
Fターム[5F031JA45]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出する情報 (3,081) | 物理量 (856)
Fターム[5F031JA45]の下位に属するFターム
Fターム[5F031JA45]に分類される特許
301 - 314 / 314
フォトマスクのクリーニング及び検査の可能性を設けるフォトマスク用操作装置
電子部品の製造において用いられるレチクル用検出/クリーニング装置であって、検出/クリーニング装置がクリーニングユニットを有し、その中にクリーニングチャンバーが構成されている。圧縮液体クリーニング媒体の導入用の少なくとも1つのガス供給がクリーニングチャンバーへ通じる。ガスをクリーニングチャンバーから放出する少なくとも1つの吸引手段がクリーニングチャンバーから通じる。クリーニングチャンバーはレチクルを導入し且つ取り除く少なくとも1つの第1開口部を有する。半導体製造で用いられる品物の汚染を検出する検出ユニットが設けられる。検出ユニットは検出手段を有し、その中へレチクルが検出ユニットの1つの送り側から導入され得る。クリーニングチャンバーの第1開口部と送り側は互いに反対側にある。送り装置はクリーニングユニットと検出ユニットとの間のレチクルを交換するために設けられる。  (もっと読む)
(もっと読む)
基板搬送装置及び基板搬送方法

【課題】 基板の搬送における基板の位置ずれの発生を防止するとともに、全ての種類の基板の生産効率を最適化することができる基板搬送装置を提供する。
【解決手段】 ウエハ搬送装置3は、L/M12内に配置された搬送アーム13と、L/M12の側面において半導体ウエハWを収容するフープ10A〜10Dに対応して設けられたシャッタ37A〜37Dの前に配置された面粗度センサ30A〜30Dと、ウエハ搬送装置3の各構成要素の動作を制御する制御部36とを備え、面粗度センサ30は、搬送アーム13によってフープ10から取り出された半導体ウエハWの裏面の面粗度を測定し、制御部36は、該測定された面粗度に基づいて搬送アーム13による半導体ウエハWの搬送速度を設定する。
(もっと読む)
ミニエンバイロメントポッドと装置との間の真空インタフェース

【課題】平坦な物品を装置へまたは装置から搬送するための機器を提供する。
【解決手段】搬送ポッド1を、耐漏洩性の方式で処理装置9の物品通過開口部11に結合することができ、シーリングが、間に配置されたインタフェース周辺ガスケット16によって得られる。ポッドドア4を、インタフェースドア12に選択的に固定することができ、これらドアを、1つのユニットとして、ドアアクチュエータ14からの駆動の下で横断ストロークが後に続く軸方向ストロークに沿ってともに動かすことができる。搬送ポッド1は、保持手段15によって保持される。2つのドアの周りの周辺容積21を、ポンプ22とダクト23によってポンプ排気することができる。ポッドドア4を、ロック手段20によって搬送ポッド1にロックすることができ、ロック手段20は、搬送ポッド1が処理装置9から分離している間の良好なシーリングを保障する。
(もっと読む)
ウエハ保管装置、ウエハ保管方法、ウエハ搬送装置、およびウエハ搬送方法
【課題】 ウエハカセットなどのウエハ保持容器を経て搬送するウエハへの前記ウエハ保持容器でのパーティクルの付着をなくし、配線ショート等のパターン形成不良の発生を防止する。
【解決手段】 複数のウエハ処理工程間でウエハ4を保管するウエハ保管装置20を、ウエハ4をウエハ表面4aが上下方向に沿う向きに保持するウエハカセット1と、ウエハカセット1内に上下方向の気流を流す気流取り入れ口23a,排気口24aなどからなる気流発生機構と、ウエハカセット1の上流部で前記気流に対してイオン化を行うイオン化機構22とを備えた構造とする。これにより、ウエハカセット1内の雰囲気中のパーティクルや、複数枚保持されたウエハ4の内の他のウエハ4に付着していたパーティクルが、重力作用によってウエハ表面4aに落下すること、および、ウエハ表面4aへ静電吸着することを防止可能である。
(もっと読む)
ステージ制御装置及び方法、露光装置及び方法、並びにデバイス製造方法
【課題】 ウェハステージのステップ長が変わる場合であっても、オートフォーカスエラーのばらつきを良好に低減することができるステージ制御装置等を提供する。
【解決手段】 フィードバック制御部70aは、ウェハを保持するウェハステージのXY平面内の移動に合わせてウェハステージのZ方向の位置及び姿勢を、センサ79の検出結果に応じてフィードバック制御する。フィードフォワード制御部70aは、ウェハ上のあるショット領域に対する露光処理を終えてウェハステージをX方向にステップ移動させた後で、他のショット領域に対する露光処理を行うためにウェハステージをY方向に同期移動させるときに、X方向へのステップ長に応じてウェハステージのZ方向の位置をフィードフォワード制御する。
(もっと読む)
半導体装置の製造方法、半導体装置の搬送システム及び搬送容器内酸化装置
【課題】 搬送容器内で膜厚制御可能に酸化膜を形成する。
【解決手段】 搬送容器内酸化装置10を、密閉式の搬送容器として使用するフープ10aに構成する。フープ10aには、フープ10a内の環境を、酸化環境と非酸化環境とに適宜切り替える環境切換手段20を設ける。環境切換手段20は、フープ10a内に開管したガス供給管21と、ガス供給管21に設けたフィルタ22、ガス切換弁23とから構成する。かかるフープ10a内に半導体ウエハを収納して搬送する途中で、環境切換手段20で、フープ10a内を酸化環境に設定することで、所望膜厚の酸化膜を形成する。
(もっと読む)
搬送装置及びその制御方法並びに真空処理装置
【課題】回転用モータの回転駆動力を搬送用アームに正しく伝達させるとともに回転駆動軸の回転角度を正確に検出することにより、搬送部における搬送対象物を正しい位置に搬送可能な搬送装置を提供する。
【解決手段】本発明の搬送装置1は、気密構造を有するハウジング61内に、所定の同心回転軸を中心として互いに独立して回動可能に構成された第1〜第3駆動軸1a〜1cと、第1〜第3駆動軸1a〜1cの所定の部位にそれぞれ取り付けられた永久磁石32a〜32cと、永久磁石32a〜32cと対応して設けられた電磁コイル34a〜34cとが配設されている。電磁コイル34a〜34cに対し所定の情報に基づいて駆動電流を供給して第1〜第3駆動軸1a〜1cを駆動し、第1〜第3駆動軸1a〜1cに固定された第1及び第2リンケージ12a、12bによって搬送対象物を搬送する。
(もっと読む)
部品の製造方法及び部品製造装置
【課題】 ノズルとノズルユニットの加工、組立てばらつきを吸収して、ステージとノズルとの距離を一定に調整することが可能な部品の製造方法及び部品製造装置を提供する。
【解決手段】 高さ設定ユニット41と上下駆動ユニット21との間に、ノズル32を配置し、モータ22を回転させて、高さ設定ユニット41の一定高さを検知した時のモータ22の駆動量を算出し、既知の上下駆動ユニット21から高さ設定ユニット41の一定高さまでの距離と、求めた上下移動ピン24下端までの距離とから、その差をノズル32の長さとして記憶させて、ステージ16と上下駆動ユニット21との距離、モータ22の駆動量に対する上下移動ピン24の下端の高さ位置、部品の高さ、及びノズル32の長さを使用し、ノズル32が部品の吸着位置に来るように上下移動ピン24の上下移動量を設定する。
(もっと読む)
搬送装置
【課題】 本発明の目的は、搬送を行う基板の材質や反りにより基板の吸着力が低下しても、確実に静電吸着により基板を保持して、搬送を行う基板搬送装置を提供することにある。
【解決手段】 本発明は、保持部に電極を形成し、電極に電圧を印加して、電極と被保持材との間に生じる電位差により電極と被保持材との間に静電保持力を発生させ、静電保持力により被保持材を保持して被保持材の搬送を行う搬送装置において、前記被保持材の搬送時に必要な必要保持力になるように、前記搬送装置の被保持材に対する静電保持力を変更することを特徴とする。
(もっと読む)
半導体ウエハの熱処理装置
【課題】 横型拡散炉への半導体ウエハの出し入れを安全に行うことができる半導体ウエハの熱処理装置を提供すること。
【解決手段】 この半導体ウエハの熱処理装置は、半導体ウエハ3を搭載するボート4と、このボート4を支持するフォーク5と、このフォーク5に接触する加重センサ8と、上記フォーク5のチルト量を調節するチルト量調節機構6と、上記加重センサ8の出力に基づいて上記フォーク5が略水平になるように上記チルト量調節機構6を制御するチルト量制御手段9aとを備える。そして、上記チルト量制御手段9aによって、上記半導体ウエハ3の重量を計測しながら上記フォーク5のチルト量を自動的に変更するので、上記半導体ウエハ3の熱処理毎に手間をかけることなく、上記フォーク5を確実に略水平にすることができる。
(もっと読む)
ウェハ輸送コンテナのパージング
本発明の実施形態は、標準化機械インタフェース(SMIF)ポッドなどの搬送コンテナをパージングする方法およびシステムを対象にしている。詳細には、浄化されたパージガスを使用して、コンテナと密閉チャンバ(たとえば半導体処理ツール)を、密閉チャンバの環境に対する有機物および他の有害な汚染物質による有害な汚染を伴うことなくインタフェースさせることができるよう、前面作動統一ポッド(FOUP)および他の非気密封止搬送コンテナを浄化することができる。この方法およびシステムを使用して、電子材料を製造し、かつ、処理している間、ウェハ、半導体コンポーネント、および極めて清浄な環境への露出を必要とする他の材料などの対象を搬送することができる。  (もっと読む)
(もっと読む)
ワークハンドリング装置
本発明のフークハンドリング装置は、ワークを載せるトレイを担持すると共に所定方向に往復動自在な可動テーブル(21)、ワークに対して所定の処理を施す処理部(30)を略中央に挟むようにしてトレイと処理部との間で往復動自在に配置され,かつ,ワークを搬送するべく水平方向及び鉛直方向に駆動される関節型アーム(410)及びその先端に設けら
れた複数の吸着ヘッド(420)をそれぞれ有する一対のハンドラ(40,40’)、一対のハンドラ及び可動テーブルを駆動制御する制御ユニット(70)を備え、制御ユニットは、トレイから処理部への未処理ワークの搬入動作及び処理部からトレイへの処理済みワークの搬出動作の両動作を,一対のハンドラにそれぞれ行わせるように駆動制御する。これにより、装置が完全に停止するのを防止できる。 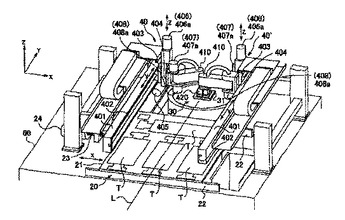 (もっと読む)
(もっと読む)
無人搬送車の移載機ハンドのティーチング方法
【課題】移載機ハンドの移載ポートに対する正確な移載位置を、人間の感覚に頼ることなく短時間で教示することができる無人搬送車の移載機ハンドのティーチング方法を提供すること。
【解決手段】移載機ハンドHの移載機ポート1に対する移載位置を教示するに際し、移載機ハンドH側に所定の距離でターゲットTを検出する位置検出センサ6を配設するとともに、移載機ポート1側に移載位置に合わせてターゲットTを配設し、前記位置検出センサ6によってターゲットTを検出することにより移載位置を教示する。
(もっと読む)
枚葉式の処理装置及び処理方法
【課題】 処理容器内に晒される軸受をなくして、パーティクルの発生を完全に防止することができる枚葉式の処理装置を提供する。
【解決手段】 処理容器32内にて載置台38上に載置された被処理体Wに対して所定の処理を施す枚葉式の処理装置において、前記載置台を浮上させる浮上用磁石機構60と、前記載置台の周縁部に設けた羽根部材44と、前記羽根部材に対して不活性ガスを噴射させて前記載置台に回転力を付与する回転用ガス噴射手段64とを備えるように構成する。これにより、処理容器内に晒される軸受をなくして、パーティクルの発生を完全に防止する。
(もっと読む)
301 - 314 / 314
[ Back to top ]