
Fターム[5H004GB16]の内容
フィードバック制御一般 (10,654) | 用途 (1,121) | 物流工程、製造工程 (321) | ロボット(マニピュレータ) (133)
Fターム[5H004GB16]に分類される特許
41 - 60 / 133
システム操作者支援のための支援制御装置を備えたシステム、制御操作支援装置、制御操作支援方法、運転操作支援装置、及び運転操作支援方法
走行目標経路生成回路が、制御対象物の現在位置から制御対象物が将来走行することができる走行目標経路を算出し、理想制御信号算出回路が、走行目標経路Pに沿って走行するための制御プロフィールS’を算出し、差異算出回路が、理想制御の大きさS’と制御の現在の大きさS’との差異δを算出する。そして、制御システム支援制御装置は、算出された差異δの大きさに基づいて制御システムを制御することにより、操作者の制御操作を支援する。これにより、理想的な制御状態、操作者の制御操作状態、環境状態及び要求される操作精度からの差異δの大きさの関数である制御操作の支援を運転者に提供することができるので、操作者、環境及び制御対象物を特徴づける諸条件に適した制御操作支援制御を出力することができる。 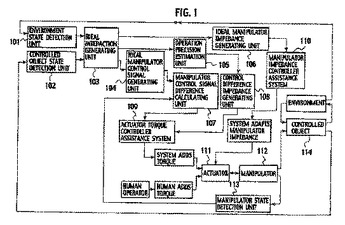 (もっと読む)
(もっと読む)
制御装置及び制御方法

【課題】関節がギア・モータ系で構成されるマニピュレータにおける、完全に測定することができないパラメータ変動を簡易な方法により調整する。
【解決手段】マニピュレータ先端を壁などの固定部に押し当てて、力目標入力fref(N)で押し当てると、ギア・モータだけでなくリンク機構部分のばらつきも含んだ形で力出力fout(N)が出力される。それら2つの値を比較して、R(s)内部の直列ゲインをKrとしたとき、(fout/fref)×Kr=1となるようにKrを設定しR(s)を設計する。制御器内の各関節軸のR(s)すべてに反映させ、パラメータばらつきが原因のfref→foutの制御偏差を0にするように調整する。
(もっと読む)
移動体の入力決定手段、及びその手段を有するハイブリッド車両と多関節移動ロボット

【課題】将来状態の予測が困難なハイブリッド車両や移動ロボットでも、最適制御問題を解いて特定動作における損失の最小化を図る。
【解決手段】入力決定手段15は外部入力11と出力12とを入力とし、内部入力16を生成する。移動体10は冗長性を持ち、ある外部入力11に対応する出力12を生成する方法が複数個あるものを対象とする。内部入力16は入力決定手段15により、予め決められた評価関数を最小または最大になるように決定される。入力決定手段15は将来状態予測手段21、最適化演算手段22、制約条件判定手段23を有する。最適化演算結果通知手段27は最適化演算で得られた解が実行不可能な場合そのことを外部に通知するために設けたものであり、LED、液晶表示、メモリなどとして実現される。これは開発時のデバッグを容易にするのみならず、オフライン診断としても使用する。
(もっと読む)
モータによる位置制御装置
【課題】
本発明は、フィードバック制御系の構造および応答に無関係に、位置および速度フィードフォワード制御系を周波数応答に基づいて、個別に調整可能となる位置制御装置を提供する。
【解決課題】
本発明は、モータの位置検出値を位置指令値に追従させることを目的としたモータによる位置制御装置において、速度規範指令値を出力する速度規範モデルと、速度制御器と、速度フィードフォワード出力信号を出力する速度フィードフォワード部と、位置規範指令値を出力する位置規範モデルと、位置制御器と、位置フィードフォワード出力信号を出力する位置フィードフォワード部と、から構成されることを特徴とする。
(もっと読む)
データ処理装置、データ処理方法、及びプログラム
【課題】ロボット等のエージェントが、汎化が可能な範囲で目標をたて、その目標を達成する行動を、迅速にとる。
【解決手段】生成装置20では、時系列データ予測部21が、時系列データを予測するための予測モデルとしてのRNNを用い、時系列データの入力に対して、時系列データの予測値を求める。さらに、目標決定部22が、時系列データの予測値に基づき、時系列データの目標値を決定し、誤差計算部23が、予測値の、目標値に対する誤差を計算する。そして、時系列データ探索部24が、予測値の誤差を減少させる、RNNへの時系列データの入力である誤差減少データを探索する。本発明は、例えば、ロボット等のエージェントを制御する場合に適用できる。
(もっと読む)
制御器、制御方法および制御プログラム
【課題】試行回数(学習時間)を減少させて、実タスクへ適用可能な方策勾配法のアルゴリズムを利用した制御器を提供する。
【解決手段】制御信号を制御対象に与える処理を行って、制御対象の状態量を観測器(たとえば、位置センサ、角度センサ、加速度センサ、角加速度センサなど)で観測し、この観測結果により定常分布の対数の偏微分を推定し、これを用いて、新しい自然方策勾配である「自然定常方策勾配」を推定して、方策パラメータを更新し、これにより方策を更新する。そして、更新された方策により、さらに、制御対象が制御される。
(もっと読む)
運動指令生成装置
【課題】複雑な動作条件を満足する運動指令値をリアルタイムで計算できる指令値生成装置を得るものである。
【解決手段】制御対象の動作条件が入力される入力部と、時間の関数である基本関数と前記基本関数毎に未知の重み係数を乗じて足し合わせた重み付き線形和によって運動指令値を表した線形和情報を作成し、前記動作条件に応じて前記重み係数を含む最適化変数に対する線形の等式及び不等式によって制約条件及び評価指標を表した線形計画問題を作成して線形計画問題情報として記憶する線形計画問題設定部と、前記線形計画問題情報が表す前記線形計画問題を解くことによって、前記重み係数を求める重み係数算出部と、前記線形和情報に基づき前記基本関数に前記重み係数算出部で求めた重み係数を乗じて足し合わせた重み付き線形和によって前記運動指令値を算出する指令値算出部とを備えた。
(もっと読む)
制御器、制御方法および制御プログラム
【課題】計算量を減少させて、実タスクへ適用可能な方策勾配法のアルゴリズムを利用した制御器を提供する。
【解決手段】制御信号を制御対象に与える処理を行って、制御対象の状態量を観測器(たとえば、位置センサ、角度センサ、加速度センサ、角加速度センサなど)で観測し、この観測結果により定常分布の対数の偏微分を推定することで、方策の勾配を推定し、推定結果に基づいて、方策を更新する。そして、更新された方策により、さらに、制御対象が制御される。
(もっと読む)
油圧駆動システムの制御方式
【課題】制御上の工夫によって、サーボ弁等の高価なアクチュエータを用いなくても、アクチュエータを精度よく動作させることができる制御方式を提供する。
【解決手段】空間的及び時間的に連続した連続値制御信号uを出力する主制御部11,12と、アクチュエータ2との間に、切換部14を介して選択的にフィードバック変調器20を接続する。フィードバック変調器20は、アクチュエータ2における、入力信号の受付け可能時間間隔、入力信号の取り得る離散値、及び、入出力特性に基づいた変換式によって、連続値制御信号uを空間的及び時間的に離散した離散値制御信号uQに変換する。切換部14は、連続値制御信号uの値が変調領域に入っているときにはアクチュエータ2へ離散値制御信号uPが出力され、それ以外のときは連続値制御信号uが出力されるように、接続を切り換える。
(もっと読む)
ニューラルネットワーク装置及びそれを用いたロボットカメラ制御装置並びにニューラルネットワークプログラム
【課題】煩雑な作業の省力化を図ることができ、従来よりも短時間で最適モデルを構築することができるニューラルネットワーク装置及びそれを用いたロボットカメラ制御装置並びにニューラルネットワークプログラムを提供すること。
【解決手段】ロボットカメラ制御装置1は、被写体を撮影するセンサカメラ10と、被写体の位置を検出する被写体検出装置20と、被写体を撮影するカメラを有するロボットカメラ30と、ロボットカメラ30を操作するロボカメ操作器40と、ニューラルネットワーク装置100の学習及びロボットカメラ30の撮影動作を制御する学習制御装置50とを備え、学習制御装置50は、現在時刻以前のデータを入力する際のステップ間隔値及びステップ数を設定する入力層最適化手段120を備える。
(もっと読む)
倒立車輪式移動ロボットとその制御方法
【課題】重心位置や路面傾斜角が変動した場合であっても目標とする倒立走行を行うことが可能な倒立車輪式移動ロボットとその制御方法を提供すること。
【解決手段】本発明にかかる倒立車輪式移動ロボットで10は、駆動輪2を駆動する駆動部12と、倒立車輪式移動ロボット10の実状態を検出する検出部14と、検出部14によって検出した実状態と目的状態の偏差に応じて制御量を生成し、駆動部12に対して出力することにより、倒立走行を制御する倒立走行コントローラ11と、検出部14によって検出された車輪回転角速度又は車体の移動速度と、目標状態の車輪回転角速度又は車体の移動速度の偏差に応じた車体傾斜角補正量を、目標状態に含まれる目標車体傾斜角に反映させる車体傾斜角補正量算出部19とを備えている。
(もっと読む)
デジタルPID制御装置
【課題】デジタル制御化されたPID制御装置の制御動作を低振動化および低騒音化し、制御精度を向上させる。
【解決手段】デジタルPID制御装置であって、制御対象1の現在のアナログ状態量を検出する検出器2と、現在のアナログ状態量を現在のデジタル状態量に変換するAD変換器11と、制御対象1の目標のデジタル状態量と現在のデジタル状態量との差分である偏差量を入力とし、制御対象1に対するデジタル操作量を生成するデジタルPID制御手段9とを備え、デジタルPID制御手段9は、偏差量の絶対値が設定値以下の場合には偏差量を抑圧して出力する積分用不感帯部12および微分用不感帯部13のうち少なくとも一方を備え、積分用不感帯部12の出力に対するデジタル積分演算及び微分用不感帯部13の出力に対するデジタル微分演算のうち少なくとも一方の演算を実行することによりデジタル操作量を生成する。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】機器の故障から効率的に回復することができるようにする。
【解決手段】システム2−4の制御が正常に行われていないとシステム状態判定部2−2により判定された場合、システム予測部2−9により予測されるシステム2−4の挙動に基づいて、目標記憶部2−1に記憶されている目標値Gを実現するためのモータ信号mtの時系列であるモータ信号系列m1,m2,…,mTが探索部2−5により探索される。モータ信号系列m1,m2,…,mTが1時刻分ずつシステム2−4に実際に入力されることによって目標値Gを実現することができた場合、モータ信号系列m1,m2,…,mTと、対応するセンサ信号系列S1,S2,…,STに基づいて、制御部2−3がシステム2−4を制御するのに用いるパラメータが更新される。本発明は、自動制御を行う情報処理装置に適用することができる。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】搬送アクチュエータの振動を抑制すると共に、各駆動軸の回転動作が他の駆動軸に与える影響を低減する。
【解決手段】右搬送アクチュエータ32が伸縮動作する場合、中央制御装置10の制御部12は、縮み位置から伸び位置へ移動させるための位置指令を右搬送アクチュエータ制御装置30に出力し、現状を維持するための0°の位置指令を旋回アクチュエータ制御装置40に出力し、現状を維持するための距離0の位置指令を左搬送アクチュエータ制御装置20に出力する。右搬送アクチュエータ制御装置30は制振制御用の位置ゲインを用いて制振制御を行い、旋回アクチュエータ制御装置40は駆動軸42−Kが回転しないように維持制御を行い、左搬送アクチュエータ制御装置20は通常の位置ゲインを用いて駆動軸22−Kが回転しないように維持制御を行う。
(もっと読む)
モデル予測制御装置およびモデル予測制御方法
【課題】制御対象の入出力制約に幅広く対処しつつ、周期的な目標値に制御量を追従させる。
【解決手段】仮想目標値生成部2は、繰り返し目標値rの位相が調整された仮想目標値系列ν(k)を目標値としてモデル予測制御器3に与え、モデル予測制御器3は、評価関数Jの形式に基づいて評価区間中の未来の制御量系列y(k)を制御対象4のモデルから予測し、仮想目標値生成部2から与えられた評価区間中の仮想目標値系列ν(k)を用いることで評価関数Jの値を計算し、その評価関数Jの値が最小になるような操作量系列u(k)を制約条件cを満たす範囲内で求め、後退ホライズン方策に基づいて、その操作量系列u(k)の先頭項のみを実際の操作量uとして制御対象4に出力する。
(もっと読む)
多関節型ロボットの制御方法
【課題】静的な条件で計測し、テーブル化されたコギング補償電流テーブルによる従来のFFコギング補償方式では、重力補償電流による最適位相の変化やエンコーダ取付誤差による最適位相の誤差に対応した位相シフトが行われず、十分な振動抑制効果を発揮できないという課題を有していた。
【解決手段】重力トルク補償電流の検出及びその検出値によるコギング補償位相の補正手段を持ち、さらに、FFコギング補償無効時のモータ電流からコギング周波数成分の検出及びその検出値によるコギング補償最適位相のモータ個体差の補正手段を持つことで、重力補償電流によるコギング補償の最適位相の変化あるいはエンコーダ取付誤差による最適位相誤差が存在しても、コギングトルクに起因する振動を抑制することができる。
(もっと読む)
ロボット制御カテーテルおよびその較正方法
心臓カテーテルのようなロボット装置を較正する方法は、第1振動周波数で第1振動ベクトルを与えることにより、第1作動軸において装置を振動させるステップを含む。装置を振動させている間に、装置の位置を周期的に測定して複数の位置データ点が生成され、複数の測定軸に関連して装置の位置が表されてもよい。その後、位置データ点は、フーリエ変換アルゴリズムのような信号処理アルゴリズムを用いて処理され、それにより装置の位置を作動軸の移動ベクトルに関連付ける伝達関数を導出する。伝達関数は、分解され、作動軸に対する較正ベクトルとして表現されてもよく、1つまたは複数の測定軸の各々に沿って方向づけられる、ゼロ成分を含む少なくとも1つの成分を含む較正ベクトルを含んでいてもよい。プロセスは、較正することが望ましい任意の作動軸に対して繰り返してもよい。 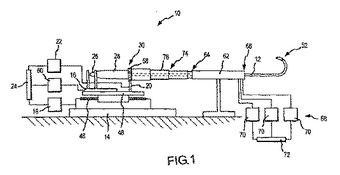 (もっと読む)
(もっと読む)
拡張仮想パワーモニタを備えることにより制御対象の安定性を評価解析する機能を備えた制御システム
【課題】システムに対して流入する仮想パワーを観測することによって当該システムの安定性を評価解析する制御システム2に対して、その安定・不安定の判定を是正する。
【解決手段】ユーザ制御対象3と、ユーザ制御則5と、ユーザ制御対象3からのフィードバック信号を受けてユーザ制御対象3に操作量を入力し得る保守的な制御則Hと、保守的な制御則Hからユーザ制御対象3へ仮想的に伝達される仮想パワー及び保守的な制御則からの操作量の大きさ及びユーザ制御対象の出力の大きさを観測する拡張仮想パワーモニタ10と、を備える。拡張仮想パワーモニタ10は、仮想パワーPv(t)のa倍および保守的な制御則からの操作量の大きさを二乗したb倍及びユーザ制御対象の出力の大きさを二乗した−1倍を観測し、それによって安定性の評価関数Ex(t)に、ユーザ制御システムの入出力ゲインが小さいほど安定方向に移行させる項を含める。
(もっと読む)
多関節型ロボットの制御方法
【課題】従来のオブザーバ制御演算装置では、ロボット自身の姿勢やアームに取り付ける負荷の変化に対応して制御性能の劣化を防ぐには、負荷イナーシャ、状態オブザーバ、状態FBのパラメータのリアルタイムでの演算が必要であり、演算処理の負荷が非常に多くなる。
【解決手段】アームに取り付けられる複数の負荷に応じて予め調整されたパラメータを持つ複数の状態オブザーバと状態FBの演算を同時に行い、アームに取り付けられる負荷情報に基づいてそれぞれの状態FB値のモータ電流指令への加算量を調整する際に、各姿勢におけるアーム回転半径の最大値に対する2乗比の1次関数として定義する姿勢ゲインを乗じることにより、リアルタイムで負荷イナーシャ、状態オブザーバ、状態FBのパラメータ演算を行う必要はなく、ロボットの姿勢変化に応じた振動抑制効果が得られる状態で演算時間を削減できる。
(もっと読む)
制御装置および方法、並びにプログラム
【課題】センサの故障に対してロバストな制御を可能にする。
【解決手段】予測部112は、学習したダイナミクスに基づいて、過去の複数のタイミングの高次元の修正データから、それより後のタイミングの高次元の入力データを予測した予測データを生成し、回帰部103は、予測データを回帰し、修正データ生成部101は、入力データと回帰された予測データとを合成して修正データを生成し、縮約部111は、高次元の修正データの次元を縮約して、入力データより低次元の、制御対象の動作を制御するための位相データを生成する。本発明は、例えばロボットやモータの制御に適用することができる。
(もっと読む)
41 - 60 / 133
[ Back to top ]