
Fターム[5H004GB16]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 物流工程、製造工程 (321) | ロボット(マニピュレータ) (133)
Fターム[5H004GB16]に分類される特許
21 - 40 / 133
軌道追従制御装置、方法及びプログラム
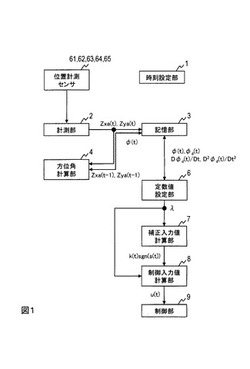
【課題】制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現する。
【解決手段】スライディング制御の式の中で登場する定数λの値をfとする。また、定数λの値を、制御対象物の状態変数X(t)(例えば位置)、制御対象物の目標とする状態Xd(t)(例えば目標位置)を用いて制御対象物の目標とする状態の一階微分(例えば目標速度DXd(t)/Dt)に応じて適宜修正する。これにより、スライティング制御の式の中で登場する制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)の項を消すことができ、制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現することができる。
(もっと読む)
学習歩行ロボット装置及びその制御プログラム

【課題】床面の状態が大きく異なりあるいは大きく変化するような領域でも安定した移動を可能とする学習歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】所定領域内のそれぞれの位置における床面の硬さ指標を測定する手段21と、それぞれの位置を表す位置情報と硬さ指標とを対応付けて硬さ情報として保存する手段41と、所定領域内の学習歩行ロボット装置の現在位置を同定する手段35と、同定された現在位置における床面の硬さ指標を硬さ情報から決定する手段36と、決定した床面の硬さ指標に基づいて歩行形態を選択して歩行動作を制御する手段22〜28とを有し、手段21は、学習歩行ロボット装置が直立した姿勢を保持したまま足首の関節ロール軸アクチュエータを駆動したときのアクチュエータに流れる電流値に基づいて、アクチュエータに流れる電流値が大きいほど床面が硬いとする硬さ指標を対応付ける。
(もっと読む)
モータ制御装置
【課題】 モデル制御系のパラメータを簡単に調整でき、しかも、モデル速度制御器から出力されるトルク指令が過大になることがなく、より高速で振動のない位置決めを実現できるモータ制御装置を提供する。
【解決手段】 モデル制御系1は、モータについての第1の慣性系の機械モデルと、負荷についての第2の慣性系の機械モデルと、モータと負荷との間のねじりトルクについてのねじりトルクモデルと、フィードバック加速度指令S10をモデルトルク指令部8にフィードバックする第1の状態フィードバック系と、フィードバック速度指令S5をモデル速度指令部5に状態フィードバックする第2の状態フィードバック系とを備えている。モデル制御系の状態方程式から得られる特性方程式が4重根を持つように演算して得たパラメータの関係式に基づいて、モデル制御系のパラメータが定められている。
(もっと読む)
連続システムをマルコフ決定過程に変換するための方法
【課題】最適な制御シーケンスをMDF及び連続状態空間システムについて見つけることができるように、所与の連続状態空間動的システムを離散状態空間を有するマルコフ決定過程(MDF)に変換する。
【解決手段】連続動的システムが、離散状態を有するマルコフ決定過程に変換される。連続システムの所定の数の連続状態が選択される。各連続状態は、MDPの1つの離散状態に対応する。ドローネ三角形分割が連続状態に適用されて、一組の三角形が作成される。各三角形の頂点は連続状態を表す。各離散状態について、次の離散状態y=f(x,a)が求められる。xは、その離散状態に対応する連続状態を表し、aは制御動作であり、fは、連続状態の非線形遷移関数である。次の離散状態yを含む特定の三角形が識別され、次の離散状態yは、その特定の三角形の頂点によって表された連続状態xに対応する離散状態に遷移する確率として表される。
(もっと読む)
モデリング・システムの処理システム、方法及びプログラム
【課題】設計のためのモデリング・ツールにおいて、定量基準によりシステム表現の簡略化可能部分を自動判別する。
【解決手段】SysMLのブロックから数式が抽出され、または、Simulink(R)のブロック線図が微分方程式に変換され、その係数は、級数展開される。先ず、微分方程式を、CASにより通常どおり解きその解も、好適には級数展開される。次に、区間解析の技法により、区間係数として、CASによって微分方程式を含む数式を解く。区間解析の結果の解と、保存されている、普通に解いた解の係数ベクトルを比較して、ベクトル間距離が既定値以下であれば、対象としている係数を0にして、CASによって微分方程式を含む数式を解く。そこで再度、結果の解と、保存されている、普通に解いた解の係数ベクトルを比較して、ベクトル間距離が既定値以下であれば、対象としている係数の項を微分方程式から落とし、微分方程式を簡易化する。
(もっと読む)
制御装置、制御方法及びコンピュータプログラム
【課題】制御対象となる系の数が膨大であっても、所望の収束点に系の挙動を収束させることができる制御装置、制御方法及びコンピュータプログラムを提供する。
【解決手段】N個の系の状態に基づいて決定される評価値が目標値にどれくらい近いかを反映した変数Actの値を記憶する。変数Actの値とN個の系のそれぞれの現在の挙動とに応じて、系がとるべき次の挙動を決定する。N個の系のそれぞれの挙動が安定しているか否かを判定し、少なくとも一の系の挙動が安定していないと判定した場合、安定していないと判定された系がとるべき次の挙動を、正数である変数Actにノイズ値を乗算して決定する。
(もっと読む)
ロボットの制御装置
【課題】関節に連結されたリンクを揺動させるロボットの制御装置であり、可動範囲の境界付近でのオーバーシュートを抑制するとともに、可動範囲の境界付近以外では応答速度を向上させることのできるロボット制御装置を提供する。
【解決手段】ロボット制御装置は、センサによって計測された計測関節角を目標関節角に追従させるフィードバック制御器と、フィードバック制御器とロボットの機構系によって構成される閉ループ系の特性多項式の根を変更する極配置器を備えている。その極配置器は、予め定められた関節の可動範囲を、可動範囲の境界を含まない第1可動許容範囲と、第1可動許容範囲の外側に設定された第2可動許容範囲とに区分して記憶している。また極配置器は、計測関節角が第1可動許容範囲内に存する場合は前記特性多項式に複素根を設定し、計測関節角が第2可動許容範囲内に存する場合は前記特性多項式に実根を設定する。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
モータ制御装置
【課題】 指令のN階微分値を矩形波とするとともに、その矩形波をN階積分して負荷位置指令とし、制御対象の加速度が制限値を超えないようにした上で、位置決め時間を可能な限り短縮することができるモータ制御装置を提供する。
【解決手段】 制御対象のパラメータに基づく振幅および時間幅を有する矩形波信号PSを生成して出力する矩形波生成部と、矩形波信号PSをN階積分し負荷位置指令信号XLrefを演算して出力するN階積分演算部と、負荷位置指令信号XLrefに基づいて位置指令信号Xrefを生成して出力する最適指令生成部3と、位置指令信号Xrefおよびモータ位置XMに基づいてトルク指令Trefを制御演算するサーボ制御部4とを備える。
(もっと読む)
電動機の制御装置
【課題】簡単な調整によって負荷機械に応じた適切な制御パラメータを得ることができ、多種多様な負荷機械を高精度かつ安定に運転可能とした電動機の制御装置を提供する。
【解決手段】電動機16により駆動される負荷機械20の位置が位置指令に一致するように電動機16を制御する制御装置であって、位置制御部12、速度制御部13及び電流制御部16を有する制御装置において、実現したい応答の速さを示す応答性設定信号と負荷機械種別判別信号とに基づいて、位置制御部12、速度制御部13及び電流制御部16にて使用する制御パラメータを自動的に演算する制御パラメータ設定手段23を備え、この制御パラメータ設定手段23における制御パラメータの演算アルゴリズムを、前記負荷機械種別判別信号に応じて変更する。
(もっと読む)
インピーダンス制御パラメータの調整装置および調整方法
【課題】 インピーダンス制御の複数のパラメータを個人のスキルに依存することなく、特別な知識を有していなくても、常に最適なパラメータを調整できるようにする。
【解決手段】 パラメータ初期値算出部117と力指令印加部111と評価基準計測部112と許容値設定部113と粘性パラメータ探索部114と終了判断部115と慣性パラメータ調整部116を備え、力指令印加部11はインピーダンス制御部に対して力指令を入り切りし、評価基準計測部112は力応答の整定時間とオーバシュート量と振動回数を計測し、許容値設定部113はオーバシュート量と整定時間の許容値を設定し、粘性パラメータ探索部114は整定時間が最小となる粘性パラメータを探索し、終了判断部115は調整値と許容値を比較して処理の終了あるいは継続を判断し、慣性パラメータ調整部116はオーバシュート量と整定時間の調整値に応じて慣性パラメータを調整する。
(もっと読む)
学習制御システム及び学習制御方法
【課題】自然勾配法を適用した、計算時間の短い強化学習システム及び強化学習方法を提供する。
【解決手段】学習制御システムは、状態Siに対応する行動価値Oiの更新量を求める第1の学習器103と、状態Siをさらに分割した状態Si,jに対応する行動価値Oi,jの更新量を求める第2の学習器105と、第1及び第2の学習器による行動価値の更新量の、行動価値の空間(Oi,Oi,j)における勾配を自然勾配法の勾配へ変換し、更新前の行動価値に加算することによって行動価値を更新する行動価値決定器107とを備えている。
(もっと読む)
感性モデル装置、感性モデルの性向学習装置及び方法
【課題】 感性モデルの性向特性を適応的に変化させる装置及び方法を提供する。
【解決手段】 本発明の一態様による感性モデル装置は、性向情報を有している。そして、この性向情報に基づいて感情を生成し、該生成された感情に応じて特定の行動を取ることが可能である。本発明の一態様によって、性向情報は、行動に対するユーザ応答によって適応的に変更される。したがって、ユーザとの相互作用によって感性モデルが能動的に反応しうる。
(もっと読む)
駆動制御装置
【課題】 駆動機械の過大慣性振動を検出し、この過大慣性振動を抑制して安定な制御系を実現する駆動制御装置を提供する。
【解決手段】 位置指令信号と位置信号を入力とし駆動機械1の速度指令信号を出力する位置制御手段5と、速度指令信号と速度信号を入力としトルク指令信号を出力する速度制御手段6と、駆動機械1を駆動するトルクがトルク指令信号に一致するよう制御するトルク制御手段2と、開ループ周波数応答のゲイン交差周波数が、周波数の増加に伴い開ループ周波数応答の位相が増加するときの位相交差周波数以下となる状態を検出することにより、慣性設定値に対する駆動機械の慣性が大きいことで制御系が不安定となり発生する過大慣性振動を検出する振動検出手段7と、過大慣性振動が検出された場合に速度制御手段6或いは位置制御手段5のゲインを変更することで振動を抑制する振動抑制手段8を備える。
(もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
パラメータ推定装置
【課題】作業状況の変化によって生じるアクチュエータの制御パラメータの変化量を高精度で推定することができるパラメータ推定装置を提供する。
【解決手段】コントローラ6は、フィードバックループのゲインを測定するループゲイン測定手段23と、ループゲイン測定手段23により測定されたゲインが一定となるように該ゲインの調整値を決定するゲイン交点制御手段24と、ゲイン交点制御手段24により決定されたゲインの調整値から、アクチュエータ5の制御パラメータの規定値に対する変化量を推定するパラメータ推定手段28とを備える。
(もっと読む)
ロボット装置及び動作制御方法
【課題】 ロボット装置自身の感情や本能等の状態に基づいて自律的に行動することを可能とする。
【解決手段】 供給される入力情報S1〜S3に応じた動作を行うロボット装置1であって、順次供給される入力情報S1〜S3の履歴に応じた現在の動作及び次に供給される入力情報S1〜S3に基づいて現在の動作に続く次の動作を、コントローラ32内の動作決定部が決定することにより、ロボット装置1自身の感情や本能等の状態に基づいて自律的に行動する。
(もっと読む)
位置決め制御装置の振動抑制制御装置
【課題】フィルタ位相遅れの影響を受けずに振動の抑制を可能とする。
【解決手段】外乱オブザーバ10を用いた加速度制御系を含む位置決め制御装置の振動抑制制御装置において、位置指令の部分に低域通過フィルタ12を挿入し、位置決め制御装置を対象に設定した外乱オブザーバゲイン値Gdisの周波数を、前記位置指令部分の低域通過フィルタ12のカットオフ周波数とする。ここで、前記位置指令の部分に加えて、速度フィードフォワード指令の部分にも低域通過フィルタ14を挿入し、前記位置決め制御装置を対象に設定した外乱オブザーバゲイン値Gdisの周波数を、前記速度フィードフォワード指令部分の低域通過フィルタのカットオフ周波数とすることができる。
(もっと読む)
自走式移動体の制御システム
【課題】実時間制御において、複合的な目的を達成するとともに作業時間を短縮することが可能な自走式移動体の制御システムを提供する。
【解決手段】自走式掃除機100の制御システム1は、変位可能な本体110と、本体110に取り付けられ、本体110に対して変位可能なアーム120と、本体110を駆動するための車輪駆動用モータユニット133と、アーム120を駆動するための第1のサーボ127と第2のサーボ128と、コンピュータ200とを備え、コンピュータ200は、本体110の変位に関する因子とアーム120の変位に関する因子との両方の因子に基づいて本体110の挙動とアーム120の挙動とを評価する評価関数を利用して、本体110の挙動とアーム120の挙動とを制御するように車輪駆動用モータユニット133と第1のサーボ127と第2のサーボ128とを最適制御する。
(もっと読む)
制御器、制御方法及び制御プログラム
【課題】 自然状態行動勾配(NSG)の推定に関して分散を小さくすることによって、意思決定モデルの構築にかかる時間を短縮すること。
【解決手段】 マルコフ決定過程を用いる意思決定モデルを解くための自然状態行動勾配学習法において、NSGの推定に関して分散が大きくなり、多くの学習ステップを要してしまうという問題を解決するために、従来のNSGの推定式を観察して、そこに含まれているLSDが二次の項で表れていることに着目した。一般にLSDは推定誤差をもつので、NSGの推定式がLSDが二次の項を含むと、その誤差も二次のオーダーで効いてくるため、NSGの推定量の分散が非常に大きくなる。そして、NSGの推定式が、LSDの一次の項のみを含むように統計量の更新と、NSGの更新のアルゴリズムを改善した。
これによって、NSGの推定に関して分散が小さくなり、以って、意思決定モデルの構築にかかる時間を短縮することができた。
(もっと読む)
21 - 40 / 133
[ Back to top ]