが速度零から所定の移動速度Maxに到達するまでに要する時間t1が、保持有りと検出された場合における前記搬送アームが速度零から当該所定の移動速度Maxに到達するまでに要する時間t2よりも短くなるように、該搬送アームの移動を制御する。
(もっと読む)
クリーニング機能付き搬送部材および基板処理装置のクリーニング方法
【課題】 基板処理装置内に搬送して装置内の異物をクリーニング除去したのち、再利用のために、異物が付着したクリーニング層を容易に取り除くことができるクリーニング部材を提供することを課題とする。
【解決手段】 搬送部材1の少なくとも片面にクリーニング層2が設けられているクリーニング機能付き搬送部材において、搬送部材1上に上記のクリーニング層2を剥離させるための剥離層3が少なくとも一層形成されていることを特徴とするクリーニング機能付き搬送部材、とくに、上記剥離層3が、エネルギーを受けて剥離機能を発現する樹脂層、中でも、エネルギーを受けて重合硬化する樹脂層や、エネルギーを受けて発泡する粒子を含んだ樹脂層からなる上記構成のクリーニング機能付き搬送部材。
(もっと読む)
基板処理装置
【課題】 スピンレス方式で被処理基板上に処理液を供給ないし塗布する基板処理装置において基板の大型化に無理なく効率的に対応すること。
【解決手段】このレジスト塗布ユニット(CT)82は、プロセスラインAの方向(X方向)に長く延びるステージ112を有し、このステージ112上で基板Gを噴出口120からの空気圧で浮上させて同方向(X方向)に平流しで搬送しながら、ステージ112上方に配置された定置型のレジストノズル114より基板G上にレジスト液を供給して、基板上面に一定の膜厚でレジスト塗布膜を形成する。ステージ112の両端部の搬入、搬出領域に属する各噴出口120については、空気の噴出流量を基板Gとの相対的な位置関係で個別的かつ自動的に切り換える噴出制御部(流量切換弁)をステージ112の内部に設けている。
(もっと読む)
半導体基板吸着ハンド及びその操作方法
【課題】 半導体基板が大型化し且つ薄くなって表面が反ってしまうような状態でも確実に吸着することができ、半導体基板を処理する吸着ステージへセットすることが容易であり、半導体基板の表面汚染を著しく少なくできる半導体基板吸着ハンド及びその操作方法を提供する。
【解決手段】 半導体基板吸着ハンドは、アーム1に支持され、半導体基板15を保持するチャック10と、チャック中央部に設けられ半導体基板を真空吸着する基板吸着部11と、チャック周辺部に設けられ半導体基板の周辺部を抑える複数のピン8とを備え、基板吸着部には、先端部の径が他の部分より小さい複数の突起が植設され、半導体基板を吸着する際には、先端部が半導体基板に接触するように構成されている。このハンドを用いて半導体基板を平面状に修正しながら吸着する。
(もっと読む)
駆動装置及びその駆動方法
【課題】 オープンループ制御により、精確な動作が可能な駆動装置及び駆動装置の制御方法を提供する。
【解決手段】 駆動制御部10から出力される制御信号に基づいて、ドライバ11から所定の駆動信号が出力されて駆動源15を動作させる。駆動制御部10による制御動作が終了すると、振動制御部12が駆動源を一定期間に正逆方向に交互に駆動させるような駆動制御信号を発生する。これにより駆動源15は微振動する。駆動源の微振動による駆動力方向の力が、摩擦力等の負荷により抑制され最後まで動作できずに残存している駆動力と合算されて、駆動方向の力が摩擦等の負荷よりも大きくなると、動作部は残存駆動力に応じた距離だけ移動する。これにより、駆動制御部10の制御信号に基づく動作が精確に実行される。
(もっと読む)
マスク搬送装置
【課題】マスク搬送時にマスクに働く慣性力や振動などを吸収する機構を提供する。
【解決手段】マスク交換時にハンド23を180度回転するが、そのときステッピングモータが自起動運動するためにマスクにはマスクの質量と加速度に応じた慣性力が加わる。この慣性力をマスク保持機構15の下にある平行ばね12L、12Rを用いて緩和することにより、マスクはマスク保持機構15上を滑ることなく位置を保つことができる。
(もっと読む)
基板搬送装置および露光装置
【課題】基板をステージ装置に吊り下げ保持する場合において、静電チャックから確実に基板を搬出できる基板搬送装置を提供する。
【解決手段】基板搬送装置は、ステージ11に配置され基板5を保持する吸着面を下向きに有するチャック4と、前記基板5を上側に載置する基板載置部2を備え、前記チャック4の下側で前記基板5の搬入または搬出を行う搬送アーム1と、前記基板載置部2を隔てて配置された複数の引掛爪3と、を有し、前記引掛爪3は、前記基板載置部2に形成され前記基板5よりも上側に突出する基部3aと前記基部3aから前記基板載置部2に向けて張り出した爪部3bとを備え、前記基板載置部2と前記チャック4とは前記搬出時において上下方向に離間して、前記吸着面に吸着された前記基板5を前記爪部3bに押圧させることを特徴とする。
(もっと読む)
基板搬送装置および露光装置
【課題】 本発明は、露光装置においてレチクル,ウエハ,マスク等の基板を搬送する基板搬送装置に関し、基板をステージ装置に吊り下げて保持する場合において、基板をチャックに確実にロードまたはアンロードすることを目的とする。
【解決手段】 ステージに配置され基板を吸着する吸着面を下向きに有するチャックと、前記チャックの下側から前記基板の搬入または搬出を行う搬送アームと、前記搬送アーム側に配置され前記基板の前記チャックへの吸着または離脱時に前記基板を前記吸着面に弾性的に押圧する付勢手段とを有することを特徴とする。また、前記チャックに配置され前記基板の前記チャックからの離脱時に前記基板を前記搬送アーム側に押し出す押出機構を有することを特徴とする。
(もっと読む)
重力補償装置
重力補償装置は、基本質量(10)によって回転軸線(13)から第1の距離を置いたところで平衡装置(12)に及ぼされた力を、回転軸線から第2の距離を置いたところで平衡装置に反力を及ぼす力発生装置、例えばばね(14)によって、部分的に又は全体的に補償する。第1の距離、第2の距離又はこれら両方は、所望の重力補償具合を提供するよう選択可能である。角度可変半径を有する1つ又は2つ以上の滑車を使用するのがよい。重力補償装置は、基本質量にそれほど質量を追加することはなく、設計が単純である。 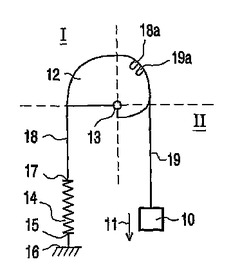 (もっと読む)
(もっと読む)
201 - 220 / 228
[ Back to top ]