
Fターム[5F031JA25]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出の目的 (2,253) | 容器内での位置ずれ(傾き、はみ出し等) (89)
Fターム[5F031JA25]に分類される特許
1 - 20 / 89
加工装置
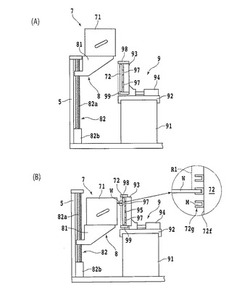
【課題】密閉式の蓋付きカセットを用いる形態の加工装置において、カセット蓋が取り外された際に、カセット本体から半導体ウェーハが飛び出したことを検出可能とする加工装置を提供する。
【解決手段】一側面に搬出入開口部71aを有するカセット本体71と搬出入開口部71aを開閉するカセット蓋72とからなり、カセット本体71中に半導体ウェーハWを収容したカセット7を載置するカセットテーブル81を備えたカセット載置機構8と、カセットテーブル81に載置されたカセット7から搬出された半導体ウェーハWを保持するチャックテーブル19と、チャックテーブル19に保持された半導体ウェーハWを加工する加工手段としての切削ユニット24と、を具備する加工装置とする。
(もっと読む)
搬送車

【課題】被搬送物に収納された平板状部材の収納状態を精度良く検出することができる搬送車を提供する。
【解決手段】搬送車1は、所定の方向に沿って走行可能に設けられた走行台車3と、走行台車3に対して上下方向の軸中心に回転可能に設けられたターンテーブル9と、ターンテーブル9に設置され、カセットWを載置すると共に、カセットWの移動を行う移載装置11と、カセットWにおけるガラス基板Gの収納状態を検出光Lにより検出すると共に、その光軸方向が走行台車3の走行方向に沿い且つターンテーブル9と伴に回転しない位置に設置されたマッピングセンサ13と、移載装置11によりカセットWを取り込み、ターンテーブル9を回転させてカセットWを回転させた後に、マッピングセンサ13がカセットWにおけるガラス基板Gの収納状態を検出するように制御するコントローラ15とを備える。
(もっと読む)
ウェーハマッピング装置およびウェーハマッピング方法
【課題】半導体基板が格納容器から飛び出しているか否かを高速かつ確実に検出することができるウェーハマッピング装置を提供すること。
【解決手段】実施形態のウェーハマッピング装置では、照明光学系が、ウェーハ側面に対して垂直に交わる線状スリット光を、各ウェーハの複数箇所に照射する。第1および第2の撮像部は、前記線状スリット光が照射されているウェーハの側面をそれぞれ第1および第2の撮像画像として撮像する。格納状態検出部は、前記第1および第2の撮像画像が撮像されている場合には、三角測量方法で前記ウェーハの前記格納容器からの飛び出し量を算出し、前記第1および第2の撮像画像の何れか一方のみが撮像されている場合には、前記線状スリット光の反射光が画像面上で結像する結像位置と、基準位置と、を比較することにより、前記ウェーハが前記格納容器から飛び出しているか否かを判定する。
(もっと読む)
ロボットシステム
【課題】ウエハを多段に収納するカセット内のウエハを安全に取り出すこと。
【解決手段】進入可否判定部が、移載対象となるウエハの直下および直上のクリアランスに基づいてハンドが進入可能であるか否かを判定する。そして、進入可否判定部によって進入可能であると判定されたならば、位置補正部は、ハンドの最終的な進入位置を、マッピングされた収納位置に基づいて算出し、算出した進入位置に基づいてロボットを制御するようにロボットシステムを構成する。
(もっと読む)
基板保持装置、基板処理装置、基板処理方法、及び基板処理プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】基板の材質や表面の状態などの影響を受けることなく基板の保持状態の良否を正確に判断できるようにすること。
【解決手段】本発明では、基板(2)を保持するための基板保持手段(30)と、基板保持手段(30)で保持した基板(2)を押圧するための基板押圧手段(26)と、基板保持手段(30)で保持した基板(2)を検出するための基板検出手段(25)と、基板保持手段(30)、基板押圧手段(26)、及び基板検出手段(25)を制御するための制御手段(27)とを有し、制御手段(27)は、基板保持手段(30)で基板(2)を保持するとともに基板検出手段(25)で基板(2)を検出して初期値とし、その後、基板押圧手段(26)で基板(2)を押圧するとともに基板検出手段(25)で基板(2)を検出して比較値とし、初期値と比較値とを比較して基板保持手段(30)による基板(2)の保持状態の良否を判断することにした。
(もっと読む)
基板処理装置及び基板処理方法
【課題】リングボートでウエハの飛び出しとリング状プレートの飛び出しとを検出することができる基板処理装置及び基板処理方法を提供する。
【解決手段】基板12及び基板支持部70の基板支持体の既定位置からの飛び出しをそれぞれ検出する飛び出し検出手段は、第1の飛び出し検出センサ92と、第2の飛び出し検出センサ94と、第1の飛び出し検出センサ92及び第2の飛び出し検出センサ94を支持する飛び出し検出センサ支持部と、前記飛び出し検出センサ支持部を基板12又は基板支持部70の載置方向に移動する移動手段とを有し、第2の飛び出し検出センサ94は、第1の飛び出し検出センサ92よりも前記基板支持体から離れ、かつ、第1の飛び出し検出センサ92が設けられた位置における飛出し検出センサ支持部の移動方向の前面より前側の位置に設けられている。
(もっと読む)
カセットアダプタ、及びアダプタ本体ロック装置
【課題】300mmのウエハを収容する第1カセットに対応のロードポートを使用して、200mmのウエハを収容する第2カセットを設置してロック可能にするアダプタ本体ロック装置を提供する。
【解決手段】300mmのウエハを収容する第1カセットをキャリアベース5にロックするロック用エアシリンダ14を備えたロードポートPに、200mmのウエハを収容する第2カセットK2を設置してロック可能にするために、キャリアベース5に取付けられるカセットアダプタは、キャリアベース5にセットされるアダプタベースVと、アダプタベースVを介して回動可能に装着されるL字形のアダプタ本体Dとから成り、アダプタ本体Dを構成するアダプタプレートEの裏面に、ロック用エアシリンダ14のロッド13の先端のロック爪12に対して解除可能に係合されて、キャリアベース5にアダプタ本体Dを固定可能とする被ロック部材35を一体に設ける。
(もっと読む)
カセットアダプタ、及び着座センサ機構
【課題】直径300mmのウエハを収容する第1カセットに対応のキャリアベースにカセットアダプタを取付けて、直径200mmのウエハを収容する第2カセットの正しい位置への着座を検出する着座センサ機構を提供する。
【解決手段】300mmのウエハを収容可能なロードポートPのキャリアベース5に装着する200mmのウエハを収容可能な第2カセットK2を設置するカセットアダプタであって、アダプタ本体DのアダプタプレートEの裏面には、該アダプタ本体Dがカセット受台Bの傾斜配置位置から(90°−θ)だけ回動されて該アダプタプレートEを水平配置させるストッパボルト33と、前記アダプタプレートEの水平配置を検出するセンサ作動ボルト34が取付けられ、前記アダプタプレートEの上面には、第1カセット用着座センサS1を除き残りを無効にした状態で、第2カセットK2の正しい位置への着座を検出する第2カセット用着座センサを設ける。
(もっと読む)
ロードポート、EFEM
【課題】FOUP内にウェーハを出し入れする際に、設置時における水平バランスの不的確さに起因するFOUP又はウェーハとの不意な干渉を防止することが可能なロードポートを提供する。
【解決手段】マッピング装置Mを、高さ方向に移動可能な昇降部6と、昇降部6に接続され且つ先端部にセンサ部8を設けた進退部7とを用いて構成し、進退部7をFOUPx内にセンサ部8を進入させてウェーハWを検知可能とするマッピング位置(P2)と先端部をFOUPx外に退避させた状態とする退避位置(P1)との間で移動可能とするとともに、進退部7をマッピング位置(P2)よりも先端部をFOUPx内に進入させてウェーハWを載置可能とする載置位置(P3)に移動可能とし、この進退部7及び昇降部6を用いてウェーハWをFOUPx内とウェーハ搬送室B内との間で移送する移送装置Hを構成したロードポート1とした。
(もっと読む)
FIMSシステムで実施されるポッドロードインタフェース装置
【課題】FIMSシステムにおいて、ウエハが外部の環境に汚損されることなく、移送を可能とするボックスロードインタフェース
【解決手段】ボックスロードインタフェース16が備える並進機構は、移送ボックス18のボックスドアに取付け可能なポートドアを備え、前記ボックスドアを移送ボックス18に対し、接近、及び離間し移送ボックス18を開閉する。摺動トレー24は移送ボックス18をポートプレート14に対し接近、又は離間するように動かす。クランプ機構は移送ボックス18をクランプする。前記ボックスドアが移送ボックス18から離れて動いた後、昇降機組立体28は並進機構に協働して前記ポートドアを動かす。差動光走査組立体は移送ボックス18内部のウエハ試料の位置を検出する。ロボット組立体は前記ウエハ試料を移送ボックス18内から除去、及び挿入する。直線移動組立体は前記ロボット組立体を支持し、親ねじナット機構を駆動し移動する。
(もっと読む)
基板処理装置
【課題】移載機の加速領域での検知精度の低下を防止する基板処理装置を提供する。
【解決手段】ウエハを検知する透過型光学式センサを移載機に水平方向外向きに取り付ける。前記透過型光学式センサは投光素子から前記ウエハに照射されて前記ウエハを透過した光を受光素子によって受光するように構成する。前記透過型光学式センサは移載エレベータのサーボモータに接続されたPLCに接続する。前記PLCは前記透過型光学式センサからのウエハ検知信号と、前記移載エレベータによる位置信号とによってポッドにおける前記ウエハの位置を検知する。また、前記PLCは前記サーボモータからの回転速度信号によって前記移載機の前記ポッドに対する昇降移動における等速領域を判定する。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、ハンド4の先端付近に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
基板搬送ロボットの状態監視装置
【課題】基板搬送ロボットを用いた基板の搬送においてトラブルが発生した場合に、その搬送トラブルの発生原因を特定するための情報を提供することができる基板搬送ロボットの状態監視装置を提供する。
【解決手段】カセット10内に収納された複数の基板11を搬送するロボット30の状態を監視するための情報を提供する状態監視装置であって、カセット10内に収納された基板11の位置及び姿勢に関する位置・姿勢情報を取得するための情報取得手段3、4、15と、位置・姿勢情報を記憶するための記憶手段7と、位置・姿勢情報を表示するための表示手段8と、を備える。
(もっと読む)
フープオープナ及びその動作方法
【課題】フープの蓋であるフープドアの閉状態の異常を迅速且つ確実に検知することができるようにすること。
【解決手段】半導体処理装置の内外を仕切るポートプレート40の開口窓41に着脱可能に装着されるポートドア42と、フープ10をフープドア着脱位置に位置決めするドックユニット60とを備えており、ポートドア42に、吸盤機構43とフープドア30をフープ本体20に固定すると共に固定を解除するためのロック機構44とが設置されているフープオープナMであって、ドックユニット60上のフープドア着脱位置に位置するフープ本体20に固定されたフープドア30がフープ本体20の開口部21に正常に装着されているか否かを検知するフープドア検知センサ80,90をポートプレート40に設置した。
(もっと読む)
アライナ
【課題】 スループットを向上することできるアライナを提供する。
【解決手段】 アライナ1は、ストッカ3と、アライメント機構4と、昇降機構5とを有する。ストッカ3は、25組の一対の支持部14,14を有する。一対の支持部14,14は、ウエハ2を支持可能に構成されている。これら一対の支持部14,14は、ウエハ2が上下方向に並ぶように上下方向に並設されている。ストッカ3は、これら一対の支持部14,14にウエハ2を支持させることで、複数のウエハ2をストックできるように構成されている。アライメント機構4は、このようにストックされたウエハ2の位置を調整する機能を有する。昇降機構5は、アライメント機構4をアライメントするウエハ2の所まで昇降させる機能を有する。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて搬送効率を低下させない。
【解決手段】搬送車システム1は、搬送車3と、CWセンサ57と、製造コントローラ21とを備えている。搬送車3は、複数の装置間で基板50が入ったキャリア49を搬送する。CWセンサ57は、キャリア49内の基板50の状態を検出する。製造コントローラ21は、搬送車3の搬送を制御するとともに、CWセンサ57から異常信号が入力されれば、搬送車3が装置からキャリア49を他の装置に搬送するのを中止させる。
(もっと読む)
基板収納状態検出装置及び基板収納状態検出方法
【課題】基板収納容器の各スロットに収納されている基板の収納状態を定量的に表す指標として少なくとも基板の飛び出し量及び基板の垂れ量を簡易な構成で速やかに検出する。
【解決手段】基板11の配列方向及び基板11の搬出方向に交差する方向から見た各スロットに収納されている基板11の開口部19側の端部の画像を撮像する撮像手段3と、撮像手段3により撮像された画像に基づいて、各スロットに収納されている基板11の収納状態を定量的に表す指標として、所定の収納位置から開口部19の前方へと飛び出している基板11の飛び出し量と開口部19側の端部が垂れている基板11の垂れ量とを検出するとともに、検出された基板11の飛び出し量及び垂れ量を出力する基板収納状態検出手段61と、を備える基板収納状態検出装置。
(もっと読む)
基板処理装置、基板処理方法及び記憶媒体
【課題】横並びに複数配置された載置台上の搬送容器から基板搬送機構により基板を取り出して処理を行うにあたり、載置台上の搬送容器内の基板の高さ位置を正確に求めること。
【解決手段】載置台11を複数配置すると共に、少なくとも2つの載置台11の並びに沿って前記大気搬送室22内を移動自在な撮像ユニット41を設けて、載置台11上のFOUP1内においてウエハWが収納される収納領域2全体を撮像ユニット41により一括して撮像し、この撮像結果に基づいて前記FOUP1内のウエハWの高さ位置を検出する。
(もっと読む)
レチクル保護装置及び露光装置
【課題】レチクルを保護する保護部材を設けた場合でも、レチクルを搬送して露光装置の取り付ける場合に、適当な位置に取り付け可能なレチクル搬送装置を提供する。
【解決手段】位置測定装置29はレチクル1の下面に形成された位置測定用マーク26の位置を測定し、これによりレチクル1の位置を測定する。位置測定装置30は、下蓋2bの下面に形成された位置測定用マーク27の位置を測定し、これにより下蓋2bの位置を測定する。レチクル1の位置と下蓋2bの位置が分かれば、レチクル1と下蓋2bの相対的な位置ずれが分かる。よって、搬送装置によりレチクル1を搭載した下蓋2bを搬送して露光装置にセットするとき、このずれを勘案して下蓋2bの停止位置を決定することにより、レチクル1を正しく露光装置にセットできる。
(もっと読む)
基板処理装置
【課題】複数の基板保持具を用い、移載及び回収位置が反応炉直下ではなかった場合でも基板の保持状態を確認でき、一方の基板保持具にて異常を検知した場合に該一方の基板保持具から正常な基板を回収すると共に、他方の基板保持具からも同様に正常な基板を回収できる基板処理装置を提供する。
【解決手段】基板7を保持する複数の基板保持具21a、21bと、基板7に所定の処理を行う反応炉11と、前記基板保持具21a、21bに対して基板7の移載と回収を行う基板移載機41と、前記基板保持具21a、21bを識別する識別手段と、基板7の保持状態を検知する検知部と、前記基板移載機41を制御する制御部とを具備し、該検知部が基板7の異常を検知した際には、前記制御部は検知した基板7の保持状態、前記識別手段による識別結果に基づき、基板7を前記基板移載機41により回収する。
(もっと読む)
1 - 20 / 89
[ Back to top ]