
Fターム[5F044DD02]の内容
ボンディング (23,044) | 光学的ボンディング位置検知 (102) | 位置検知 (47)
Fターム[5F044DD02]の下位に属するFターム
Fターム[5F044DD02]に分類される特許
1 - 17 / 17
ボンディング装置
【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
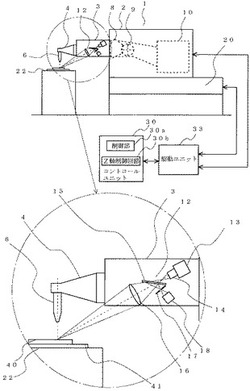
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
振動装置、光スキャナ

【課題】電圧が印加されて圧電素子が伸縮することにより、導線と電極との接合部分に負荷が加わり、導線が破損することを防ぐ振動装置及び光スキャナを提供する。
【解決手段】電圧が印加されて伸縮する圧電素子と、前記圧電素子に設けられる第1電極と、前記圧電素子と別体に設けられ、電源からの電圧が印加される第2電極と、前記第1電極と前記第2電極とを電気的に接続する導線と、を備える振動装置であって、前記導線と前記第1電極との接続部分である第1接続部分と、前記導線と前記第2電極との接続部分である第2接続部分との少なくとも一方に設けられ、前記導線の太さが、前記接続部分に向けて太くなるネック部と、前記圧電素子による伸縮に伴って変位する前記ネック部の境界に設けられる補強材とを備える振動装置。
(もっと読む)
ワイヤボンディング装置
【課題】ワイヤショートの有無を、自動的に、かつ、ワイヤボンディングの作業を停止せずに確認可能な、ワイヤボンディング装置およびこの装置を用いたワイヤボンディング方法を提供する。
【解決手段】周回単位でワイヤをボンディングするたびに、その形状を計測して記憶する。さらに、記憶された計測結果に基づいて、上下に隣接するワイヤ同士の間隔を演算することで、ワイヤショートの有無が判定される。
(もっと読む)
半導体装置の製造方法およびボンディング装置
【課題】半導体装置の生産性に大きく影響をおよぼさず、かつ、ボールのつぶれ形状を一定形状に保つことができる半導体装置の製造方法、ボンディング装置を提供する。
【解決手段】ボンディング装置1は、ボール12のボンディング条件を記憶した記憶部13と、半導体素子Sに対して接触させキャピラリ11のZ軸における第一の位置を検出するとともに、キャピラリ11先端のボール12に対してボンディングした際のキャピラリ11のZ軸における第二の位置を検出する検出部14と、検出部14で検出した第一の位置と、第二の位置との差であるボール12のつぶれ量およびボンディング時間を算出し、一定時間あたりのボール12のつぶれ量を算出する算出部15と、一定時間あたりのボール12のつぶれ量が、所定の数値範囲外である場合にはボンディング条件を調整する第一調整部16を有する。
(もっと読む)
ワイヤボンディング方法、半導体装置の製造方法、およびワイヤボンディング装置
【課題】ペレットにワイヤボンディングを行う際の位置あわせ工程において、ボンディングワイヤのボールをつぶすことなく処理を迅速に行う。
【解決手段】キャピラリを含むボンディングツールを用いて、処理対象のペレットを当該ペレットが載置された基体とボンディングワイヤで接続する際のペレットの位置あわせを行う工程は、キャピラリが平面視でペレットが配置されるべき位置あわせ領域と重ならない位置かつキャピラリの先端が位置あわせ領域に配置されるべきペレットの上面よりも低い位置になるようにボンディングツールを垂直方向に移動した後、ボンディングツールを水平移動させ、キャピラリの側面にかかる水平方向の荷重を検知することにより、位置あわせ領域におけるペレットの存在の有無を判断する工程を含む。
(もっと読む)
ボンディング装置及びボンディング装置のオフセット量補正方法
【課題】簡便な方法で、カメラの光軸が傾いている場合でも良好なボンディングを行う。
【解決手段】基準部材が視野内の中心となるようにボンディングヘッドの位置を調整した後、ボンディングヘッドをマイナスX方向にオフセット量だけ移動させてボンディングツールと基準部材との第1の画像を取得し、この画像から第1のズレ量を取得し、基準部材を上昇させた後、基準部材が視野内の中心となるようにボンディングヘッドをプラスX方向に移動させた後、ボンディングヘッドをマイナスX方向にオフセット量だけ移動させてボンディングツールと基準部材との第2の画像を取得し、第2の画像からボンディングツールと基準部材との第1の方向の第2のズレ量を取得し、第1のズレ量と第2のズレ量との差と基準部材のZ方向の移動量に基づいてオフセット量を補正する。
(もっと読む)
ワイヤボンディング装置
【課題】簡単な構成で的確にピンレスプルテストを行えるようにする構造体を提供する。
【解決手段】モータ制御装置は、リニアモータの推力補正値Fcを設定する推力補正値設定部と、推力補正値Fcを加算して目標推力Fを補正する目標推力補正部とを備える。プルテスト実行時には、沈み込み平均量差Yaveが上限閾値Zよりも大きい場合(ステップ7:Yes)、沈み込みによる荷重変化分(K・Ymax)をプルテスト荷重Ltに加算すべく、荷重変化分(K・Ymax)を推力補正値Fcとして目標推力Fに加算する推力補正を行い(ステップ9)、再度プルテスト荷重Ltを印加する(ステップ4)。
(もっと読む)
実装装置における冷却構造及び冷却方法
【課題】レンズ、ハーフミラー、プリズムといった光学系部材の熱膨張を防ぐことができるとともに、被接合物周囲の空気層のゆらぎを解消し、同時に、全体の厚さを薄くして小型化に貢献することができる実装装置における冷却構造及び冷却方法を提供する。
【解決手段】光学系機器10の筐体11内に形成された収納空間11Aに、光学系機器10の光路13と、冷却用エアーが供給されるエアー流路20とを共に設ける。
(もっと読む)
ボンディング方法、ボンディング装置及び製造方法
【課題】高速で均一なループを形成させる。
【解決手段】ボンディング装置1は、キャピラリ5をボンディング位置まで下降させて、オーバーハングダイ100のパッド104にイニシャルボール10をボンディングするが、その際、所定時間ごとに、キャピラリ5のZ軸方向の位置を検出するとともに、荷重センサ7で検出した荷重を検出して蓄積しておく。そして、蓄積したキャピラリ5に作用する荷重とキャピラリ5の位置とを参照して、荷重変化点を検出して、この荷重変化点におけるキャピラリ5の荷重変化位置からボンディング位置を減算することで、荷重変化位置からボンディング位置に至るキャピラリ5の移動量Zを算出する。そして、この算出した移動量Z分、キャピラリ5を上昇させた後、パッド104とリード105との間にワイヤループを形成させる。
(もっと読む)
ワイヤボンディングの接合状態確認方法
【課題】検査精度を向上させて信頼性の高い検査を行うことができるワイヤボンディングの接合状態確認方法を提供すること。
【解決手段】ワイヤボンディング工程を行う前に、空打ちボンディングワイヤ5の両端を半導体素子2の外部のリード部3で接合させる空打ち工程と、空打ち工程によってボンディングワイヤ4のツールとボンディングワイヤ4の位置を合わせる位置調整工程と、空打ち工程により形成した空打ちボンディングワイヤ5を引き剥がすようにして接合強度を測定する接合強度検査工程を行うようにした。
(もっと読む)
電極パターンおよびワイヤボンディング方法
【課題】アイレット上にサブマウントと半導体チップを接着するパッケージへの実装形態において、組立装置の精度の影響によりアイレットの中心線とレーザダイオードの中心線が傾き、ワイヤボンディングのためのAuボールが電極外にはみ出してしまう。
【解決手段】ワイヤボンディング用の電極パターンが、ワイヤボンド基準パターンと、ワイヤボンド認識パターンを有し、ワイヤボンド基準パターンからワイヤボンディング位置までの距離と、ワイヤボンド認識パターンからワイヤボンディング位置までの距離を所定の値に設定することで、精度良くワイヤボンディングを行うことができる。
(もっと読む)
半導体装置の製造方法
【課題】感光性ポリイミド膜の膜厚に基づく色の差を抑制する半導体装置の製造方法を提
供する。
【解決手段】既定の膜厚を有する基準となる感光性ポリイミドの色を予め測定する工程と
、半導体基板11の表面に、この基準となる感光性ポリイミドの膜厚より厚く、改質前の
感光性ポリイミド21を塗布する工程と、色を表わす物理量の内の少なくとも1つの物理
量と露光量との関係を示す所定の加熱処理条件で予め求めておいた検量データに基づいて
、感光性ポリイミド21に対して、測定された基準となる感光性ポリイミドにおける色の
物理量との差が所定の範囲内となるような露光量でエネルギー線42を照射する工程と、
感光性ポリイミド21に対して上述の所定の加熱処理条件にて加熱処理を行う工程とを備
えている。
(もっと読む)
ボンディング装置
【課題】オフセット補正においてツールの位置の測定を正確に実行する。
【解決手段】上面にリファレンスマーク130aを設けたプリズム130をリファレンス台11上に設け、他方、位置検出用カメラ7をリファレンスマーク130aの真上に配置した場合においてツール4をX方向およびY方向からそれぞれ斜め下向きに基準パターンLx,Lyを照射するような位置に、光源であるレーザダイオードを配置する。そして、位置検出用カメラ7によりリファレンスマーク130aを撮像し、ずれ量ΔX1,ΔY1を求める。次に、その状態で位置検出用カメラ7によりプリズム130を介してツール4を撮像し、ずれ量ΔX2,ΔY2を求める。これらのずれ量と、リファレンスマーク130aとレーザダイオードの撮像基準位置とのずれ量から正確なオフセット量を算出する。
(もっと読む)
ワイヤボンディング装置、ボンディング制御プログラム及びボンディング方法
【課題】電気的不着検出のできない特定ボンド点について、ボンディング工程中に撮像手段を用いた光学的不着検出による不着検出を行い、短時間に精度よく不着検出を行うことができるワイヤボンディング装置、ボンディング制御プログラム及びボンディング方法を提供する。
【解決手段】電気的不着検出工程と、光学的不着検出工程とを備え、それぞれの第1ボンド点が電気的不着検出工程を適用することができない特定ボンド点であるかどうかのデータを記憶部34から取得して、第1ボンド点が特定ボンド点であると判断された場合に、光学的不着検出工程によって不着確認を行い、特定ボンド点でない場合には電気的不着検出工程によって不着検出を行う。
(もっと読む)
半導体装置の製造方法
【課題】 半導体装置の製造歩留まり向上を図る。
【解決手段】 半導体装置の製造において、
ワイヤボンディング工程において、予め半導体チップ2の電極パッド3側の基準高さ位置(第1の基準高さ位置)は、高さ検出治具22の第1の面23aにキャピラリ20の先端を接触させて電極パッド3の高さ位置を検出することによって求め、半導体チップ2の周囲に配置されたリード4側の基準高さ位置(第2の基準高さ位置)は、高さ検出治具23の第2の面23bにキャピラリ20の先端を接触させてリード4のボンディング面の高さ位置を検出することによって求める。
(もっと読む)
ワイヤボンディング装置
【課題】 装置の連続運転中においても自動的にCTDを補正できるワイヤボンディング装置を提供する。
【解決手段】 本発明に係るワイヤボンディング装置は、ワイヤ7からなるボール8をワークにボンディングするツール6と、前記ツール6に対してCTDだけオフセットさせて配置された、前記ワークの位置を検出する位置検出用カメラと、前記ツール6及び前記位置検出用カメラを移動させる移動手段(例えばXYステージ)と、前記ツール6又は前記ボール8を前記位置検出用カメラに結像させる光学ユニットと、を具備することを特徴とする。
(もっと読む)
ボンディング装置
【課題】 フルオートモードで検出できなかった場合にセミオートモードに切り替えて、オペレータがマニピュレータを操作して検出できなかっICチップ等の定点に目合わせを行う。このとき、目合わせ位置を忘れたり、また、指定の位置でなく他の位置に目合わせすることがあり、これらを防止すること。
【解決手段】 目合わせ時に前もって記憶したICチップ6上の定点の画像を参照画像としてモニタに表示することにより、オペレータが参照画像を見ながら正確な位置に目合わせを行うようにする。
(もっと読む)
1 - 17 / 17
[ Back to top ]