
Fターム[5F047FA03]の内容
ダイボンディング (10,903) | ボンディング装置 (2,221) | ダイ供給部材、テーブルフィード (411) | θテーブル (30)
Fターム[5F047FA03]に分類される特許
1 - 20 / 30
半導体装置の製造方法および半導体装置の製造装置
【課題】高品質な状態で半導体チップを粘着シートから剥離し取り上げることができる半導体装置の製造方法および半導体装置の製造装置を提供する。
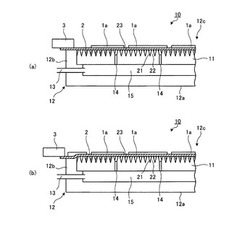
【解決手段】ピックアップ装置の保持ステージ10は、粘着シート2を介して半導体チップ1aが載置される第1ステージ11と、第1ステージ11を支持する第2ステージ12と、真空引き用の配管13と、を備える。第1ステージ11には、複数の溝21と、隣り合う溝21の側壁で構成された突起部22と、溝21に連結された通気孔14と、が設けられている。このピックアップ装置において、半導体チップ1aの端部全体が溝21上に位置しないように第1ステージ11に半導体チップ1aを載置する。そして、減圧手段によって粘着シート2、第1,2ステージ11,12で囲まれた閉空間23を減圧し、突起部22に半導体チップ1aを保持する。その後、コレットによって半導体チップ1aをピックアップする。
(もっと読む)
半導体製造装置及び半導体製造方法

【課題】半導体製造の後工程における実装処理のウエハ交換にかかる時間が短く、稼動効率の高い半導体製造装置及び半導体製造方法を提供する。
【解決手段】前記半導体製造装置の装置本体に着脱自在なウエハカセットと、前記ウエハカセットに収納可能であり、前記ウエハが搭載され、かつ前記半導体チップの情報を保有するバーコードが貼付されたウエハキャリアと、前記ウエハキャリアを載置可能で回転可能なバッファテーブルとバーコードリーダとを備え、かつ前記バーコードリーダに前記ウエハキャリアのバーコードの読み取り動作後に、前記ウエハキャリアの向きを前記被実装部材への実装動作のための向きに合わせるアライメント動作を行うバッファ装置と、前記バッファ装置と半導体チップのピックアップ位置との間で前記ウエハキャリアを搬送するXYθテーブルと、前記被実装部材に半導体チップを実装する実装機構が備えられていることを特徴とする。
(もっと読む)
ダイボンダ及びボンディング方法
【課題】本発明は、ボンディングヘッドに設けた基準ピンが基板へのボンディング時に、基板や周囲の部品に接触する等の干渉をせず、フライ認識時には、基準ピン及びダイのどちらも結像する点がずれず、画像がぼけないダイボンダ及びダイボンディング方法を提供することにある。
【解決手段】本発明ダイボンダ及びダイボンディング方法において、ボンディングヘッドは、ダイを吸着して保持する吸着ノズルと、基準ピンと、吸着ノズル及び基準ピンを取り付けた実装ヘッドとを具備し、部品認識カメラは、ボンディングヘッドの吸着ノズルに保持されたダイから出射される反射光を透過し基準ピンとダイの焦点距離をほぼ等しくする光学ガラスを具備し、基準ピンとダイを撮像するものである。
(もっと読む)
ダイボンダ及び半導体製造方法
【課題】
本発明は、ダイを正確にボンディングできる信頼性の高いダイボンダ及び半導体製造方法を提供することである。
【解決手段】
本発明は、ダイをウェハから吸着して基板にボンディングするボンディングヘッドと、前記ダイの位置を所定精度で前記位置決めする第1の調整機構を有し、前記ボンディングヘッドを位置決めする位置決めを機構と、前記位置決め機構を制御する位置決め制御部と、前記ボンディングヘッドに設け、前記第1の調整機構よりも高い精度で前記ダイの位置を調整する第2の調整機構とを有する。
(もっと読む)
ダイボンダ及び半導体製造方法
【課題】ダイのボンディング(実装)時間をより一層短縮できタクトタイムの短い、あるいはボンディング装置を小型にできるダイボンダ及び半導体製造方法を提供する。
【解決手段】ダイボンダまたは半導体を製造する半導体製造方法において、ダイをピックアップする領域をウェハの中心から放射状に分割し、分割された前記領域のうち実際にピックアップするピックアップ領域PRを有する前記ウェハの正対半円領域を基板が存在するボンディング領域BRに正対させ、ウェハリングを回転させて前記ピックアップ領域PRを順次選び、前記ダイを前記ピックアップ領域PRからボンディングヘッドでピックアップし、前記ダイを基板にボンディングする。
(もっと読む)
チップ搭載装置、傾き検出方法およびプログラム
【課題】チップ搭載装置が、ターゲットマークの付されてないウェハに対しても、より迅速に傾き補正を行えるようにする。
【解決手段】画像処理部610が、1行(横の並び)分の半導体チップの基準点の座標値を算出する。傾き検出部620は、座標値を算出された基準点の近似直線を求め、この近似直線の傾きを求める。駆動制御部630は、傾き検出部620が求めた傾きに基づいてチップ積載部50を回転させて傾き補正を行う。このように、基準点の座標値を求めて傾き補正を行うので、ターゲットマークの付されていないウェハに対しても傾き補正を行える。また、1行分の半導体チップの基準点に対して傾き補正を1回行えばよいので、より迅速に傾き補正を行える。
(もっと読む)
チップボンダ
【課題】電子部品片と相手側部材の超音波溶着を、簡単な構造で、且つ高速に行えるチップボンダを提供する。
【解決手段】中心軸を回転軸とするターレット10と、ターレット駆動モータ20と、ターレット10の周方向に複数設けられ、吸着ノズル33が設けられる超音波ホーン32と、超音波ホーン32を支持するホーン支持部材34と、ホーン支持部材34を上下方向に摺動可能に支持するケース31を備え、吸着ノズル33により電子部品片300を吸着するとともに、超音波ホーン32の超音波振動により電子部品片300と相手側部材を溶着する部品保持ユニット30と、部品保持ユニット30をターレット10に対して相対的に移動するように案内する部品保持ユニット案内装置50と、部品保持ユニット案内装置50に案内される部品保持ユニット30を押圧することによって、部品保持ユニット30を下方向に移動させる部品保持ユニット駆動装置80を備える。
(もっと読む)
ダイボンダ並びにピックアップ方法及びピックアップ装置
【課題】確実にダイを剥離できるピックアップ装置を提供する,またはピックアップ装置を用い、信頼性の高いダイボンダまたはピックアップ方法を提供する。
【解決手段】ダイシングフィルムに貼り付けられた複数のダイ(半導体チップ)4のうち剥離対象のダイを突き上げてダイシングフィルムから剥離する際に、ダイの周辺部のうちの所定部におけるダイシングフィルムを突き上げて剥離起点を形成し、その後、所定部以外の部分のダイシングフィルムを突き上げてダイをダイシングフィルムから剥離することを特徴とする。
(もっと読む)
電子部品の実装装置及び実装方法
【課題】半導体チップを基板に対して要求される条件に応じて実装することができる実装装置を提供することにある。
【解決手段】搬送レール1によって搬送されて実装位置に位置決めされる基板の搬送方向と交差する方向に対向して配置された半導体チップの供給部4と、供給部と搬送レールの間に配置された中間ステージ14と、基板の搬送方向と交差する方向に駆動可能に設けられた第1の実装ツール31e及び第2の実装ツール32eと、第1、第2の実装ツールの駆動を制御し、半導体チップを基板に精密実装するときには第1の実装ツールによって供給部から半導体チップを取り出させて中間ステージに載置させた後、第2の実装ツールによって中間ステージの半導体チップを取り出させて基板に実装させ、半導体チップを基板に高速実装するときには第1の実装ツールによって供給部から半導体チップを取り出させて基板に実装させる制御装置を具備する。
(もっと読む)
ペレットの位置認識装置、ペレットのマウント装置及び半導体装置の製造方法
【課題】コレットにより保持されているペレットの位置認識の精度及び信頼性を向上させる。
【解決手段】位置認識装置1は、光を照射する光照射部2を有する。更に、ペレット3を保持する保持部4と、光照射部2から照射される光を保持部4により保持されているペレット3へ向けて反射させる反射面5と、を有するコレット6を有する。更に、反射面5からの反射光によるペレット3の投影画像を撮像する撮像部7と、投影画像に基づき、保持部4により保持されているペレット3の位置を認識する画像認識部と、を有する。光照射部2は、光源9と、光源9からの光を平行光又は集束光に変換する光変換部10とを有し、変換後の光を一方向から反射面5に向けて照射する。反射面5は平面である。
(もっと読む)
部品の搭載装置、部品の搭載方法
【課題】部品Aを、部品Bに精度良く搭載する部品の搭載装置、部品の搭載方法を提供することを目的としている。
【解決手段】部品搭載装置の制御ユニット5は、画像認識部101と、画像認識部102と、基準位置座標変換部103と、固定パラメータ記憶部104と、キャリブレーション部105と、フレーム・パラメータ記憶部106と、第1補正量算出部107と、第2補正量算出部108と、第3補正量算出部109と、搭載座標算出部110とから構成されている。また、制御ユニット5には、カメラ2〜3とアーム駆動部6が接続されている。
(もっと読む)
半導体チップのピックアップ方法
【課題】時間短縮が可能な半導体チップピックアップ方法を提供する。
【解決手段】樹脂シート15上の複数個の半導体チップ17の画像(1)を取込み、画像(1)の良品チップ17a位置を算出しn番目良品チップ17aを選び、n番目良品チップ17aをピックアップ位置に向け樹脂シート15を移動し、n番目良品チップ17aを中心に画像(2)を取込み、画像(2)からn番目良品チップ17aの角度・位置を算出しn番目良品チップ17aの位置を必要なら補正し、n番目良品チップ17aがマウントヘッド31のピックアップ部33にピックアップされ、画像(2)の良品チップ17aの位置を算出しn+1番目良品チップ17aを選び、画像(2)からn+1番目良品チップ17aの角度・位置を算出しn+1番目良品チップ17aがピックアップ位置に向け樹脂シート15を移動し、n+1番目良品チップ17aが別のピックアップ部33にピックアップされる。
(もっと読む)
ピックアップ方法及びピックアップ装置
【課題】ピックアップの対象となるチップと、ピックアップの対象とならないチップとが整列したウエハから良品の対象チップをピックアップするピックアップ方法を提供する。
【解決手段】ピックアップ対象である対象チップ2と、ピックアップ対象でない非対象チップ3とを備えたウエハ1から、良品の対象チップ2をピックアップする方法である。対象チップ2のアドレス及び対象チップ2が良品であるか否かが記録されたマップ10を記憶し、ウエハ1に設けられた目印5を記憶し、所定位置離れた位置の対象チップ2を基準チップ6として、マップ上の基準チップ6のアドレス及び目印5と基準チップ6との位置関係を記憶し、目印5を認識可能位置に合わせ、目印5と基準チップ6との位置関係に基づいてマップ上の基準チップ6のアドレスとウエハ上の基準チップ6とが一致するように対応させて、良品のチップ2のみをピックアップする。
(もっと読む)
突き上げピンの位置決め方法およびその方法を用いた電子部品供給装置
【課題】予め突き上げピンに関するデータを持つことなく、突き上げピン先端部の中心位置を、自動的に計測することが可能な突き上げピンの位置決め方法およびそれを用いた電子部品供給装置を提供する。
【解決手段】エキスパンド台上のダイシングされたベアチップ等の部品Pを突き上げる突き上げピン45を、撮像装置25により上方より撮像し、撮像データに基づいて直交する2方向座標に対する輝度の累積値を表す累積ヒストグラムHX、HYを作成し、これら累積ヒストグラムの分布状態に基づいて各累積ヒストグラムの平均値をそれぞれ求め、これら平均値より突き上げピン先端部の中心位置を把握して位置決めする。
(もっと読む)
アクチュエータ
【課題】全体サイズの小型化、および製造コストの低廉化を図りながら、ロッドを正確に昇降操作および回転操作することができるアクチュエータを提供する。
【解決手段】本発明に係るアクチュエータ1は、ロッド2と、該ロッド2をスライド操作するスライド駆動部5と、ロッド2を回転操作する回転駆動部6と、ロッド2のスライド方向の変位量を検出するスライド位置検出部3と、ロッド2の回転角度を検出する角度検出部7とを備える。スライド駆動部5はリニアアクチュエータであり、ロッド2に設けられたムービングマグネット22と、ロッド2の外周面を囲むように非接触状態で配置されたリニアモータコイル21とで構成される。スライド位置検出部3はリニアセンサであり、ロッド2に配置された磁性マーク16と、ロッド2の外周面を囲むように非接触状態で配置された中空筒状のセンサヘッド17とで構成される。
(もっと読む)
半導体装置の製造方法
【課題】ウエハの中心位置を高い検出精度で検出する。
【解決手段】円形板状のウエハ(半導体ウエハ)20を準備する工程と、ウエハ20の位置決めをする前に予めウエハ20の中心位置Cを検出する工程とを有する半導体装置の製造方法である。ここで、ウエハ20の中心位置Cを検出する工程では、まず、ウエハ20のエッジ(外縁)20eを含むウエハ20の一部の画像データ20gを画像処理装置が取得する。次に、画像処理装置を用いて、ウエハ20のエッジ20eを構成する複数の座標点20hを中心として、ウエハ20の半径rと等しい半径を有する複数の円弧軌道(円弧の軌道)20kをそれぞれ求める。次に、画像処理装置を用いて、複数の円弧軌道20kの交点を求めることにより、ウエハ20の中心位置Cを算出する。
(もっと読む)
チップ供給装置
【課題】装置の小型化とパレットの交換時間の短縮を実現したチップ供給装置を提供する。
【解決手段】パレット収納部1に隣接して配置された移動テーブル15と、移動テーブル15のパレット収納部1側に配置され、パレット収納部1内のパレット2を保持して水平旋回することによりパレット2を移動テーブル15の中央部上方に位置させるパレット旋回機構と、移動テーブル15に配置され、パレット旋回機構によって移動テーブル15の中央部上方に位置させられたパレット2を固定するパレット固定機構と、移動テーブル15を水平移動させることにより、パレット固定機構によって固定されたパレット2のチップを所定のピックアップ位置P1に位置決めする動作と、パレット旋回機構に保持されたパレット2をパレット収納部1に出し入れする動作を行う水平移動機構を備えた。
(もっと読む)
画像認識カメラのキャリブレーション方法、部品接合方法、部品接合装置および校正用マスク
【課題】簡単な構成で、画像認識カメラのキャリブレーションを精度良く行うことができる画像認識カメラのキャリブレーション方法を提供する。
【解決手段】基準マークMa,Maを形成した透光性の校正用マスク31を用い、画像認識カメラ6により、上昇待機位置S2に移動した校正用マスク31の基準マークMa,Maを位置認識する第1マーク認識工程と、第1マーク認識工程の後に、校正用マスク31を降下させワークテーブル4にセットするマスクセット工程と、マスクセット工程の後に、画像認識カメラ6により校正用マスク31の基準マークMa,Maを、位置認識する第2マーク認識工程と、第1マーク認識工程および第2マーク認識工程においてそれぞれ位置認識した2つの認識結果に基づいて、校正データを取得する校正データ取得工程と、を備えた。
(もっと読む)
画像認識カメラのキャリブレーション方法、部品接合方法および部品接合装置
【課題】簡単な構成で、画像認識カメラのキャリブレーションを精度良く行うことができる。
【解決手段】基準マークMa,Maを形成した透光性の校正用マスク31を用い、所定の位置に移動した画像認識カメラ6により、保持ヘッド2に保持され上昇待機位置S2に移動した校正用マスク31の基準マークMa,Maを、一方の鏡筒21,22を介して位置認識すると共に、保持ヘッド2に保持され接合位置S1に移動した校正用マスク31の基準マークMa,Maを、他方の鏡筒21,22を介して位置認識するマーク認識工程と、マーク認識工程において位置認識した2つの認識結果に基づいて、校正データを取得する校正データ取得工程と、を備えた。
(もっと読む)
ダイボンダ及びダイボンディング方法
【課題】熱変形に影響うけることなく高精度のダイボンディングを行うことが可能なダイボンダ及びダイボンディング方法を提供する。
【解決手段】検出手段42にて、基準部位41に対するコレット23の3次元のオフセット量を検出する。制御手段43にて、オフセット量分の位置補正をコレット23に対して行う。基準部位41はボンディング対象位置近傍におけるボンディング対象物保持部の一部に設けられる。
(もっと読む)
1 - 20 / 30
[ Back to top ]